Вам также может понравиться
- Réseaux mobiles et satellitaires: Principes, calculs et simulationsОт EverandRéseaux mobiles et satellitaires: Principes, calculs et simulationsОценок пока нет
- Systèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentОт EverandSystèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentОценок пока нет
- Frame RelayДокумент31 страницаFrame RelayJocelyn Dervain100% (1)
- Reseaux de TerrainДокумент81 страницаReseaux de TerrainDiambra Pierre-marie100% (1)
- Fame Relay 01Документ19 страницFame Relay 01SomeonesokaОценок пока нет
- Cours Le Relais de Trames (Frame Relay) en Détails - Cours Et Formations Informatiques en Ligne !Документ12 страницCours Le Relais de Trames (Frame Relay) en Détails - Cours Et Formations Informatiques en Ligne !Mulenga Chewe100% (2)
- Configuration Frame Relay de Base Avec Mappages StatiquesДокумент3 страницыConfiguration Frame Relay de Base Avec Mappages StatiquesMed Adam0% (2)
- Critères de Qualité Et TypologieДокумент51 страницаCritères de Qualité Et Typologiezitouni20aoutОценок пока нет
- La Gestion Des Réseaux Satellites de Type VSAT PDFДокумент20 страницLa Gestion Des Réseaux Satellites de Type VSAT PDFcheikso100% (1)
- Présentation de La SnelДокумент14 страницPrésentation de La SnelJean Baptiste nkongoloОценок пока нет
- Chap0 Intro SystemesIntelligentsДокумент29 страницChap0 Intro SystemesIntelligentsJairus EhkalboОценок пока нет
- M20-Diagnostic Et Résolution Des ProblèmesДокумент17 страницM20-Diagnostic Et Résolution Des Problèmesessalhi2014Оценок пока нет
- Cours2 Reseaux Locaux PDFДокумент16 страницCours2 Reseaux Locaux PDFHanen ChaibОценок пока нет
- Mmoire Finale GUERROUT 30sep RparДокумент83 страницыMmoire Finale GUERROUT 30sep RparFatimaОценок пока нет
- Plan Du Cours: Module ASI: Architecture Des Systèmes D'informationsДокумент5 страницPlan Du Cours: Module ASI: Architecture Des Systèmes D'informationsAlti AdelОценок пока нет
- Ms Tel BendelhoumДокумент63 страницыMs Tel BendelhoumElecfort AlgerОценок пока нет
- Chap1 2020Документ38 страницChap1 2020Sirine Ben AmorОценок пока нет
- 2018 TH Maudoux Christophe PDFДокумент170 страниц2018 TH Maudoux Christophe PDFKahina AMARAОценок пока нет
- Rapport Sur La Formation Sur La Partie de TélécommunicationДокумент7 страницRapport Sur La Formation Sur La Partie de Télécommunicationmeddou0% (1)
- Les Type Des ReseuxДокумент6 страницLes Type Des ReseuxMį MǿǚОценок пока нет
- Android HalДокумент8 страницAndroid HalImed YehyaouiОценок пока нет
- Rapport ProjetДокумент51 страницаRapport ProjetNabil BoutefОценок пока нет
- Projet Fin Études VF0 - 1Документ95 страницProjet Fin Études VF0 - 1OuraОценок пока нет
- Basics On ATM and MPLSДокумент54 страницыBasics On ATM and MPLSSu MajestadОценок пока нет
- Projet de Fin D'Etude Projet de Fin D'Etudes SДокумент43 страницыProjet de Fin D'Etude Projet de Fin D'Etudes SIbrahima Gueye100% (1)
- Rexel CablesДокумент92 страницыRexel CablesMario SanchezОценок пока нет
- Application Pour La Gestion de - EL AZAMI Yassine - 3516Документ44 страницыApplication Pour La Gestion de - EL AZAMI Yassine - 3516Ahmed Abdou100% (1)
- TDR Cablage ReseauДокумент11 страницTDR Cablage ReseauBertrand KenaoОценок пока нет
- Webinaire#1-Comment Enrichir Votre BI Avec L'analyse en Temps Réel Des CDR Via La Stack ElasticДокумент19 страницWebinaire#1-Comment Enrichir Votre BI Avec L'analyse en Temps Réel Des CDR Via La Stack ElasticYassine LASRIОценок пока нет
- JEE019 Formation Jee Spring MVC Hibernate PDFДокумент2 страницыJEE019 Formation Jee Spring MVC Hibernate PDFCertyouFormationОценок пока нет
- 1 Introduction Base de DonneesДокумент16 страниц1 Introduction Base de Donneesapi-26420184100% (1)
