Вам также может понравиться
- Structural Behaviour Prediction For Jack-Up Units During Jacking OperationsДокумент3 страницыStructural Behaviour Prediction For Jack-Up Units During Jacking OperationsflcwkОценок пока нет
- Linear Static Analysis of Jack Up Structure at Different Modes of OperationsДокумент7 страницLinear Static Analysis of Jack Up Structure at Different Modes of Operationsmyusuf_engineerОценок пока нет
- TLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFДокумент7 страницTLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFZylyn KuaОценок пока нет
- Reliability of Jack-Up Platforms Against OverturningДокумент27 страницReliability of Jack-Up Platforms Against OverturningAbdulrahman100% (1)
- Comparative Analysis of A J Ack-Up Drilling U Nit With Different Leg SystemsДокумент10 страницComparative Analysis of A J Ack-Up Drilling U Nit With Different Leg SystemsengineeringyusufОценок пока нет
- Landing Gear Design and Stability Evaluation of A Lunar LanderДокумент17 страницLanding Gear Design and Stability Evaluation of A Lunar LanderAhmet SahinozОценок пока нет
- Ocean Engineering: Applying The PD Controller On The Roll Reduction and Track Keeping For The Ship Advancing in WavesДокумент17 страницOcean Engineering: Applying The PD Controller On The Roll Reduction and Track Keeping For The Ship Advancing in WavesAgung W. WidodoОценок пока нет
- Design Selection Analysis For Mooring Positioning System of Deepwater Semi-Submersible PlatformДокумент8 страницDesign Selection Analysis For Mooring Positioning System of Deepwater Semi-Submersible Platformpackya719150% (2)
- Stability and Energy Absorption of A Lunar Lander by 1/6 Scale Drop Testing and Full-Scale SimulationДокумент17 страницStability and Energy Absorption of A Lunar Lander by 1/6 Scale Drop Testing and Full-Scale SimulationAhmet Sahinoz100% (2)
- Float-Over Operations Using Dynamically Positioned Vessels1Документ13 страницFloat-Over Operations Using Dynamically Positioned Vessels1Sơn Nguyễn-Lê100% (1)
- Global Analysis of A Flexible RiserДокумент7 страницGlobal Analysis of A Flexible RiserfdoppelОценок пока нет
- Fed0 PDFДокумент73 страницыFed0 PDFJosé Antonio Alarcón LeónОценок пока нет
- Validation of CFD Simulations of The Flow Around A Full Scale Rowing Blade With Realistic KinematicsДокумент14 страницValidation of CFD Simulations of The Flow Around A Full Scale Rowing Blade With Realistic KinematicsValentina DiamanteОценок пока нет
- Tuned Liquid Dumper PDFДокумент7 страницTuned Liquid Dumper PDFdorivolosОценок пока нет
- Jacket Launching AnalysisДокумент7 страницJacket Launching Analysisiw2fualОценок пока нет
- Resist en CIA de Barcazas RectangularesДокумент5 страницResist en CIA de Barcazas RectangularesFederico CurroОценок пока нет
- Numerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformДокумент10 страницNumerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformFauzan MahadityaОценок пока нет
- Propeller in Vortex RingДокумент16 страницPropeller in Vortex Ringmondy.egОценок пока нет
- Ocean Engineering: Laszlo Arany, S. BhattacharyaДокумент10 страницOcean Engineering: Laszlo Arany, S. BhattacharyaLale ÖnerОценок пока нет
- The Dynamics of Monopile-Supported Wind Turbines in Nonlinear SoilДокумент7 страницThe Dynamics of Monopile-Supported Wind Turbines in Nonlinear SoilMa RcoОценок пока нет
- Hutton TLP InstallationДокумент10 страницHutton TLP InstallationDzaki AuliaОценок пока нет
- 3 - Miedema - Drag Embedded Anchor Holding CapacityДокумент30 страниц3 - Miedema - Drag Embedded Anchor Holding Capacitycxb07164100% (1)
- Rsu Drilling Mooring Riser ProposalДокумент9 страницRsu Drilling Mooring Riser ProposalCROSSFIELD ENGINEERING ENERGYОценок пока нет
