Вам также может понравиться
- Thermal Rehabilitation (Azuma House)Документ47 страницThermal Rehabilitation (Azuma House)Haseeb Uz Zaman67% (6)
- Manual Offset RDCДокумент3 страницыManual Offset RDCAnthonyОценок пока нет
- SD Servo Driver Detail ManualДокумент67 страницSD Servo Driver Detail ManualAmaury OrtegaОценок пока нет
- Dinamove VerlindeДокумент9 страницDinamove Verlindehubert patiño monroy100% (1)
- Eixo Transmissao e Polia Conjunto 84MM (Wynn Marine PN 1588-009-117) PDFДокумент44 страницыEixo Transmissao e Polia Conjunto 84MM (Wynn Marine PN 1588-009-117) PDFAugusto RezendeОценок пока нет
- Elau SX-1 Servo DriveДокумент170 страницElau SX-1 Servo Driveanon_6032832230% (1)
- NC Studio User Manual enДокумент117 страницNC Studio User Manual enAdeng Esteibar60% (5)
- Ball Screw TutorialДокумент73 страницыBall Screw TutorialIvan Aryo ZaoldyeckОценок пока нет
- Microbiologia AmbientalДокумент389 страницMicrobiologia AmbientalLaura Bosco100% (1)
- ALPHA I Servo Motors SpecificationsДокумент16 страницALPHA I Servo Motors SpecificationsCarlos PОценок пока нет
- NV10Документ39 страницNV10Marian BaciuОценок пока нет
- B800-1 ManualEДокумент35 страницB800-1 ManualESLAMET PAMBUDIОценок пока нет
- Overgangsliste Fra Compact NS Til NSXДокумент48 страницOvergangsliste Fra Compact NS Til NSXKais AbichouОценок пока нет
- ALPHA6000 Series General Purpose AC DriveДокумент12 страницALPHA6000 Series General Purpose AC DriveRoberto Manzanares MtzОценок пока нет
- SB150 User's Manual B.1Документ77 страницSB150 User's Manual B.1Eka PratamaОценок пока нет
- Manual - Drive - Is7 - ENG - KOR - Pulse Encoder Option PDFДокумент22 страницыManual - Drive - Is7 - ENG - KOR - Pulse Encoder Option PDFFadFadОценок пока нет
- Manual Micro B Net DigitalДокумент146 страницManual Micro B Net DigitalingegusОценок пока нет
- XGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFДокумент1 322 страницыXGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFJaka SimonicОценок пока нет
- PRONET User Manual V1Документ88 страницPRONET User Manual V1Tülay Mutlu100% (1)
- Product Summary:: PD194E-9S4Документ3 страницыProduct Summary:: PD194E-9S4wildpere50% (2)
- NPM Motion Control Serial Communication CatalogДокумент24 страницыNPM Motion Control Serial Communication CatalogElectromateОценок пока нет
- Altec: TC818 Tension Controller Instruction Manual (V4.00)Документ42 страницыAltec: TC818 Tension Controller Instruction Manual (V4.00)Rezky YudesilkyОценок пока нет
- TL Veichi AC60Документ43 страницыTL Veichi AC60Dương Quốc Thái100% (1)
- A Series Temperature Controller Instruction Sheet: SpecificationsДокумент2 страницыA Series Temperature Controller Instruction Sheet: SpecificationsGupteswara Satapathy0% (2)
- DKG 114 User PDFДокумент9 страницDKG 114 User PDFangel aguilarОценок пока нет
- Aj Power Ats Panels Handbook-En-rev3Документ44 страницыAj Power Ats Panels Handbook-En-rev3Fernando QuisberthОценок пока нет
- Topmark MaximДокумент164 страницыTopmark Maxim55583550% (2)
- Data Sheet Fozmula TLL70 Fozmula Vertical Float SwitchДокумент1 страницаData Sheet Fozmula TLL70 Fozmula Vertical Float SwitchmanuelbeasОценок пока нет
- Inverter FMZ Main Motor & Roll BelakangДокумент1 страницаInverter FMZ Main Motor & Roll Belakangsteve yamamotoОценок пока нет
- Puente GruaДокумент2 страницыPuente GruaAbel Valderrama PerezОценок пока нет
- Altivar 31 - ATV31HU40N4AДокумент3 страницыAltivar 31 - ATV31HU40N4Avendas.ilimitadasОценок пока нет
