Вам также может понравиться
- 2018A - P8. Accionamientos de Velocidad Variable para Maquinas Asincronas Control VectorialДокумент4 страницы2018A - P8. Accionamientos de Velocidad Variable para Maquinas Asincronas Control VectorialStalin MuelaОценок пока нет
- 2018A - P10. Operacion en 4 Cuadrantes de Maquinas ElectricasДокумент3 страницы2018A - P10. Operacion en 4 Cuadrantes de Maquinas ElectricasStalin MuelaОценок пока нет
- Intro InTouch ArchestrA 2018A RIДокумент28 страницIntro InTouch ArchestrA 2018A RIStalin MuelaОценок пока нет
- DISEÑO DE GATE DRIVER S PARA EL DISPARO DE IGBT's EN UN INVERSOR TRIFÁSICOДокумент9 страницDISEÑO DE GATE DRIVER S PARA EL DISPARO DE IGBT's EN UN INVERSOR TRIFÁSICOFeli Zambrano100% (1)
- IO Tags DDEДокумент3 страницыIO Tags DDEStalin MuelaОценок пока нет
- Practica 1 IIДокумент4 страницыPractica 1 IIStalin Muela0% (1)
- Titov Tecnologia Del Proceso de Fundicion PDFДокумент232 страницыTitov Tecnologia Del Proceso de Fundicion PDFStalin MuelaОценок пока нет
- Fisica Ejercicios de RelatividadДокумент2 страницыFisica Ejercicios de RelatividadStalin MuelaОценок пока нет
- Tiristores PDFДокумент26 страницTiristores PDFStalin MuelaОценок пока нет
- Proyecto de Investigacion-FisicaДокумент12 страницProyecto de Investigacion-FisicaLuis CastilloОценок пока нет
- Medidores de Energía EléctricaДокумент8 страницMedidores de Energía EléctricaJuan Diego Cordoba AlvaradoОценок пока нет
- 1damian Tigse Complexivo SimulacroДокумент13 страниц1damian Tigse Complexivo SimulacroPablo SanchezОценок пока нет
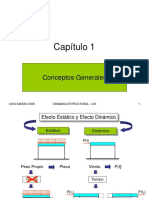
- 1.2-Conceptos GeneralesДокумент22 страницы1.2-Conceptos GeneralesangieОценок пока нет
- Voltimetro de Barras A 6vДокумент3 страницыVoltimetro de Barras A 6vfacster7Оценок пока нет
- ElasticidadДокумент18 страницElasticidadAna Maria U. S.Оценок пока нет
- Simulacion Sistema de Potencia 2Документ15 страницSimulacion Sistema de Potencia 2MiguelОценок пока нет
- El CondensadorДокумент2 страницыEl CondensadorJose Manuel Callecusi GuarachiОценок пока нет
- Presas de Alacenamiento - EjemplosДокумент20 страницPresas de Alacenamiento - EjemplosDulc Ml CrossОценок пока нет
- Lab N°8 CIRCUITOSДокумент16 страницLab N°8 CIRCUITOSMarco Antonio Pampa CondoriОценок пока нет
- Presiones Semana Tres Escuintla (16-07-2022)Документ6 страницPresiones Semana Tres Escuintla (16-07-2022)AmbrosiaОценок пока нет
- 5to Laboratorio-Fisica3-CampoMagnetico de Una Bobina y BalanzaMagneticaДокумент10 страниц5to Laboratorio-Fisica3-CampoMagnetico de Una Bobina y BalanzaMagneticaAndrew KОценок пока нет
- Tarea1 Ejercicio1Документ7 страницTarea1 Ejercicio1MartinSuarezОценок пока нет
- 12 Set111 Unidad Vi SPTДокумент45 страниц12 Set111 Unidad Vi SPTRENE CLIMACOОценок пока нет
- Desarrollo de La Relación Entre Presión y ElevaciónДокумент9 страницDesarrollo de La Relación Entre Presión y ElevaciónFlor Zambrano CconayaОценок пока нет
- Cinetica de Sistemas de Particulas. - Particulas Definidas - 2016-II (A) PDFДокумент31 страницаCinetica de Sistemas de Particulas. - Particulas Definidas - 2016-II (A) PDFAlejandra Correa RojasОценок пока нет
- Practica 2 Circuitos ElectricosДокумент18 страницPractica 2 Circuitos ElectricosYozbeck2000Оценок пока нет
- Potencial ElectricoДокумент26 страницPotencial ElectricoAlexander RiveraОценок пока нет
- Examen 2 Física II Primavera 2022Документ2 страницыExamen 2 Física II Primavera 2022JuanmaSalgadoОценок пока нет
- S1 emДокумент3 страницыS1 emJesús Josiel Mejía FarfanОценок пока нет
- Problemario Analisis de Circuitos CAДокумент10 страницProblemario Analisis de Circuitos CAMaid EllОценок пока нет
- Guias de OndaДокумент12 страницGuias de OndaJorge TrianaОценок пока нет
- Organizador Gráfico Sobre Los Tipos de Transformadores y Sus Aplicaciones.Документ4 страницыOrganizador Gráfico Sobre Los Tipos de Transformadores y Sus Aplicaciones.Criss Dan SF100% (1)
- Ejercicios de DinamicaДокумент8 страницEjercicios de DinamicajhossueОценок пока нет
- Distribución de Voltaje en Una Cadena de AisladoresДокумент37 страницDistribución de Voltaje en Una Cadena de AisladoresJulio SamaniegoОценок пока нет
- Practica 3 Campo Electrico Ejemplo de StudocuДокумент15 страницPractica 3 Campo Electrico Ejemplo de StudocuJhon Alan FernándezОценок пока нет
- Ut 3 Nociones Basicas de ElectricidadДокумент16 страницUt 3 Nociones Basicas de ElectricidadAntonio Herrerías SanabriaОценок пока нет
- Mantenimiento en Motores Electricos PPT 1.pptxTERMINADOДокумент11 страницMantenimiento en Motores Electricos PPT 1.pptxTERMINADOGirasol Kenta100% (1)
- Informe 1 - Elec-MagДокумент3 страницыInforme 1 - Elec-MagSergio Andres Pallares MurilloОценок пока нет
- Tema 03 13 Magnetostática 01Документ9 страницTema 03 13 Magnetostática 01Juan GonzálezОценок пока нет