Вам также может понравиться
- Mof+ +alicorpДокумент42 страницыMof+ +alicorpRicardo Jiménez100% (1)
- T2 MII-U2-Actividad 2.solución de ProblemasДокумент2 страницыT2 MII-U2-Actividad 2.solución de Problemasdhoser20830% (1)
- Formato de Word de Expediente TecnicoДокумент5 страницFormato de Word de Expediente TecnicoElevit Joel Rodas Valverde100% (1)
- Enriquecimiento Mate 3 EpДокумент2 страницыEnriquecimiento Mate 3 EpGhandaОценок пока нет
- Nut Rici On Enlai RCДокумент10 страницNut Rici On Enlai RCAntonio127Оценок пока нет
- Biofsica-Unidad 1 Matemtica-Versin 1.0Документ61 страницаBiofsica-Unidad 1 Matemtica-Versin 1.0Edgar OrtizОценок пока нет
- Oae Acreditacion de LaboratoriosДокумент12 страницOae Acreditacion de Laboratoriosjorge_t_71Оценок пока нет
- Cinco Rubros para Calcular Los Costos de Tu ProyectoДокумент1 страницаCinco Rubros para Calcular Los Costos de Tu ProyectoJuanfausto LopezlopezОценок пока нет
- CVS EclipseДокумент6 страницCVS EclipsecuneonicolasОценок пока нет
- SEMANA 3 - Tablero de Distribución Monofásica, Interruptores DiferencialesДокумент16 страницSEMANA 3 - Tablero de Distribución Monofásica, Interruptores DiferencialesFidelОценок пока нет
- 58.-Examen Tercer Grado. Star Leyva. Star Creando.Документ13 страниц58.-Examen Tercer Grado. Star Leyva. Star Creando.Andy_priceОценок пока нет
- Documento Resumen 4Документ8 страницDocumento Resumen 4Neowancis Perez OgandoОценок пока нет
- Coaching Organizacional Tarea 7Документ8 страницCoaching Organizacional Tarea 7Daniel CoronadoОценок пока нет
- Qué Es El Pensamiento LateralДокумент5 страницQué Es El Pensamiento LateralJhon Alexander Lagos IpuzОценок пока нет
- Representamos Cantidades Usando Sus EquivalenciasДокумент2 страницыRepresentamos Cantidades Usando Sus EquivalenciasGabriela Laos GonzalesОценок пока нет
- Antecedentes Libertarios de Negros y PardosДокумент14 страницAntecedentes Libertarios de Negros y PardosmobettymaОценок пока нет
- Dialnet LasConductasSexualesDeRiesgoDeLosAdolescentesEspan 4724676 PDFДокумент24 страницыDialnet LasConductasSexualesDeRiesgoDeLosAdolescentesEspan 4724676 PDFIgnacio Muñoz-Torrero ManchadoОценок пока нет
- Emular Aladdin HASP HLДокумент3 страницыEmular Aladdin HASP HLeospin100% (1)
- La CulturaДокумент79 страницLa CulturaYasna Carpio100% (1)
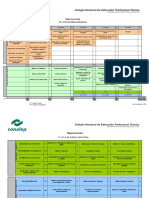
- Mapa Curricular Quimica IndustrialДокумент2 страницыMapa Curricular Quimica IndustrialGerard JuarezОценок пока нет
- Sabato, JorgeДокумент16 страницSabato, JorgeFany OrdoñezОценок пока нет
- Marco Teórico Proyectos Socio Productivos PSPДокумент6 страницMarco Teórico Proyectos Socio Productivos PSPchinjoda50% (4)
- Taller Estrategias Cognitivas y Metacognitivas de La Lectura.Документ10 страницTaller Estrategias Cognitivas y Metacognitivas de La Lectura.KELLY JOHANA URANGO HERNANDEZОценок пока нет
- Udx042030137 U3 Aa2Документ10 страницUdx042030137 U3 Aa2Edgar RiosОценок пока нет
- MANUAL LABORATORIO PAVIMENTOS Borrador-1 I. VILLEGAS PDFДокумент75 страницMANUAL LABORATORIO PAVIMENTOS Borrador-1 I. VILLEGAS PDFManuel JcОценок пока нет
- Latl U2 A1 XxyzДокумент4 страницыLatl U2 A1 Xxyzedgar0% (2)
- Aclimatacion PapayaДокумент7 страницAclimatacion PapayaBret LZОценок пока нет
- HPLC5 26122Документ35 страницHPLC5 26122Ana GalvezОценок пока нет
- Taller Número 5 - MaterialesДокумент2 страницыTaller Número 5 - MaterialesLaura Vanessa Niño AlvarezОценок пока нет