- Speed Control of 3 Phase Induction MotorДокумент10 страницSpeed Control of 3 Phase Induction MotorK.R.RaguramОценок пока нет
- Nippon Pulse 2011 CatalogДокумент98 страницNippon Pulse 2011 CatalogElectromateОценок пока нет
- Specifications & Lifting Capacities: Hydraulic Crawler CraneДокумент44 страницыSpecifications & Lifting Capacities: Hydraulic Crawler CraneNgọc Tân100% (1)
- Load Cell Controller (Sh-1000b Manual (En) )Документ25 страницLoad Cell Controller (Sh-1000b Manual (En) )김성화Оценок пока нет
- Energy 400Документ58 страницEnergy 400fv740% (1)
- Experiment # 6 Serial Adder: 1-IntroductionДокумент3 страницыExperiment # 6 Serial Adder: 1-Introductionzx1_12Оценок пока нет
- CHTDBДокумент2 763 страницыCHTDBFredericks DiazОценок пока нет
- Alpha 6000 Series General Purpose Ac Drive PDFДокумент12 страницAlpha 6000 Series General Purpose Ac Drive PDFGaurav NandaОценок пока нет
- 8-Bit Single-Chip Microcomputer With Ad Converter D78c10agq Nec Datasheet PDFДокумент66 страниц8-Bit Single-Chip Microcomputer With Ad Converter D78c10agq Nec Datasheet PDFAnonymous qWeFIfN90Оценок пока нет
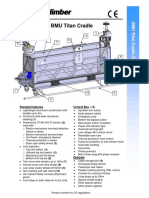
- BMU Titan Cradle: Standard Features Control BoxДокумент2 страницыBMU Titan Cradle: Standard Features Control BoxKashyapОценок пока нет
- AP InverterДокумент100 страницAP InvertermichaelsetiawnОценок пока нет
- Electrique Wood Mizzer lt15Документ8 страницElectrique Wood Mizzer lt15David Ansanay100% (2)
- LG 22lk230-Ta Chassis lp92r mfl62298310 1107-Rev00 PDFДокумент36 страницLG 22lk230-Ta Chassis lp92r mfl62298310 1107-Rev00 PDFCletoОценок пока нет
- User Manual For SA Series: Smart & AccurateДокумент133 страницыUser Manual For SA Series: Smart & AccurateJean GrimОценок пока нет
- Crane Packing ListДокумент2 страницыCrane Packing Listmanas3sОценок пока нет
- LG VFDДокумент38 страницLG VFDDenuj jouОценок пока нет
- Specifications GeneratorДокумент7 страницSpecifications GeneratorMicky Yuedhy TangkeyОценок пока нет
- Slip Power Recovery SchemeДокумент19 страницSlip Power Recovery SchemeISL EEE HODОценок пока нет
- LE3u 56MR ManualДокумент17 страницLE3u 56MR ManualJoão ArtilheiroОценок пока нет
- Siemens Simatic S7-300 SM338 6ES7338-4BC00 - 0AB0 Positioning Module PDFДокумент2 страницыSiemens Simatic S7-300 SM338 6ES7338-4BC00 - 0AB0 Positioning Module PDFmicaОценок пока нет
- LG SV004iG5A ManualДокумент178 страницLG SV004iG5A ManualdinhvanbkОценок пока нет
- Prostar PR7000Документ67 страницProstar PR7000Amir ZeidabadiОценок пока нет
- UNIX-1 PLC - Compact: FeaturesДокумент2 страницыUNIX-1 PLC - Compact: FeaturesRonak Patel100% (1)
- RCI 510 System SkyAzul Engl.. 3 PDFДокумент2 страницыRCI 510 System SkyAzul Engl.. 3 PDFTom WilberОценок пока нет
- 7mbi100u4s 120B 54Документ1 страница7mbi100u4s 120B 54SLAMET PAMBUDI0% (1)
- Asco 5110 ManualДокумент8 страницAsco 5110 ManualMd ShОценок пока нет
- Auto K 400 / 600: Thyristorised Power Sources For MIG / MAG WeldingДокумент2 страницыAuto K 400 / 600: Thyristorised Power Sources For MIG / MAG WeldingMohit TyagiОценок пока нет
- 20120224043147Документ8 страниц20120224043147Dương Trương Tấn100% (1)
- Lo-Cog DC Servo Motors: Series 8000Документ20 страницLo-Cog DC Servo Motors: Series 8000papaandiОценок пока нет
- Pittman GM9236S027Документ0 страницPittman GM9236S027Nicola's SacОценок пока нет
- Pittman GM8724S023Документ0 страницPittman GM8724S023Gustavo Gonzáles AlvitesОценок пока нет
