Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Ad Guard DNSДокумент867 страницAd Guard DNSDaniel RafaelОценок пока нет
- TGA 33.360 6x4 BBДокумент4 страницыTGA 33.360 6x4 BBOlfa Soudani100% (1)
- EEG Amplifier Development BoardДокумент27 страницEEG Amplifier Development BoardHaseeb Ur RehmanОценок пока нет
- KeralaДокумент514 страницKeralaGayathriОценок пока нет
- Elwave ManualДокумент109 страницElwave ManualNo Name100% (1)
- Nursing Informatics 2018Документ66 страницNursing Informatics 2018Undher Ground Maker100% (5)
- Prusa I3 Config ManualДокумент27 страницPrusa I3 Config Manualoferamal9562Оценок пока нет
- What Is Torque?: SearchДокумент5 страницWhat Is Torque?: Searchoferamal9562Оценок пока нет
- Continuous Belt WeighingДокумент20 страницContinuous Belt WeighingFajar Zona100% (1)
- Ad Converters TeoriДокумент21 страницаAd Converters Teorioferamal9562Оценок пока нет
- LabVIEW Quick Reference Card - 373353bДокумент4 страницыLabVIEW Quick Reference Card - 373353boferamal9562Оценок пока нет
- labVIEW y ExcelДокумент5 страницlabVIEW y Exceloferamal9562Оценок пока нет
- CourseOfferingPlanGradF18 S20 20180106Документ9 страницCourseOfferingPlanGradF18 S20 20180106Anshum PalОценок пока нет
- Knowledge 1Документ1 страницаKnowledge 1benciusilviuОценок пока нет
- Beyblade Burst Scanning InstructionsДокумент1 страницаBeyblade Burst Scanning InstructionsJagan SathishОценок пока нет
- WI - RRC CS Failure RateДокумент3 страницыWI - RRC CS Failure Ratefidele50% (2)
- Regional Memo No. 058 S. 2022 Call For Proposals and Interim Guidelines For Basic Education Research Fund 2022 1Документ40 страницRegional Memo No. 058 S. 2022 Call For Proposals and Interim Guidelines For Basic Education Research Fund 2022 1Maestra Ligaya Maria YojОценок пока нет
- Tiny PPT198Документ2 страницыTiny PPT198HerlinaОценок пока нет
- JNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsДокумент1 страницаJNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsHarsha NerlapalleОценок пока нет
- UMC Series - Driver ReadMe - 2019 04 02 PDFДокумент3 страницыUMC Series - Driver ReadMe - 2019 04 02 PDFLeo Do Monte0% (1)
- What Is SAP R/3?Документ35 страницWhat Is SAP R/3?jitinmangla970Оценок пока нет
- Creating Quiz in Google ClassroomДокумент39 страницCreating Quiz in Google ClassroomPyin Nyar Aung MyayОценок пока нет
- Lec6 QP IndexingДокумент40 страницLec6 QP IndexingPrevizslaОценок пока нет
- The GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsДокумент8 страницThe GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsJesús UrrietaОценок пока нет
- Chapter Seven Capacitors and InductorsДокумент10 страницChapter Seven Capacitors and InductorsVimala ElumalaiОценок пока нет
- Oracle Database Disaster Recovery Using Dell Storage Replication SolutionsДокумент25 страницOracle Database Disaster Recovery Using Dell Storage Replication SolutionsvivekОценок пока нет
- DBC 1550nm EdfaДокумент3 страницыDBC 1550nm EdfasonyОценок пока нет
- Intelligent Addressable Fire Alarm System: GeneralДокумент10 страницIntelligent Addressable Fire Alarm System: Generaleduardo gonzalezavОценок пока нет
- Information Sciences: Decui Liang, Bochun YiДокумент18 страницInformation Sciences: Decui Liang, Bochun YiRico Bayu WiranataОценок пока нет
- 3.4.4 Lab - Research Networking StandardsДокумент5 страниц3.4.4 Lab - Research Networking StandardsCT KHОценок пока нет
- Being Pwer and Powerless - Hmnties & SCL Scncs ReviewsДокумент106 страницBeing Pwer and Powerless - Hmnties & SCL Scncs Reviewslukas222Оценок пока нет
- PMS ReportДокумент51 страницаPMS ReportMalavika K Murthy50% (2)
- Linear Programming Simple Word ProblemsДокумент2 страницыLinear Programming Simple Word ProblemsWendy Millheiser Menard0% (1)
- Solutions To Selected Problems-Duda, HartДокумент12 страницSolutions To Selected Problems-Duda, HartTiep VuHuu67% (3)
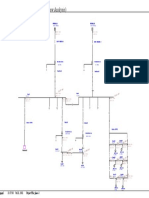
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVДокумент1 страницаOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderОценок пока нет
- VTAM 4R2 Early User ExperiencesДокумент248 страницVTAM 4R2 Early User Experiencesgborja8881331Оценок пока нет