- Impact of Hull Propeller Rudder Interaction On Ship Powering AssessmentДокумент15 страницImpact of Hull Propeller Rudder Interaction On Ship Powering AssessmentPedro ParenteОценок пока нет
- Lab 7 DraftДокумент22 страницыLab 7 Draftapi-252392235Оценок пока нет
- Numerical Flow and Performance Analysis of Waterjet Propulsion SystemДокумент22 страницыNumerical Flow and Performance Analysis of Waterjet Propulsion SystemAlex BmxОценок пока нет
- RANSE Simulations of Surface Piercing PropellersДокумент5 страницRANSE Simulations of Surface Piercing PropellershaujesОценок пока нет
- I 11 292Документ9 страницI 11 292Rasheed YusufОценок пока нет
- Amecrc PDFДокумент17 страницAmecrc PDFshimul2008Оценок пока нет
- Forefoot Design For Planing HullsДокумент17 страницForefoot Design For Planing Hullsadslfasdf100% (1)
- Mechanics For RisersДокумент13 страницMechanics For RisersDirgny RossiОценок пока нет
- Jacking Operation Elements: Section 1 LegsДокумент6 страницJacking Operation Elements: Section 1 LegsAhmed AdelОценок пока нет
- Helicopter Dynamic Stability-1Документ7 страницHelicopter Dynamic Stability-1KaradiasОценок пока нет
- Experimental Investigation of A Model Jack-Up Unit On ClayДокумент9 страницExperimental Investigation of A Model Jack-Up Unit On ClayArpit ParikhОценок пока нет
- Ship Vibration PDFДокумент14 страницShip Vibration PDFdewiОценок пока нет
- Park 2017Документ5 страницPark 2017manatee15947Оценок пока нет
- Marine LiftingДокумент17 страницMarine LiftingMarian LazarОценок пока нет
- Wind Evaluation New Indian River Inlet BridgeДокумент26 страницWind Evaluation New Indian River Inlet BridgegastonОценок пока нет
- Turner1988 PDFДокумент12 страницTurner1988 PDFGerTranОценок пока нет
- Paper LiuДокумент4 страницыPaper LiuRoshan ShanmughanОценок пока нет
- Effect of Pretension On Moored Ship RespДокумент13 страницEffect of Pretension On Moored Ship RespIvandito HerdayandityaОценок пока нет
- 15th Numerical Towing Tank Symposium PDFДокумент223 страницы15th Numerical Towing Tank Symposium PDFAnonymous mv84nhzОценок пока нет
- Pile To Slab Bridge Connections: Mohamed I. Ayoub, David H. Sanders and Ahmed IbrahimДокумент10 страницPile To Slab Bridge Connections: Mohamed I. Ayoub, David H. Sanders and Ahmed IbrahimIsom Bahri BahriОценок пока нет
- Theoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatДокумент10 страницTheoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatJuan Santiago Latigo ColliОценок пока нет
- 1979-C.L。Kirk and E.UДокумент11 страниц1979-C.L。Kirk and E.UShuai MengОценок пока нет
- Application of RPD On Spudcan SlidingДокумент6 страницApplication of RPD On Spudcan SlidingAzhaghiaОценок пока нет
- High and Low Strain Dynamic Pile Testing - Independent Geoscience Pty LTDДокумент5 страницHigh and Low Strain Dynamic Pile Testing - Independent Geoscience Pty LTDindependentgeoscienceОценок пока нет
- Hetenyi Estimation of Fatigure Life of Jointed Railway BarsДокумент10 страницHetenyi Estimation of Fatigure Life of Jointed Railway BarsphilipyapОценок пока нет
- Numerical Investigation of The Flow Around A Feather Shuttlecock With RotationДокумент7 страницNumerical Investigation of The Flow Around A Feather Shuttlecock With Rotationmuhd luqmanОценок пока нет
- Aerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLДокумент6 страницAerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLVimal ChandОценок пока нет
- Stability of An Underwater Work Platform Suspended From An Unstable ReferenceДокумент6 страницStability of An Underwater Work Platform Suspended From An Unstable ReferenceMohan BabuОценок пока нет
- Study PDFДокумент10 страницStudy PDFDaniel Cano QuinteroОценок пока нет
- 2004.12 Mitsubishi (MHI) Stator-Fin Ship Energy Saving Device DesignДокумент4 страницы2004.12 Mitsubishi (MHI) Stator-Fin Ship Energy Saving Device Designgnd100Оценок пока нет