- AEROTECH Motor1210Документ13 страницAEROTECH Motor1210zhen yongjieОценок пока нет
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОт EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОценок пока нет
- User Manual 2120851Документ24 страницыUser Manual 2120851Oscar Vazquez EspinosaОценок пока нет
- Instruction ManualДокумент245 страницInstruction ManualOscar Vazquez Espinosa100% (1)
- Automatic Sliding Door Retrofit Drive Assembly Installation ManualДокумент19 страницAutomatic Sliding Door Retrofit Drive Assembly Installation ManualOscar Vazquez EspinosaОценок пока нет
- Instruction ManualДокумент245 страницInstruction ManualOscar Vazquez Espinosa100% (1)
- Automatic Sliding Door Retrofit Drive Assembly Installation ManualДокумент19 страницAutomatic Sliding Door Retrofit Drive Assembly Installation ManualOscar Vazquez EspinosaОценок пока нет
- New ProjectДокумент1 страницаNew ProjectOscar Vazquez EspinosaОценок пока нет
- GPS Com Port Command User ManualДокумент3 страницыGPS Com Port Command User Manualnestorluis10Оценок пока нет
- Automatizacion de SistemaДокумент6 страницAutomatizacion de SistemaOscar Vazquez EspinosaОценок пока нет
- Learning PID Structures in An Introductory Course of Automatic ControlДокумент4 страницыLearning PID Structures in An Introductory Course of Automatic ControlOscar Vazquez EspinosaОценок пока нет
- Servo FundamentalsДокумент12 страницServo FundamentalsMohanraj SelvakumarОценок пока нет
- PID NO Lineal PDFДокумент8 страницPID NO Lineal PDFOscar Vazquez EspinosaОценок пока нет
- User Manual of DS-7100-SL&SH and DS-7200HI-SL Series DVRДокумент155 страницUser Manual of DS-7100-SL&SH and DS-7200HI-SL Series DVROscar Vazquez EspinosaОценок пока нет
- ControlRobusto BUCK-BOOST PDFДокумент14 страницControlRobusto BUCK-BOOST PDFOscar Vazquez EspinosaОценок пока нет
- Automatizacion de SistemaДокумент6 страницAutomatizacion de SistemaOscar Vazquez EspinosaОценок пока нет
- Quick Operation Guide of DS-7100-SL SH&DS-7200HI-SL Series DVR PDFДокумент16 страницQuick Operation Guide of DS-7100-SL SH&DS-7200HI-SL Series DVR PDFOscar Vazquez EspinosaОценок пока нет
- Tuning Pid ControllerДокумент8 страницTuning Pid Controllergan_raoОценок пока нет
- 20 Unbelievable Arduino ProjectsДокумент430 страниц20 Unbelievable Arduino ProjectsCao Anh100% (10)
- Show Page - HTML Page Quick Result PDFДокумент1 страницаShow Page - HTML Page Quick Result PDFOscar Vazquez EspinosaОценок пока нет
- B.C Kuo Solutions 1Документ947 страницB.C Kuo Solutions 1simply_tom100% (5)
- User Manual of DS-7100-SL&SH and DS-7200HI-SL Series DVRДокумент155 страницUser Manual of DS-7100-SL&SH and DS-7200HI-SL Series DVROscar Vazquez EspinosaОценок пока нет
- GPS102-B User Manual-2013-11-5Документ19 страницGPS102-B User Manual-2013-11-5Oscar Vazquez EspinosaОценок пока нет
- Gps103ab User Manual-20130726Документ33 страницыGps103ab User Manual-20130726Igor TrimcevskiОценок пока нет
- Arduinoio Ug BookДокумент132 страницыArduinoio Ug BookOscar Vazquez EspinosaОценок пока нет
- Ball Screw Catalogue PDFДокумент16 страницBall Screw Catalogue PDFOscar Vazquez EspinosaОценок пока нет
- A12 ManualДокумент65 страницA12 ManualOscar Vazquez EspinosaОценок пока нет
- Selection PaP1 1Документ32 страницыSelection PaP1 1RofochoОценок пока нет
- Maquina CNC Con Todas Sus MedidasДокумент54 страницыMaquina CNC Con Todas Sus MedidasUlisses FabianoОценок пока нет