- S 5Документ10 страницS 5Yosra Gassara Kraiem100% (1)
- Optimisation Du Reseau 3G en Correlation Avec Les Statistiques Et Les KPI SДокумент92 страницыOptimisation Du Reseau 3G en Correlation Avec Les Statistiques Et Les KPI SAlexandre AyehОценок пока нет
- Mémoire AHOULIMI B - Version 2.0 - Review1Документ65 страницMémoire AHOULIMI B - Version 2.0 - Review1Athanase Kampatiba DjagbaОценок пока нет
- Service ToIP Avec Asterisk Pour L'université de BéjaiaДокумент99 страницService ToIP Avec Asterisk Pour L'université de BéjaiaLandry AnongОценок пока нет
- (ENG) - Herve - VHDL AmsДокумент139 страниц(ENG) - Herve - VHDL AmsAmruth Thelkar100% (1)
- Inventaire CompetencesДокумент40 страницInventaire CompetencesCocoOlivier100% (1)
- Cours Appli Emb MobilesДокумент21 страницаCours Appli Emb Mobileslagrange27 lagrangeОценок пока нет
- Charte Informatique 2021-2022Документ2 страницыCharte Informatique 2021-2022ES ChaymaaОценок пока нет
- Pfemoustapha Marwana Abdoumostafa BoumlikДокумент142 страницыPfemoustapha Marwana Abdoumostafa BoumlikfolioОценок пока нет
- Normes 4G: Génération Des Standards Pour La Téléphonie Mobile. Elle Est Le Successeur de LaДокумент4 страницыNormes 4G: Génération Des Standards Pour La Téléphonie Mobile. Elle Est Le Successeur de LaSuley PatersonОценок пока нет
- Proposition Dune Extension Pour Le Module Gestion de La Flotte AutomobileДокумент57 страницProposition Dune Extension Pour Le Module Gestion de La Flotte AutomobileJsganeОценок пока нет
- CCTP CablageДокумент28 страницCCTP CablageEric DoutreleauОценок пока нет
- Licence Professionnelle Méthodes Informatiques Pour Le Génie de La LogistiqueДокумент2 страницыLicence Professionnelle Méthodes Informatiques Pour Le Génie de La LogistiqueITAdmissionОценок пока нет
- SALHI NawelДокумент108 страницSALHI NawelMedvall Ould Med Yehdhih100% (1)
- Internet PMEДокумент121 страницаInternet PMESem Ferdinand KouameОценок пока нет
- Solutions Intelligentes de Gestion Des DéchetsДокумент9 страницSolutions Intelligentes de Gestion Des DéchetsBoudchiche MohammedОценок пока нет
- Chap I - Partie I Généralités Sur Les RCSFДокумент15 страницChap I - Partie I Généralités Sur Les RCSFZoheir AhmedОценок пока нет
- Codes Et TurbocodesДокумент408 страницCodes Et TurbocodesKhalil FatehОценок пока нет
- Docker - Exposé Document FinalДокумент25 страницDocker - Exposé Document FinalIvan ApedoОценок пока нет
- Rapport UmlДокумент19 страницRapport UmlSy SanogoОценок пока нет
- These Omary PDFДокумент139 страницThese Omary PDFNabilОценок пока нет
- Mémoire D'ingénioratДокумент74 страницыMémoire D'ingénioratfialambolyОценок пока нет
- Application de Gestion Et de Réservation Des Salles de TP Informatique - Moncef BENAICHAДокумент61 страницаApplication de Gestion Et de Réservation Des Salles de TP Informatique - Moncef BENAICHADouae IsmailiОценок пока нет
- Cours Sur Téléphonie Fixe-GanaméДокумент37 страницCours Sur Téléphonie Fixe-GanamésowОценок пока нет
- PBX Et Son EvolutionДокумент92 страницыPBX Et Son EvolutionDanra Emmanuel MarcusОценок пока нет
- Chapitre 4 Le Streaming Audio PDFДокумент4 страницыChapitre 4 Le Streaming Audio PDFLahcene ZietОценок пока нет
- Mémoire Fin D'etude TélécommunicationsДокумент101 страницаMémoire Fin D'etude TélécommunicationsAtef EllouzeОценок пока нет
- 532 C 638 F 00402Документ51 страница532 C 638 F 00402rdОценок пока нет
- Extraction et Gestion des Connaissances: Actes de la conférence EGC'2019От EverandExtraction et Gestion des Connaissances: Actes de la conférence EGC'2019Рейтинг: 5 из 5 звезд5/5 (1)
- 3 AutomatesAEtatsFinisДокумент30 страниц3 AutomatesAEtatsFinisassnadОценок пока нет
- Programmation MAGELIS PDFДокумент10 страницProgrammation MAGELIS PDFassnadОценок пока нет
