Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Toyota 21R, 22R, 22RC Engine Repair Manual (1980.08) (Pub No. 36056E)Документ283 страницыToyota 21R, 22R, 22RC Engine Repair Manual (1980.08) (Pub No. 36056E)Master Xeoto100% (4)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Freelance Contract TemplateДокумент7 страницFreelance Contract TemplateAkhil PCОценок пока нет
- MCQДокумент2 страницыMCQebenesarb100% (2)
- One Way Slab DesignДокумент10 страницOne Way Slab DesignBijendra PradhanОценок пока нет
- Assingment 1: B. A Statement of Meeting Minimum RequirementsДокумент2 страницыAssingment 1: B. A Statement of Meeting Minimum RequirementsebenesarbОценок пока нет
- Autoclave 2Документ52 страницыAutoclave 2SILVANA ELIZABETH ROMO ALBUJAОценок пока нет
- Computer Graphics Mini ProjectДокумент25 страницComputer Graphics Mini ProjectGautam Singh78% (81)
- Pedagogy Assignment 1Документ2 страницыPedagogy Assignment 1ebenesarb80% (5)
- Main Aapako Tren Ke Baare Mein Bata Raha HoonДокумент1 страницаMain Aapako Tren Ke Baare Mein Bata Raha HoonebenesarbОценок пока нет
- Unit 1 Combination DerivationДокумент7 страницUnit 1 Combination DerivationebenesarbОценок пока нет
- Brain Teasers PDFДокумент21 страницаBrain Teasers PDFebenesarbОценок пока нет
- Students' Favorite After-College Activities Activity Number of StudentsДокумент2 страницыStudents' Favorite After-College Activities Activity Number of StudentsebenesarbОценок пока нет
- 18BMAI01 Mathematical Statistics I Assignment - IДокумент1 страница18BMAI01 Mathematical Statistics I Assignment - IebenesarbОценок пока нет
- 3.rajadurai Jan2016 Ijaer AsingleserverretrialqueuewithbernoulliworkingvacationandvacationinterruptionДокумент8 страниц3.rajadurai Jan2016 Ijaer AsingleserverretrialqueuewithbernoulliworkingvacationandvacationinterruptionebenesarbОценок пока нет
- IRDP Award 2018-Application FormДокумент3 страницыIRDP Award 2018-Application FormebenesarbОценок пока нет
- Brain TeasersДокумент38 страницBrain TeasersebenesarbОценок пока нет
- QPДокумент10 страницQPebenesarbОценок пока нет
- Brain Teasers PDFДокумент21 страницаBrain Teasers PDFebenesarbОценок пока нет
- Brain Teasers PDFДокумент21 страницаBrain Teasers PDFebenesarbОценок пока нет
- IJARCCE2H S Yeshwanth Fuzzy Logic Based Call Admission Control For Next Generation Wireless NetworksДокумент7 страницIJARCCE2H S Yeshwanth Fuzzy Logic Based Call Admission Control For Next Generation Wireless NetworksebenesarbОценок пока нет
- AnsДокумент2 страницыAnsebenesarbОценок пока нет
- UNIT V Sampling Theory: ParameterДокумент8 страницUNIT V Sampling Theory: ParameterebenesarbОценок пока нет
- Assignment 1 Solution - 5Документ2 страницыAssignment 1 Solution - 5ebenesarbОценок пока нет
- Pedagogy Assignment 2Документ2 страницыPedagogy Assignment 2ebenesarbОценок пока нет
- Pedagogy Assignment 3Документ3 страницыPedagogy Assignment 3ebenesarb0% (1)
- AssignmentДокумент5 страницAssignmentebenesarbОценок пока нет
- Assignment 2Документ3 страницыAssignment 2ebenesarbОценок пока нет
- Final Score of Outcome Based Pedagogic Principles For Effective TeachingДокумент14 страницFinal Score of Outcome Based Pedagogic Principles For Effective TeachingebenesarbОценок пока нет
- IRDP Award 2018-Application FormДокумент3 страницыIRDP Award 2018-Application FormebenesarbОценок пока нет