- Ethylene Glycol Heat-Transfer FluidДокумент4 страницыEthylene Glycol Heat-Transfer Fluidashif28Оценок пока нет
- 03 Item 220 (Salwico NS-AOHS) Incl 221 and 222Документ3 страницы03 Item 220 (Salwico NS-AOHS) Incl 221 and 222AlexDorОценок пока нет
- Manufacturing ProcessДокумент42 страницыManufacturing ProcesssuganyaОценок пока нет
- Project Maagement Term PaperДокумент3 страницыProject Maagement Term PaperMarwa Kazi Mohammed100% (1)
- Ucarsol LEДокумент3 страницыUcarsol LEharry_chemОценок пока нет
- Kongsberg The Full Picture Magazine 1 16Документ100 страницKongsberg The Full Picture Magazine 1 16LifeatseaОценок пока нет
- EC210D Filter & Oil CapacityДокумент3 страницыEC210D Filter & Oil CapacityAndri AnwarОценок пока нет
- Mechanical Operation Slurry TransportДокумент113 страницMechanical Operation Slurry TransportIsrarulHaqueОценок пока нет
- 14.03 - General Design - Design of Steel Bridges BD 13-90Документ27 страниц14.03 - General Design - Design of Steel Bridges BD 13-90Oscar MendozaОценок пока нет
- PTI Section 4 Transistors PDFДокумент36 страницPTI Section 4 Transistors PDFchrist9088Оценок пока нет
- Our Technology Background Framo Cargo Pumping SystemДокумент199 страницOur Technology Background Framo Cargo Pumping SystemSorescu Radu VasileОценок пока нет
- Daily Activities Report Maintenance Baru Gas Plant & Teluk Lembu Delivery StationДокумент30 страницDaily Activities Report Maintenance Baru Gas Plant & Teluk Lembu Delivery StationMaintenance BentuОценок пока нет
- TB01200003EДокумент132 страницыTB01200003EJohn LorenzoОценок пока нет
- PVC BendingДокумент6 страницPVC BendingFrancis Al Maghanoy GabisonОценок пока нет
- Split Phase LV5048Документ1 страницаSplit Phase LV5048A CermenoОценок пока нет
- Pump Head CalculationДокумент6 страницPump Head CalculationSHANTANU PATHAKОценок пока нет
- The Greening of Wal Mart's Supply ChainДокумент8 страницThe Greening of Wal Mart's Supply ChainmuputismОценок пока нет
- DS CatalogueДокумент6 страницDS CatalogueDMA ASIAОценок пока нет
- Analogue Addressable Repeater - MFAREP Fire Detection SystemДокумент20 страницAnalogue Addressable Repeater - MFAREP Fire Detection SystemShadi AbdelsalamОценок пока нет
- Lect 2Документ25 страницLect 2Mahmoud El-MahdyОценок пока нет
- Unit ConversionДокумент21 страницаUnit ConversioninsidereaderОценок пока нет
- The National Research Council of The PhilippinesДокумент4 страницыThe National Research Council of The PhilippinesJohn Henry Lucayon TenorioОценок пока нет
- 24" (61 CM) Electric Single and Double Built-In Oven: Product Model Series Overall DimensionsДокумент1 страница24" (61 CM) Electric Single and Double Built-In Oven: Product Model Series Overall DimensionsHewa PCОценок пока нет
- Rame ProfileДокумент6 страницRame Profiletri_purwadiОценок пока нет
- Electrolysis Plant Size Optimization and Benefit Analysis of A Far Offshore Wind-Hydrogen System Based On Information Gap Decision Theory and Chance Constraints ProgrammingДокумент13 страницElectrolysis Plant Size Optimization and Benefit Analysis of A Far Offshore Wind-Hydrogen System Based On Information Gap Decision Theory and Chance Constraints ProgrammingHumberto van OolОценок пока нет
- GLA100Документ2 страницыGLA100Al De LeonОценок пока нет
- Catalogue Bzi GBДокумент15 страницCatalogue Bzi GBdenis_alexОценок пока нет
- Bye Bye Blue Sky - Documentary by Patrick PasinДокумент52 страницыBye Bye Blue Sky - Documentary by Patrick PasinThought HackerОценок пока нет