Вам также может понравиться
- Cours Vibration2020Документ14 страницCours Vibration2020Mohammed TlmОценок пока нет
- Oscillateur Mécanique PDFДокумент25 страницOscillateur Mécanique PDFAkram EkkoОценок пока нет
- bji89-CHAPITRE I AKLOUCHEДокумент10 страницbji89-CHAPITRE I AKLOUCHEhakim1348Оценок пока нет
- Ondes v3Документ42 страницыOndes v3Abder BenОценок пока нет
- 6G3Oscillations PDFДокумент22 страницы6G3Oscillations PDFAliOucharОценок пока нет
- OscillateursДокумент27 страницOscillateursbeinouОценок пока нет
- Oscillateurs PDFДокумент26 страницOscillateurs PDFzaki.loukioОценок пока нет
- Cours Lois Électriques 32Документ112 страницCours Lois Électriques 32Frédéric QuérinjeanОценок пока нет
- Vibration PDFДокумент39 страницVibration PDFahmed ahmedОценок пока нет
- Les OscillationsДокумент20 страницLes OscillationsSouha MiraleОценок пока нет
- Oscillations Mécaniques Libres PDFДокумент6 страницOscillations Mécaniques Libres PDFAzizElheniОценок пока нет
- Fiziiii II ParcДокумент25 страницFiziiii II ParcsalihpatkovicОценок пока нет
- CM-ch1-oscillations Libres Non AmortiesДокумент11 страницCM-ch1-oscillations Libres Non AmortiesMoussaabdou AsmaОценок пока нет
- 6 G3 OscillationsДокумент22 страницы6 G3 OscillationsnateusssОценок пока нет
- Cours VibrationsДокумент15 страницCours Vibrationssarah filaliОценок пока нет
- OcillateursДокумент77 страницOcillateursreneОценок пока нет
- Ch1 - Oscillateurs HarmoniquesДокумент6 страницCh1 - Oscillateurs Harmoniquesloubna moufidОценок пока нет
- Pendule OscillantДокумент12 страницPendule OscillantRad Ouan100% (1)
- ExtraitДокумент8 страницExtraitManou JatawОценок пока нет
- Chapitre 1 Oscillations 2016-2017Документ14 страницChapitre 1 Oscillations 2016-2017bessisnathaneОценок пока нет
- Chap ECT1 Phenomenes MecaniquesДокумент5 страницChap ECT1 Phenomenes MecaniqueslenormandОценок пока нет
- Ondes MecaniqueДокумент9 страницOndes MecaniqueMalik BeeryОценок пока нет
- Rappels de Cours Cinetique DynamiqueДокумент14 страницRappels de Cours Cinetique DynamiquefaridОценок пока нет
- Systemes 1ddlДокумент21 страницаSystemes 1ddlYoucef BenhalilemОценок пока нет
- Série 2 - Phénomène de Vibration - 20 - 21Документ3 страницыSérie 2 - Phénomène de Vibration - 20 - 21Kpabou KpabouОценок пока нет
- 1 Chapitre1-1ddlДокумент25 страниц1 Chapitre1-1ddlraffai_nadaОценок пока нет
- Points Essentielles: Chapitre I: Généralité Sur Les VibrationsДокумент20 страницPoints Essentielles: Chapitre I: Généralité Sur Les VibrationsJuanDeagDZОценок пока нет
- Chap1 - Introduction À L'étude Des Systèmes OscillantsДокумент6 страницChap1 - Introduction À L'étude Des Systèmes OscillantsRomaissa LoulhaciОценок пока нет
- Travaux Diriges Vibrations 2023Документ4 страницыTravaux Diriges Vibrations 2023zeynab Rassoul100% (1)
- 9 Generalite Systemes OscillantsДокумент19 страниц9 Generalite Systemes OscillantsMilliardaire RüssëОценок пока нет
- Cour Vibrations Et OndesДокумент8 страницCour Vibrations Et Ondesfateh2014Оценок пока нет