- Epluche PommeДокумент29 страницEpluche PommeassnadОценок пока нет
- Programmation MAGELISДокумент10 страницProgrammation MAGELISassnadОценок пока нет
- Controle Qualité MédicamentДокумент5 страницControle Qualité Médicamentassnad0% (1)
- Guide Schemas Electriques GratuitsДокумент21 страницаGuide Schemas Electriques Gratuitsassnad100% (1)
- QCM ReseauДокумент21 страницаQCM ReseauIsmail MabroukiОценок пока нет
- 03 Switch AvanceДокумент4 страницы03 Switch AvanceJoel BarbaraОценок пока нет
- Exercice 0:: Universite de Thies Ufr Set Dpt. InformatiqueДокумент6 страницExercice 0:: Universite de Thies Ufr Set Dpt. InformatiqueAssane cisse NiassОценок пока нет
- Cours Réseaux InformatiqueДокумент162 страницыCours Réseaux InformatiqueHamza Bensitel0% (1)
- NT00267-FR-01 XFLOW Manuel UtilisateurДокумент124 страницыNT00267-FR-01 XFLOW Manuel UtilisateurChancys MbembaОценок пока нет
- Reseau Informatique PDFДокумент3 страницыReseau Informatique PDFEssozimna LibiluleОценок пока нет
- Reso LanДокумент39 страницReso LanNedra BenletaiefОценок пока нет
- Sujet TP-Reseaux-Sécurité 1Документ3 страницыSujet TP-Reseaux-Sécurité 1stanis kamdoumОценок пока нет
- Seminaire Bus-Industriel CANДокумент98 страницSeminaire Bus-Industriel CANChafik BouguezourОценок пока нет
- BouazizSihem FarezNДокумент123 страницыBouazizSihem FarezNManuel NiatОценок пока нет
- Commande Diagnostique Switch CiscoДокумент6 страницCommande Diagnostique Switch CiscoIbrahima BarryОценок пока нет
- SSL TLSДокумент67 страницSSL TLSafsfddasd50% (2)
- Cours Les Reseaux Locaux Sans Fils 4p PDFДокумент9 страницCours Les Reseaux Locaux Sans Fils 4p PDFaicha GuefrachiОценок пока нет
- Serveur Web Configuration D'un Serveur Apache Sous LinuxДокумент4 страницыServeur Web Configuration D'un Serveur Apache Sous Linuxsouar hamidОценок пока нет
- Configuration Du DMVPN Sur Des Routeurs Cisco 2951Документ12 страницConfiguration Du DMVPN Sur Des Routeurs Cisco 2951Suley Paterson50% (2)
- Présentation 802.11e v1.0Документ35 страницPrésentation 802.11e v1.0Anouar AleyaОценок пока нет
- Architecture Du Sous-Système Multimédia IP: 2.1 Exigences ArchitecturalesДокумент38 страницArchitecture Du Sous-Système Multimédia IP: 2.1 Exigences Architecturalessofiene DachОценок пока нет
- ICND2 Formation Ccna Partie 2 Icnd2 PDFДокумент2 страницыICND2 Formation Ccna Partie 2 Icnd2 PDFCertyouFormationОценок пока нет
- Chapitre 7 - EIGRPДокумент64 страницыChapitre 7 - EIGRPmohamedОценок пока нет
- TMSIR EFF CorrectionДокумент5 страницTMSIR EFF CorrectionMustapha OulcaidОценок пока нет
- Schemas NGN 1Документ8 страницSchemas NGN 1Danra Emmanuel MarcusОценок пока нет
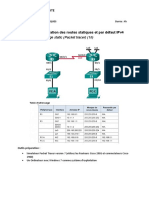
- Configuration de Base Et Routage Rip, Eigrp Et OspfДокумент8 страницConfiguration de Base Et Routage Rip, Eigrp Et Ospfbenji kalegamОценок пока нет
- Les Concepts de Protocoles Et D'algorithmes CryptographiquesДокумент31 страницаLes Concepts de Protocoles Et D'algorithmes CryptographiquesAlpha Oumar DialloОценок пока нет
- Thomson Smart TV 42fu5553 Software UpdateДокумент6 страницThomson Smart TV 42fu5553 Software UpdateMorgan Flint25% (4)
- Protocole Et Service VoIP Septembre 2020 IUC RTДокумент33 страницыProtocole Et Service VoIP Septembre 2020 IUC RTRoland FoyemtchaОценок пока нет
- TD TPДокумент4 страницыTD TPyoyamaОценок пока нет
- Rapport LTEДокумент43 страницыRapport LTELatifa Mokdad100% (6)
- LminiДокумент1 страницаLminikhaoula safsafОценок пока нет
- Ip Multimedia Subsystem IMSДокумент36 страницIp Multimedia Subsystem IMSlahbak abderrahmeneОценок пока нет
- Protocole I.P. Calculs de Sous-RéseauxДокумент5 страницProtocole I.P. Calculs de Sous-RéseauxAhmed MesaudaОценок пока нет