- Hooft - Maneuverability of Frigates in WavesДокумент10 страницHooft - Maneuverability of Frigates in WavesjdmorapОценок пока нет
- AUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeДокумент4 страницыAUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeSachin SharmaОценок пока нет
- Na ThesisДокумент36 страницNa Thesisrohith bhogadiОценок пока нет
- Acomparison of Jacket and Jack-Up Structural.2001Документ15 страницAcomparison of Jacket and Jack-Up Structural.2001mohamad shahrakОценок пока нет
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Pump Design WorksheetДокумент3 страницыPump Design Worksheetejzuppelli8036100% (8)
- 9-Valves Rating9Документ29 страниц9-Valves Rating9Mohamed FouadОценок пока нет
- Kind of ValvesДокумент2 страницыKind of ValvesMohamed FouadОценок пока нет
- Kind of ValvesДокумент2 страницыKind of ValvesMohamed FouadОценок пока нет
- Design of Pumping Machinery For Lifting Water From Source To Proposed/existing RCC Sump. Annexure-2Документ1 страницаDesign of Pumping Machinery For Lifting Water From Source To Proposed/existing RCC Sump. Annexure-2Sn SatyanarayanaОценок пока нет
- Diaphragm Valves: Prof. DR: Nazih BayomiДокумент68 страницDiaphragm Valves: Prof. DR: Nazih BayomiMohamed FouadОценок пока нет
- Pre-Feasibility Study: S H I P B R E A K I N GДокумент46 страницPre-Feasibility Study: S H I P B R E A K I N GMohamed FouadОценок пока нет
- Cont RoundДокумент1 страницаCont RoundMohamed FouadОценок пока нет
- Pump CalcДокумент8 страницPump CalcMohamed FouadОценок пока нет
- Brochure Marine ServicesДокумент12 страницBrochure Marine ServicesMohamed FouadОценок пока нет
- Propeller Performance and Weight Predictions Appended To The Navy/NASAДокумент40 страницPropeller Performance and Weight Predictions Appended To The Navy/NASAMohamed FouadОценок пока нет
- Modularization Analysis Presentation Revised PDFДокумент38 страницModularization Analysis Presentation Revised PDFshiva1978in@gmail.comОценок пока нет
- Detail - MTU OnlineДокумент1 страницаDetail - MTU OnlineMohamed FouadОценок пока нет
- Hydraulically Driven Deck MachineryДокумент2 страницыHydraulically Driven Deck MachineryMohamed FouadОценок пока нет
- 40ft shallowWaterWorkBarge1Документ1 страница40ft shallowWaterWorkBarge1Mohamed FouadОценок пока нет
- Bollard Pull CalculationДокумент1 страницаBollard Pull CalculationMark Samsel Rohan100% (2)
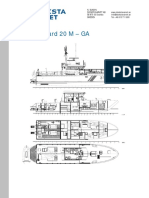
- 20m Ga Drawings1Документ1 страница20m Ga Drawings1Mohamed FouadОценок пока нет
- 40ft shallowWaterWorkBarge3Документ1 страница40ft shallowWaterWorkBarge3Mohamed FouadОценок пока нет
- 40ft shallowWaterWorkBarge5Документ1 страница40ft shallowWaterWorkBarge5Mohamed FouadОценок пока нет
- 40ft shallowWaterWorkBarge4 2Документ1 страница40ft shallowWaterWorkBarge4 2Mohamed FouadОценок пока нет
- Full Text 01Документ61 страницаFull Text 01Imam BaihaqiОценок пока нет
- IACS Shipbuilding and Repair Quality Standards No 47 Rev 5 Oct 2010Документ59 страницIACS Shipbuilding and Repair Quality Standards No 47 Rev 5 Oct 2010nyaungzin100% (2)
- ForanTribon Into 3D Naval Architect Jan12Документ2 страницыForanTribon Into 3D Naval Architect Jan12Mohamed FouadОценок пока нет
- Amirikiann A.analysis and Design .1957.TRANSДокумент55 страницAmirikiann A.analysis and Design .1957.TRANSMohamed FouadОценок пока нет
- 40ft shallowWaterWorkBarge2Документ1 страница40ft shallowWaterWorkBarge2Mohamed FouadОценок пока нет
- Wang DДокумент4 страницыWang DMohamed FouadОценок пока нет
- V53 2 p95 p102 PDFДокумент8 страницV53 2 p95 p102 PDFMohamed FouadОценок пока нет
- 04 2 PDFДокумент11 страниц04 2 PDFMohamed FouadОценок пока нет
- Optimizacion Ship DesignДокумент13 страницOptimizacion Ship Designlucas polo100% (1)
- 1211 1365 PDFДокумент14 страниц1211 1365 PDFMohamed FouadОценок пока нет
