Вам также может понравиться
- Errata TMS320TCI6614Документ76 страницErrata TMS320TCI6614Pankaj GoyalОценок пока нет
- TMS320TCI6614 DatasheetДокумент270 страницTMS320TCI6614 DatasheetPankaj GoyalОценок пока нет
- ArctanДокумент9 страницArctanPankaj GoyalОценок пока нет
- ArctanДокумент9 страницArctanPankaj GoyalОценок пока нет
- Accelerate Multicore Application Development With Keystonee PDFДокумент8 страницAccelerate Multicore Application Development With Keystonee PDFPankaj GoyalОценок пока нет
- Turbo Stop CriterionДокумент22 страницыTurbo Stop CriterionPankaj GoyalОценок пока нет
- Paving The Path For Wireless PDFДокумент12 страницPaving The Path For Wireless PDFPankaj GoyalОценок пока нет
- Paving The Path For Wireless PDFДокумент12 страницPaving The Path For Wireless PDFPankaj GoyalОценок пока нет
- 3rd Generation Partnership Project Rel-9Документ80 страниц3rd Generation Partnership Project Rel-9Benjamin DevОценок пока нет
- LTE in A Nutshell - Physical Layer PDFДокумент18 страницLTE in A Nutshell - Physical Layer PDFMarco SignoriniОценок пока нет
- Reed MulerДокумент6 страницReed MulerPankaj GoyalОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Evolution of Campus Switching: Marketing Presentation Marketing PresentationДокумент35 страницEvolution of Campus Switching: Marketing Presentation Marketing PresentationRosal Mark JovenОценок пока нет
- Verilog A Model To CadenceДокумент56 страницVerilog A Model To CadenceJamesОценок пока нет
- 353 Version 7thДокумент1 страница353 Version 7thDuc NguyenОценок пока нет
- Preliminary Examination The Contemporary WorldДокумент2 страницыPreliminary Examination The Contemporary WorldJane M100% (1)
- Adding and Subtracting FractionsДокумент4 страницыAdding and Subtracting Fractionsapi-508898016Оценок пока нет
- Crusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabДокумент3 страницыCrusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabErika CalistroОценок пока нет
- PPT-QC AcДокумент34 страницыPPT-QC AcAmlan Chakrabarti Calcutta UniversityОценок пока нет
- Piping Class Spec. - 1C22 (Lurgi)Документ9 страницPiping Class Spec. - 1C22 (Lurgi)otezgidenОценок пока нет
- PRINCIPLES OF TEACHING NotesДокумент24 страницыPRINCIPLES OF TEACHING NotesHOLLY MARIE PALANGAN100% (2)
- Assignment & Case Marketing Week 1: Max Van Neerven: 1664172 Mounir Trabelsi: 1705839 Renaldas Zlatkus: 1701775Документ8 страницAssignment & Case Marketing Week 1: Max Van Neerven: 1664172 Mounir Trabelsi: 1705839 Renaldas Zlatkus: 1701775Ren ZkОценок пока нет
- ACTIX Basic (Sample CDMA)Документ73 страницыACTIX Basic (Sample CDMA)radhiwibowoОценок пока нет
- Name of The Business-Rainbow Blooms LLC. Executive SummaryДокумент17 страницName of The Business-Rainbow Blooms LLC. Executive SummaryAhamed AliОценок пока нет
- History of Drilling PDFДокумент9 страницHistory of Drilling PDFNguyen Van TinhОценок пока нет
- Editor Attach 1327138073 1832Документ59 страницEditor Attach 1327138073 1832Monther Al DebesОценок пока нет
- R, Axn: Housingand RegulatoryДокумент5 страницR, Axn: Housingand RegulatoryAce RamosoОценок пока нет
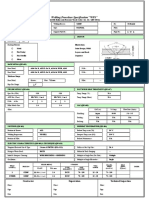
- Wps For Carbon Steel THK 7.11 GtawДокумент1 страницаWps For Carbon Steel THK 7.11 GtawAli MoosaviОценок пока нет
- NCPДокумент6 страницNCPJoni Lyn Ba-as BayengОценок пока нет
- Sheet (8) Synchronous Machine Problem (1) :: SolutionДокумент5 страницSheet (8) Synchronous Machine Problem (1) :: Solutionمكاريوس عيادОценок пока нет
- Hatayoga 1Документ11 страницHatayoga 1SACHIDANANDA SОценок пока нет
- EvolutionCombatMedic 2022Документ17 страницEvolutionCombatMedic 2022smith.kevin1420344100% (1)
- Case Study Managerial EconomicsДокумент4 страницыCase Study Managerial EconomicsZaza Afiza100% (1)
- PMDG 737NGX Tutorial 2 PDFДокумент148 страницPMDG 737NGX Tutorial 2 PDFMatt HenryОценок пока нет
- Exercise-3 (B) : Linear EquationsДокумент3 страницыExercise-3 (B) : Linear EquationsVRUSHABHОценок пока нет
- DLL in Health 7 3rd QuarterДокумент2 страницыDLL in Health 7 3rd QuarterJuna Lyn Hermida ArellonОценок пока нет
- Geopolymer Book Chapter1 PDFДокумент37 страницGeopolymer Book Chapter1 PDFDick ManОценок пока нет
- Jaiib QpapersДокумент250 страницJaiib Qpapersjaya htОценок пока нет
- Alto Hotel Melbourne GreenДокумент2 страницыAlto Hotel Melbourne GreenShubham GuptaОценок пока нет
- Work Permits New Guideline Amendments 2021 23.11.2021Документ7 страницWork Permits New Guideline Amendments 2021 23.11.2021Sabrina BrathwaiteОценок пока нет
- دور أخلاقيات الأعمال في تحسين أداء المنظماتДокумент14 страницدور أخلاقيات الأعمال في تحسين أداء المنظماتChaima LaifaОценок пока нет
- Context in TranslationДокумент23 страницыContext in TranslationRaluca FloreaОценок пока нет