- Année Prépa Oscillateurs, Généralités PDFДокумент176 страницAnnée Prépa Oscillateurs, Généralités PDFAbdelkader Faklani DouОценок пока нет
- Vibrations I IДокумент80 страницVibrations I IkimoОценок пока нет
- Solutions Exercices VibrationsДокумент61 страницаSolutions Exercices VibrationsJefthé Ebabong100% (1)
- Compte Rendu Du TP de Mécanique Du PointДокумент14 страницCompte Rendu Du TP de Mécanique Du PointBoutayna J03Оценок пока нет
- Chapitre IДокумент8 страницChapitre IChica dela DjazairОценок пока нет
- Module 7Документ40 страницModule 7jamaldeidaОценок пока нет
- Accessibilite Corde Vibrante PDFДокумент3 страницыAccessibilite Corde Vibrante PDFClidyОценок пока нет
- Chapitre II: Oscillations Libres Des Systemes A Un Seul Degre de LiberteДокумент19 страницChapitre II: Oscillations Libres Des Systemes A Un Seul Degre de LiberteMasque De MortОценок пока нет
- TD 1 PDFДокумент1 страницаTD 1 PDFMahmoudi DaniaОценок пока нет
- Serie TD02Документ2 страницыSerie TD02azzeddineazez5Оценок пока нет
- TleD - PHY - L5 - Oscillations Mécaniques LibresДокумент8 страницTleD - PHY - L5 - Oscillations Mécaniques LibresYssah SerifouОценок пока нет
- Chapitre 8-OscillateurFДокумент18 страницChapitre 8-OscillateurFwallacechanda2003Оценок пока нет
- CH11 Oscillateur Excitation ResonanceДокумент14 страницCH11 Oscillateur Excitation ResonanceJagoda PasikowskaОценок пока нет
- Systèmes Oscillants - DecrementДокумент34 страницыSystèmes Oscillants - Decrementkhaoula2013Оценок пока нет
- Physique Des Ondes II - 2A - Poly - 2022 2023Документ48 страницPhysique Des Ondes II - 2A - Poly - 2022 2023Tadessé NicolyОценок пока нет
- Cours de Vibrations 2022 Chapitre 2Документ21 страницаCours de Vibrations 2022 Chapitre 2koruko basketОценок пока нет
- Cours de Physique Des Ondes Chapitre Trois Version 6Документ18 страницCours de Physique Des Ondes Chapitre Trois Version 6aouimeur abdellehОценок пока нет
- TD Oscillateurs PDFДокумент3 страницыTD Oscillateurs PDFAnas Saada100% (1)
- Chapitre 1 (Généralité Sur Les Vibrations)Документ3 страницыChapitre 1 (Généralité Sur Les Vibrations)chahd miassaОценок пока нет
- UE3-physique-1-notions de BaseДокумент26 страницUE3-physique-1-notions de Basesun-nee-chan9Оценок пока нет
- Bnyy0-CHAPITRE II AkloucheДокумент6 страницBnyy0-CHAPITRE II Aklouchehakim1348100% (1)
- Synthà Se OscillateursДокумент1 страницаSynthà Se OscillateursInes BrosseniОценок пока нет
- Roue de MaxwellДокумент6 страницRoue de MaxwellDjamel BoukredimiОценок пока нет
- OscillationsДокумент22 страницыOscillationscoucou garbiОценок пока нет
- Ondes Et VibrationsДокумент147 страницOndes Et VibrationsAlaa Bouarfa80% (5)
- Rehabilitation Du Beton ArmeДокумент107 страницRehabilitation Du Beton ArmeMohamed Radhouane100% (1)
- Examen Fog s6 GCДокумент2 страницыExamen Fog s6 GCaliabdalghafour100% (2)
- Lpee RSTC N°137-138 2018 WebДокумент120 страницLpee RSTC N°137-138 2018 Webaliabdalghafour100% (1)
