Вам также может понравиться
- 5000 GK Questions Nagaraj N C-1 PDFДокумент250 страниц5000 GK Questions Nagaraj N C-1 PDFSudar ShanОценок пока нет
- Elastic Versus Plastic Analysis of StructuresДокумент11 страницElastic Versus Plastic Analysis of StructuresJaya ShuklaОценок пока нет
- RRДокумент208 страницRRJaya ShuklaОценок пока нет
- Jao Model Papers PDFДокумент354 страницыJao Model Papers PDFNitish AnandОценок пока нет
- VF (Ky HKKJRH VK Qfozkku Lalfkku Ò Iky: All India Institute of Medical Sciences BhopalДокумент17 страницVF (Ky HKKJRH VK Qfozkku Lalfkku Ò Iky: All India Institute of Medical Sciences Bhopalajay kumarОценок пока нет
- Details Contract Faculty Recruitment 2017 1Документ4 страницыDetails Contract Faculty Recruitment 2017 1akash mishraОценок пока нет
- SssadДокумент3 страницыSssadJaya ShuklaОценок пока нет
- Women Safety Handbook PDFДокумент20 страницWomen Safety Handbook PDFsaurabh018Оценок пока нет
- Q.1. Name Various Softwares Used in The Field of Civil Engineering?Документ6 страницQ.1. Name Various Softwares Used in The Field of Civil Engineering?Jaya ShuklaОценок пока нет
- Previous Years SBI PO Prelims Cut Off PDFДокумент2 страницыPrevious Years SBI PO Prelims Cut Off PDFJaya ShuklaОценок пока нет
- Maths Study Notes Bank English Version 03 05 18 PDFДокумент14 страницMaths Study Notes Bank English Version 03 05 18 PDFJaya ShuklaОценок пока нет
- Faculty Norms AICTEДокумент9 страницFaculty Norms AICTEftpeerОценок пока нет
- VF (Ky HKKJRH VK Qfozkku Lalfkku Ò Iky: All India Institute of Medical Sciences BhopalДокумент17 страницVF (Ky HKKJRH VK Qfozkku Lalfkku Ò Iky: All India Institute of Medical Sciences Bhopalajay kumarОценок пока нет
- Previous Years SBI PO Prelims Cut Off PDFДокумент2 страницыPrevious Years SBI PO Prelims Cut Off PDFJaya ShuklaОценок пока нет
- PGDCA Final Syllabus 2007 REVISED 31st JULY 2007 PDFДокумент13 страницPGDCA Final Syllabus 2007 REVISED 31st JULY 2007 PDFJaya ShuklaОценок пока нет
- AgricultureДокумент16 страницAgricultureTekchand BhardwajОценок пока нет
- Project Report On Hospital Management SystemДокумент42 страницыProject Report On Hospital Management SystemJaya Shukla67% (3)
- Chapter 1Документ13 страницChapter 1neerajzeenОценок пока нет
- Chapter 2Документ9 страницChapter 2prataohiОценок пока нет
- Material Mang PurchaseДокумент2 страницыMaterial Mang PurchaseJaya ShuklaОценок пока нет
- Inequality Sbi Clerk Pre 1-14-02 18Документ19 страницInequality Sbi Clerk Pre 1-14-02 18Jaya ShuklaОценок пока нет
- Chapter 1Документ13 страницChapter 1neerajzeenОценок пока нет
- PalДокумент1 страницаPalJaya ShuklaОценок пока нет
- Two Degrees of Freedom Active Damping Technique For Filter-Based Grid Connected PV SystemsДокумент9 страницTwo Degrees of Freedom Active Damping Technique For Filter-Based Grid Connected PV Systemsrajeev_kumar365Оценок пока нет
- Vector Control of Single-Phase Voltage-SourceДокумент10 страницVector Control of Single-Phase Voltage-SourceJaya ShuklaОценок пока нет
- Biomaterials PDFДокумент71 страницаBiomaterials PDFJaya ShuklaОценок пока нет
- Overview of Biomaterials and Their Use in Midical DevicesДокумент12 страницOverview of Biomaterials and Their Use in Midical Devicesmekyno32Оценок пока нет
- Matlab Install GuideДокумент174 страницыMatlab Install GuideIanTayYiYanОценок пока нет
- Investigation of Active Damping Approaches ForДокумент9 страницInvestigation of Active Damping Approaches ForJaya ShuklaОценок пока нет
- General Unified Integral Controller With ZeroДокумент10 страницGeneral Unified Integral Controller With ZeroJaya ShuklaОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
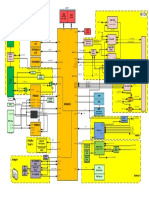
- Diagrama de Bloques ServicellДокумент1 страницаDiagrama de Bloques ServicellJoséViloria100% (1)
- H660GWДокумент2 страницыH660GWQiandra kamilahОценок пока нет