- Assignment 2 SolutionДокумент3 страницыAssignment 2 SolutionebenesarbОценок пока нет
- Pent Fuzzy NoДокумент6 страницPent Fuzzy NoebenesarbОценок пока нет
- Unit - V Design of ExperimentsДокумент9 страницUnit - V Design of ExperimentsebenesarbОценок пока нет
- Mat Lab T ReportДокумент1 страницаMat Lab T ReportebenesarbОценок пока нет
- SolutionДокумент2 страницыSolutionebenesarbОценок пока нет
- Ad VДокумент1 страницаAd VebenesarbОценок пока нет
- Eudemon8000E XДокумент2 страницыEudemon8000E XGladys Medina100% (1)
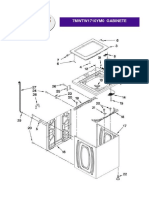
- 7MWTW1710YM0Документ8 страниц7MWTW1710YM0Izack-Dy JimZitОценок пока нет
- Learning Activity Sheet Science 10 Second Quarter - Week 8Документ4 страницыLearning Activity Sheet Science 10 Second Quarter - Week 8Eller Jansen AnciroОценок пока нет
- New York State - NclexДокумент5 страницNew York State - NclexBia KriaОценок пока нет
- HyderabadДокумент3 страницыHyderabadChristoОценок пока нет
- Visa Requirements Austrian EmbassyДокумент2 страницыVisa Requirements Austrian Embassyadalcayde2514Оценок пока нет
- Unit 1: Exercise 1: Match The Words With The Pictures. Use The Words in The BoxДокумент9 страницUnit 1: Exercise 1: Match The Words With The Pictures. Use The Words in The BoxĐoàn Văn TiếnОценок пока нет
- Setup LogДокумент221 страницаSetup LogCarlos MendezОценок пока нет
- Charts & Publications: Recommended Retail Prices (UK RRP)Документ3 страницыCharts & Publications: Recommended Retail Prices (UK RRP)KishanKashyapОценок пока нет
- Module 2 Lesson 2 Communication and TechnologyДокумент7 страницModule 2 Lesson 2 Communication and TechnologyClarence EscopeteОценок пока нет
- DTDC Rate Quotation-4Документ3 страницыDTDC Rate Quotation-4Ujjwal Sen100% (1)
- Che 342 Practice Set I IДокумент4 страницыChe 342 Practice Set I IDan McОценок пока нет
- CRITERIA-GuideRail & Median BarriersДокумент15 страницCRITERIA-GuideRail & Median BarriersMartbenОценок пока нет
- Business English Question PaperДокумент4 страницыBusiness English Question PaperKhizra AliОценок пока нет
- Psychological Attitude Towards SafetyДокумент17 страницPsychological Attitude Towards SafetyAMOL RASTOGI 19BCM0012Оценок пока нет
- Course Syllabus: Ecommerce & Internet MarketingДокумент23 страницыCourse Syllabus: Ecommerce & Internet MarketingMady RamosОценок пока нет
- DataBase Management Systems SlidesДокумент64 страницыDataBase Management Systems SlidesMukhesh InturiОценок пока нет
- Integrated Recycling Systems: Harris Complete PackageДокумент4 страницыIntegrated Recycling Systems: Harris Complete PackageNicolás Toro ValenzuelaОценок пока нет
- Order 49Документ14 страницOrder 49NURADRIANA OMAR BAHSIRОценок пока нет
- CS506 Mid SubjectiveДокумент2 страницыCS506 Mid SubjectiveElma AlamОценок пока нет
- Project Report EP-1Документ9 страницProject Report EP-1Nikita NawleОценок пока нет
- TreeSize Professional - Folder Contents of - CДокумент1 страницаTreeSize Professional - Folder Contents of - CHenrique GilОценок пока нет
- About UPSC Civil Service Examination Schedule and Subject ListДокумент4 страницыAbout UPSC Civil Service Examination Schedule and Subject Listjaythakar8887Оценок пока нет
- Corporate Restructuring Companies Amendment Act 2021Документ9 страницCorporate Restructuring Companies Amendment Act 2021Najeebullah KardaarОценок пока нет
- Danais 150 ActuadoresДокумент28 страницDanais 150 Actuadoresedark2009Оценок пока нет