- Les Grandes Familles de Materiaux CompositesДокумент8 страницLes Grandes Familles de Materiaux Compositeszebra00Оценок пока нет
- Devoir 2Документ1 страницаDevoir 2aliabdalghafourОценок пока нет
- Portees Accreditees BTP - CompressedДокумент142 страницыPortees Accreditees BTP - CompressedMANERERОценок пока нет
- L'Effet D'Interferences de Deux Fondations Filantes Etroitement Espacees Reposant Sur Un Sable Renforce Par GeogrillesДокумент5 страницL'Effet D'Interferences de Deux Fondations Filantes Etroitement Espacees Reposant Sur Un Sable Renforce Par GeogrillesaliabdalghafourОценок пока нет
- Matériaux CompositesДокумент1 страницаMatériaux Compositesaliabdalghafour0% (1)
- Polycopie Bourokba PDFДокумент66 страницPolycopie Bourokba PDFkovaryОценок пока нет
- Béton ArméДокумент1 страницаBéton ArméaliabdalghafourОценок пока нет
- Charpente MétalliqueДокумент1 страницаCharpente MétalliquealiabdalghafourОценок пока нет
- Béton ArméДокумент1 страницаBéton ArméaliabdalghafourОценок пока нет
- Cisaillement PDFДокумент8 страницCisaillement PDFbecemОценок пока нет
- Elastic It ÉДокумент1 страницаElastic It ÉaliabdalghafourОценок пока нет
- Elastic It ÉДокумент1 страницаElastic It ÉaliabdalghafourОценок пока нет
- Agregextgenciv 158601Документ121 страницаAgregextgenciv 158601aliabdalghafourОценок пока нет
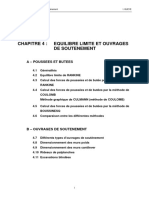
- Sou TenementДокумент14 страницSou TenementSoumaya KaraouiОценок пока нет
- CivilДокумент16 страницCivilaliabdalghafourОценок пока нет
- TD Murs de Soutc3a8nementДокумент5 страницTD Murs de Soutc3a8nementaliabdalghafourОценок пока нет
- Escente de Charges Et Ondations: I - Définition Et Rôle Des FondationsДокумент5 страницEscente de Charges Et Ondations: I - Définition Et Rôle Des FondationsCédric Bruel BahoueОценок пока нет
- Calcul D Un Mur Fait de Blocs Et Renforcé Par Des Géotextiles en Zone SismiqueДокумент6 страницCalcul D Un Mur Fait de Blocs Et Renforcé Par Des Géotextiles en Zone SismiquealiabdalghafourОценок пока нет
- Srie 2 PDFДокумент4 страницыSrie 2 PDFaliabdalghafourОценок пока нет
- Sotenements PDFДокумент20 страницSotenements PDFghioouОценок пока нет
- Etude de Stabilité Et Confortemant Du Glissement de Terrain de Louvar Imaaliouen CheminiДокумент158 страницEtude de Stabilité Et Confortemant Du Glissement de Terrain de Louvar Imaaliouen Cheminialiabdalghafour50% (2)
- Chapitre II - Les Murs de Soutennement PDFДокумент4 страницыChapitre II - Les Murs de Soutennement PDFaliabdalghafourОценок пока нет
- Guide Murs de Soutenement PDFДокумент9 страницGuide Murs de Soutenement PDFHoussam Diab67% (3)
- Chap-2-Poussees-Et-Buteespppppppppppppppp 25 PDFДокумент63 страницыChap-2-Poussees-Et-Buteespppppppppppppppp 25 PDFaliabdalghafourОценок пока нет
- Salem E 2014-06-20Документ121 страницаSalem E 2014-06-20aliabdalghafourОценок пока нет
- 03 Fondationssuperficielles Solutionnairetudiants 131225081949 Phpapp02Документ14 страниц03 Fondationssuperficielles Solutionnairetudiants 131225081949 Phpapp02YassinDZОценок пока нет