- Analisis Perubahan Laba Kotor Dan Laba Bersih Pada PT Bosowa Berlian Motor Makassar Periode 2016 - 2019Документ71 страницаAnalisis Perubahan Laba Kotor Dan Laba Bersih Pada PT Bosowa Berlian Motor Makassar Periode 2016 - 2019achmad tajiОценок пока нет
- ISO - IEC - 14496 1 System 2010Документ158 страницISO - IEC - 14496 1 System 2010Ezequiel Escudero FrankОценок пока нет
- OS Practical FileДокумент24 страницыOS Practical FileRaghvinder YadavОценок пока нет
- P740 - Dead Zone Complementary ExplanationДокумент18 страницP740 - Dead Zone Complementary ExplanationahmedОценок пока нет
- Challenges of E-Learning During COVID-19 Epidemic A Case Study in One Cambodian High SchoolДокумент11 страницChallenges of E-Learning During COVID-19 Epidemic A Case Study in One Cambodian High SchoolIJMSRTОценок пока нет
- Web Application Development: Bootstrap FrameworkДокумент20 страницWeb Application Development: Bootstrap FrameworkRaya AhmadaОценок пока нет
- How To Get IPC MJPEG Stream Via HTTP CommandsДокумент3 страницыHow To Get IPC MJPEG Stream Via HTTP CommandsИнж.Стефан ЧавдаровОценок пока нет
- Acer JV50-TR - 09230-1 - 0616 RSB Schematic (Bioshunger)Документ61 страницаAcer JV50-TR - 09230-1 - 0616 RSB Schematic (Bioshunger)supriya_banglaОценок пока нет
- Law and TechnologyДокумент22 страницыLaw and TechnologyWorkaholicОценок пока нет
- Digsilent Powerfactory: Relay Model DescriptionДокумент18 страницDigsilent Powerfactory: Relay Model DescriptionBra BicabaОценок пока нет
- IR30-82S Interactive Whiteboard 78inchДокумент2 страницыIR30-82S Interactive Whiteboard 78inchChristopher MckopОценок пока нет
- Practical Assignment: SYBCA-DIV-1-SEM-4 Java Roll No:84Документ12 страницPractical Assignment: SYBCA-DIV-1-SEM-4 Java Roll No:84pОценок пока нет
- Trigno Wireless System Users Guide (MAN-012!2!6)Документ43 страницыTrigno Wireless System Users Guide (MAN-012!2!6)DaxterChaw100% (1)
- Dcs SpecificationДокумент42 страницыDcs Specificationsina20795Оценок пока нет
- Raj Krishnan Vijayaraj: ExperienceДокумент1 страницаRaj Krishnan Vijayaraj: ExperienceAnand KumarОценок пока нет
- Emoji Encryption Using AES AlgorithmДокумент3 страницыEmoji Encryption Using AES AlgorithmEditor IJTSRDОценок пока нет
- Solution Manual For Construction Planning and Scheduling 4 e Jimmie W Hinze Isbn 10 0132473984 Isbn 13 9780132473989Документ28 страницSolution Manual For Construction Planning and Scheduling 4 e Jimmie W Hinze Isbn 10 0132473984 Isbn 13 9780132473989ooetheca.babiism.jomi3100% (49)
- Competitions: Yauhen BabakhinДокумент29 страницCompetitions: Yauhen BabakhinAbanoub EdwardОценок пока нет
- Driver Drowsiness and Alcohol DetectionДокумент9 страницDriver Drowsiness and Alcohol DetectionInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Drive SiemensДокумент368 страницDrive SiemensFabio PioОценок пока нет
- Singh 2020Документ5 страницSingh 2020rowleyjoshieОценок пока нет
- Product Data Sheet Deltav PK Controller Deltav en 3583460Документ21 страницаProduct Data Sheet Deltav PK Controller Deltav en 3583460mani224537Оценок пока нет
- Chapter 4Документ24 страницыChapter 4Anella SunОценок пока нет
- Computer Graphics Lecture 4Документ55 страницComputer Graphics Lecture 4Crystal DzebuОценок пока нет
- Instruction Manual: Electro-Pneumatic Valve PositionersДокумент31 страницаInstruction Manual: Electro-Pneumatic Valve PositionersArdvarkОценок пока нет
- Ah en Emalytics Installation Guide 109859 en 07Документ8 страницAh en Emalytics Installation Guide 109859 en 07thamer al-salekОценок пока нет
- Ge2112 - Fundamentals of Computing and Programming: Unit Iv CДокумент22 страницыGe2112 - Fundamentals of Computing and Programming: Unit Iv CAnitha VeeramaneОценок пока нет
- Motherboard: by John AnthonyДокумент3 страницыMotherboard: by John Anthonyraghu_534Оценок пока нет