Вам также может понравиться
- Presentation 1Документ1 страницаPresentation 1Swapnil MeshramОценок пока нет
- Auto Debit Application FormДокумент2 страницыAuto Debit Application FormSwapnil MeshramОценок пока нет
- Mahila Vikas ProposalДокумент16 страницMahila Vikas ProposalAmeen MtОценок пока нет
- A Project Seminar TTSДокумент10 страницA Project Seminar TTSSwapnil MeshramОценок пока нет
- WorkingДокумент3 страницыWorkingSwapnil MeshramОценок пока нет
- Sales Promotion of Morarjee Textile MillДокумент4 страницыSales Promotion of Morarjee Textile MillSwapnil MeshramОценок пока нет
- r33 RДокумент8 страницr33 RRonel ViolantaОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Rochester MN Unified Development Code (Draft)Документ442 страницыRochester MN Unified Development Code (Draft)randyОценок пока нет
- The Ball Is Now in Their Hands': Lumumba Responds After City Council Rescinds Emergency DeclarationДокумент2 страницыThe Ball Is Now in Their Hands': Lumumba Responds After City Council Rescinds Emergency DeclarationWLBT NewsОценок пока нет
- Banaue Rice Terraces - The Eighth WonderДокумент2 страницыBanaue Rice Terraces - The Eighth Wonderokloy sanchezОценок пока нет
- Appendix 9A: Standard Specifications For Electrical DesignДокумент5 страницAppendix 9A: Standard Specifications For Electrical Designzaheer ahamedОценок пока нет
- Memo in Motion For ContemptДокумент118 страницMemo in Motion For ContemptMark SternОценок пока нет
- PH Measurement TechniqueДокумент5 страницPH Measurement TechniquevahidОценок пока нет
- Shilpa PPT FinalДокумент51 страницаShilpa PPT FinalDrakeОценок пока нет
- Baylan: VK-6 Volumetric Water MeterДокумент1 страницаBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaОценок пока нет
- Ethics, Governance and SustainabilityДокумент408 страницEthics, Governance and Sustainabilityshamli23Оценок пока нет
- Method Statement For LVAC Panel TestingДокумент9 страницMethod Statement For LVAC Panel TestingPandrayar MaruthuОценок пока нет
- Accor vs Airbnb: Business Models in Digital EconomyДокумент4 страницыAccor vs Airbnb: Business Models in Digital EconomyAkash PayunОценок пока нет
- Soft SkillsДокумент117 страницSoft Skillskiran100% (1)
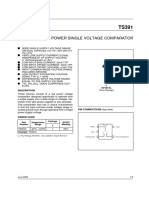
- Ts 391 IltДокумент5 страницTs 391 IltFunnypoumОценок пока нет
- ZirakДокумент4 страницыZiraktaibzirakchamkani81Оценок пока нет
- Model 200-30A200P-31-21A Solenoid ValveДокумент4 страницыModel 200-30A200P-31-21A Solenoid Valveemuno008Оценок пока нет
- Presenting India's Biggest NYE 2023 Destination PartyДокумент14 страницPresenting India's Biggest NYE 2023 Destination PartyJadhav RamakanthОценок пока нет
- Payment Solutions For Travel Platform: SabreДокумент2 страницыPayment Solutions For Travel Platform: Sabrehell nahОценок пока нет
- Manual Circulação Forçada PT2008Документ52 страницыManual Circulação Forçada PT2008Nuno BaltazarОценок пока нет
- Eileen MarcelДокумент3 страницыEileen Marcelapi-3825833Оценок пока нет
- Math30.CA U1l1 PolynomialFunctionsДокумент20 страницMath30.CA U1l1 PolynomialFunctionsUnozxcv Doszxc100% (1)
- Balanced Modulator and Demodulator ExperimentДокумент6 страницBalanced Modulator and Demodulator ExperimentShubham SharmaОценок пока нет
- PSISA Free Practice Exams TestsДокумент2 страницыPSISA Free Practice Exams TestsGoodmanBeguel50% (2)
- Adobe Photoshop 9 Cs2 Serial + Activation Number & Autorization Code AДокумент1 страницаAdobe Photoshop 9 Cs2 Serial + Activation Number & Autorization Code ARd Fgt36% (22)
- Counsel For Plaintiff, Mark Shin: United States District Court Northern District of CaliforniaДокумент21 страницаCounsel For Plaintiff, Mark Shin: United States District Court Northern District of CaliforniafleckaleckaОценок пока нет
- RIE 2013 Dumping and AD DutiesДокумент21 страницаRIE 2013 Dumping and AD Dutiessm jahedОценок пока нет
- F20-W21 - LP1 LP2 Instructions and Grading Rubric-STUDENT VersionДокумент9 страницF20-W21 - LP1 LP2 Instructions and Grading Rubric-STUDENT VersionjohnamenОценок пока нет
- Python Lecture PSBCДокумент83 страницыPython Lecture PSBCPedro RodriguezОценок пока нет
- PSC Single SpanДокумент99 страницPSC Single SpanRaden Budi HermawanОценок пока нет
- Best Practices For SAP-PM History DocumentationДокумент8 страницBest Practices For SAP-PM History DocumentationLaammeem Noon100% (1)
- How To Google Like A Pro-10 Tips For More Effective GooglingДокумент10 страницHow To Google Like A Pro-10 Tips For More Effective GooglingMinh Dang HoangОценок пока нет