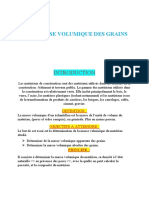
- Masse VolumiqueДокумент9 страницMasse VolumiqueMohammed MadaniОценок пока нет
- Bac 2012 Linguistique CORRECTIONДокумент2 страницыBac 2012 Linguistique CORRECTIONalliancemaliinformatiqueОценок пока нет
- Cales Doc 1536Документ8 страницCales Doc 1536vincebrahim vinceОценок пока нет
- La Subordonnée Relative Et Conjonctive - Leçon.Документ2 страницыLa Subordonnée Relative Et Conjonctive - Leçon.Sami MÉKOUARОценок пока нет
- L'OFPPT Accompagne Les Politiques Sectorielles Du Maroc - Les Métiers Liés À L'aéronautiqueДокумент22 страницыL'OFPPT Accompagne Les Politiques Sectorielles Du Maroc - Les Métiers Liés À L'aéronautiqueYahya ElamraniОценок пока нет
- Traitement Des SolsДокумент57 страницTraitement Des SolsjhdmssОценок пока нет
- Les Type Des ReseuxДокумент6 страницLes Type Des ReseuxMį MǿǚОценок пока нет
- Compte Rendu Des Travaux Pratiques RDMДокумент20 страницCompte Rendu Des Travaux Pratiques RDMAbir JamaliОценок пока нет
- Eléments Linguistiques Pour Le FLE Cours1Документ38 страницEléments Linguistiques Pour Le FLE Cours1aydaaОценок пока нет
- Rupture Des Matériaux: SommaireДокумент46 страницRupture Des Matériaux: SommaireAngelОценок пока нет
- Cours 10 Plans À Mesures RépétéesДокумент12 страницCours 10 Plans À Mesures RépétéesMehdi ChlifОценок пока нет
- Rapport de Stage ElectricienДокумент23 страницыRapport de Stage ElectricienCaroline Delcroix56% (9)
- SysML Taille CrayonДокумент3 страницыSysML Taille Crayonsouf ghouf100% (1)
- 009 - Les Tuples InfoДокумент6 страниц009 - Les Tuples Infonajwa rachidiОценок пока нет
- Simulation Des ProcédésДокумент55 страницSimulation Des ProcédéspirloОценок пока нет
- Sens Et Complexité(s) : (Pro) Positions ÉpistémologiquesДокумент20 страницSens Et Complexité(s) : (Pro) Positions ÉpistémologiquesrcarturoОценок пока нет
- Descripteurs B2Документ8 страницDescripteurs B2rastignac2007Оценок пока нет
- Mip Map Doc-Prof MoukhtariДокумент8 страницMip Map Doc-Prof MoukhtariMeryemHmouri100% (1)
- Calcul de L'effort de LaminageДокумент207 страницCalcul de L'effort de LaminageBessem Bhiri100% (1)
- Clim 20Документ1 страницаClim 20Gastov GhassenОценок пока нет
- 1 Gestion de Projet WooclapДокумент117 страниц1 Gestion de Projet WooclapV1 Teach100% (2)
- Exercices Principe D'inertie 2-1Документ1 страницаExercices Principe D'inertie 2-1Amine Alami50% (6)
- Tab de Bord RHДокумент10 страницTab de Bord RHnajm007Оценок пока нет
- Corrige de L - Exercice de GeologieДокумент1 страницаCorrige de L - Exercice de GeologieIsmail Elharghi75% (4)
- Voyageur de Commerce - Recuit SimuléДокумент25 страницVoyageur de Commerce - Recuit SimuléAli Ben Brahim50% (4)
- File 73211Документ14 страницFile 73211YoussОценок пока нет
- Francofolie 1 LivreДокумент194 страницыFrancofolie 1 LivreFlorinskaya Alexandra100% (2)
- الفرائد الذريةДокумент1 032 страницыالفرائد الذريةمحمد الأمين شرفاويОценок пока нет
- Cours AFCДокумент7 страницCours AFCMohammed amine essanaoubarОценок пока нет