- The Community Reinvestment Act in The Age of Fintech and Bank CompetitionДокумент28 страницThe Community Reinvestment Act in The Age of Fintech and Bank CompetitionHyder AliОценок пока нет
- Digital Economy 1Документ11 страницDigital Economy 1Khizer SikanderОценок пока нет
- New Python Basics AssignmentДокумент5 страницNew Python Basics AssignmentRAHUL SONI0% (1)
- Research Article: Dynamic Modelling of A Solar Water Pumping System With Energy StorageДокумент13 страницResearch Article: Dynamic Modelling of A Solar Water Pumping System With Energy Storagehabtamu melsewОценок пока нет
- CHECK - Chapter 11 TCD AnswersДокумент6 страницCHECK - Chapter 11 TCD AnswersbonolomphaОценок пока нет
- Fuel Injection PDFДокумент11 страницFuel Injection PDFscaniaОценок пока нет
- Where Business Happens Where Happens: SupportДокумент19 страницWhere Business Happens Where Happens: SupportRahul RamtekkarОценок пока нет
- Windows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuideДокумент61 страницаWindows Server 2016 Technical Preview NIC and Switch Embedded Teaming User GuidenetvistaОценок пока нет
- Strategi Meningkatkan Kapasitas Penangkar Benih Padi Sawah (Oriza Sativa L) Dengan Optimalisasi Peran Kelompok TaniДокумент24 страницыStrategi Meningkatkan Kapasitas Penangkar Benih Padi Sawah (Oriza Sativa L) Dengan Optimalisasi Peran Kelompok TaniHilmyTafantoОценок пока нет
- Preprints201808 0216 v1Документ15 страницPreprints201808 0216 v1Baptista Jaime MilioneОценок пока нет
- Dur MalappuramДокумент114 страницDur MalappuramSabareesh RaveendranОценок пока нет
- MSC 200Документ18 страницMSC 200Amit KumarОценок пока нет
- Software Requirements SpecificationДокумент9 страницSoftware Requirements SpecificationSu-kEm Tech LabОценок пока нет
- Article On Role of Cyberspace in Geopolitics-PegasusДокумент5 страницArticle On Role of Cyberspace in Geopolitics-PegasusIJRASETPublicationsОценок пока нет
- Jose André Morales, PH.D.: Ingeniería SocialДокумент56 страницJose André Morales, PH.D.: Ingeniería SocialJYMYОценок пока нет
- 11-Potential Use of Volcanic Pumice As A Construction Materialhossain2004Документ7 страниц11-Potential Use of Volcanic Pumice As A Construction Materialhossain2004afzal taiОценок пока нет
- Oracle® Secure Backup: Installation and Configuration Guide Release 10.4Документ178 страницOracle® Secure Backup: Installation and Configuration Guide Release 10.4andrelmacedoОценок пока нет
- MCQs + SEQs Medical Physics Midterm Exam Paper-Fall 2020Документ3 страницыMCQs + SEQs Medical Physics Midterm Exam Paper-Fall 2020Ali Nouman100% (1)
- Med Error PaperДокумент4 страницыMed Error Paperapi-314062228100% (1)
- Wilson v. Baker Hughes Et. Al.Документ10 страницWilson v. Baker Hughes Et. Al.Patent LitigationОценок пока нет
- Nodal Mesh AnalysisДокумент20 страницNodal Mesh Analysisjaspreet964Оценок пока нет
- DLP in EmpowermentДокумент13 страницDLP in EmpowermentTek Casonete100% (1)
- APPSC GR I Initial Key Paper IIДокумент52 страницыAPPSC GR I Initial Key Paper IIdarimaduguОценок пока нет
- PTEG Spoken OfficialSampleTest L5 17mar11Документ8 страницPTEG Spoken OfficialSampleTest L5 17mar11Katia LeliakhОценок пока нет
- OpenGL in JitterДокумент19 страницOpenGL in JitterjcpsimmonsОценок пока нет
- Topics For AssignmentДокумент2 страницыTopics For AssignmentniharaОценок пока нет
- D-Dimer DZ179A Parameters On The Beckman AU680 Rev. AДокумент1 страницаD-Dimer DZ179A Parameters On The Beckman AU680 Rev. AAlberto MarcosОценок пока нет
- Atmosphere Study Guide 2013Документ4 страницыAtmosphere Study Guide 2013api-205313794Оценок пока нет
- RISO RZ User GuideДокумент112 страницRISO RZ User GuideJojo AritallaОценок пока нет
- Applications of Remote Sensing and Gis For UrbanДокумент47 страницApplications of Remote Sensing and Gis For UrbanKashan Ali KhanОценок пока нет