Вам также может понравиться
- Chapter2 (Simple Linear Regression)Документ11 страницChapter2 (Simple Linear Regression)joseph kamwendoОценок пока нет
- Assignment 1: 1 Asymptotic ComplexityДокумент6 страницAssignment 1: 1 Asymptotic ComplexitySuchith PrabhuОценок пока нет
- 4 PDFДокумент18 страниц4 PDFRaviprakash TripathyОценок пока нет
- SummaryДокумент115 страницSummaryTsujio AbeОценок пока нет
- Experiment No 1Документ9 страницExperiment No 1saloni mishraОценок пока нет
- ADALINE Network: AA AA AA A A AДокумент25 страницADALINE Network: AA AA AA A A ARaviprakash TripathyОценок пока нет
- Mukti Linear RegressonДокумент35 страницMukti Linear RegressonD-497 Neha MalviyaОценок пока нет
- Neuron Model and Network ArchitectureДокумент21 страницаNeuron Model and Network Architecturebalamu96mОценок пока нет
- $R1QM8FPДокумент9 страниц$R1QM8FPasdadsОценок пока нет
- Definition of Simple Linear RegressionДокумент9 страницDefinition of Simple Linear RegressiontinkitОценок пока нет
- Fourier Series vs. Fourier Sine Series vs. Fourier Cosine SeriesДокумент6 страницFourier Series vs. Fourier Sine Series vs. Fourier Cosine SeriesDDDDОценок пока нет
- Lecture 26 - Logistic RegressionДокумент4 страницыLecture 26 - Logistic RegressionTBaenasОценок пока нет
- P-N Junction - Electrostatics: E E) DevelopsДокумент20 страницP-N Junction - Electrostatics: E E) DevelopssiddharthОценок пока нет
- PT S2 Multivariable-ShortДокумент22 страницыPT S2 Multivariable-ShortaditОценок пока нет
- In The Name of God: 1 PS#4 - SolutionДокумент4 страницыIn The Name of God: 1 PS#4 - Solutionkimia zargarzadehОценок пока нет
- Ch06 - Further Issues - Ver1Документ39 страницCh06 - Further Issues - Ver1林嘉明Оценок пока нет
- Example 1Документ11 страницExample 1Dr. Maqsood Ahmed KhanОценок пока нет
- Introduction To Deconvolution and InversionДокумент49 страницIntroduction To Deconvolution and InversionHadi HendizadehОценок пока нет
- DigitalCommthr Compiled SumaДокумент68 страницDigitalCommthr Compiled SumaPunith Gowda M BОценок пока нет
- Support Vector Machines: A Simple Tutorial: Alexey NefedovДокумент35 страницSupport Vector Machines: A Simple Tutorial: Alexey NefedovpeptaОценок пока нет
- Manipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentДокумент44 страницыManipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentWajdi SadiqОценок пока нет
- Regression Models: 4.1 Literature ReviewДокумент16 страницRegression Models: 4.1 Literature ReviewBridge Iit At RanchiОценок пока нет
- Widrow-Hoff Learning: (LMS Algorithm)Документ26 страницWidrow-Hoff Learning: (LMS Algorithm)Alee LópezОценок пока нет
- Widrow-Hoff Learning: (LMS Algorithm)Документ26 страницWidrow-Hoff Learning: (LMS Algorithm)Alee LópezОценок пока нет
- Linear Regression Analysis: Module - IiДокумент11 страницLinear Regression Analysis: Module - IinarutoОценок пока нет
- 11.7 Thermodynamics Solution - PremiumДокумент24 страницы11.7 Thermodynamics Solution - PremiumJonathan ParkerОценок пока нет
- Ch10 PresДокумент26 страницCh10 PresMaryam KargaranОценок пока нет
- Simple Regression 1Документ18 страницSimple Regression 1AmirahHaziqahОценок пока нет
- ANN - Ch2-Adaline and MadalineДокумент27 страницANN - Ch2-Adaline and MadalineAlfredo Valle HernándezОценок пока нет
- Unit II 1Документ60 страницUnit II 1dharanidec15Оценок пока нет
- Fast Convolution Cook Toom AlgorithmДокумент24 страницыFast Convolution Cook Toom AlgorithmAMIT VERMAОценок пока нет
- Develop A Matlab Program For Y-Bus N-R Load Flow AnalysisДокумент11 страницDevelop A Matlab Program For Y-Bus N-R Load Flow Analysisdebdeep89Оценок пока нет
- Formula Sheet For LSU Physics 2101, Exam 1, Fall '10Документ1 страницаFormula Sheet For LSU Physics 2101, Exam 1, Fall '10Scott BurkeОценок пока нет
- Econometric Theory: Module - IiДокумент11 страницEconometric Theory: Module - IiVishnu VenugopalОценок пока нет
- Equation SheetДокумент2 страницыEquation SheetjacobbanooniОценок пока нет
- Estimating A Regression Line: F. Chiaromonte 1Документ13 страницEstimating A Regression Line: F. Chiaromonte 1api-19973711Оценок пока нет
- Lecture 2: Fields, Rings, Vector Spaces Oh My!. .Документ7 страницLecture 2: Fields, Rings, Vector Spaces Oh My!. .BabiiMuffinkОценок пока нет
- QT1 Formula ListДокумент8 страницQT1 Formula ListCheng Win-YarnОценок пока нет
- Answer Key Problem Set 2Документ8 страницAnswer Key Problem Set 2Lelly MelindaaОценок пока нет
- Physics 505, Classical Electrodynamics: Homework 3 Due Thursday, 30 September 2004Документ1 страницаPhysics 505, Classical Electrodynamics: Homework 3 Due Thursday, 30 September 2004Ronn Marr PerezОценок пока нет
- Test Sem 1Документ29 страницTest Sem 1Hidden OneОценок пока нет
- 22 NeuralNetworksДокумент29 страниц22 NeuralNetworkst7529492Оценок пока нет
- RomantinaHutajulu.J.20.21.MatFis - nd.2019.TR05.Multiple Integral LipatДокумент11 страницRomantinaHutajulu.J.20.21.MatFis - nd.2019.TR05.Multiple Integral LipatRomantina HutajuluОценок пока нет
- Chapter 3 Special Techniques: Differential EquationsДокумент5 страницChapter 3 Special Techniques: Differential Equationsrajdeep paulОценок пока нет
- Assignment 2Документ5 страницAssignment 2Thanh NguyenОценок пока нет
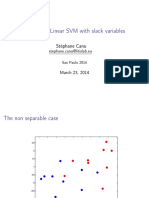
- Lecture3 Linear SVM With SlackДокумент32 страницыLecture3 Linear SVM With SlackUma TamilОценок пока нет
- STPM Math FormulaДокумент9 страницSTPM Math FormulaSimPor100% (6)
- Chapter 101 Fourier Series For Periodic Functions of Period 2Документ8 страницChapter 101 Fourier Series For Periodic Functions of Period 2FEOLO RIEL BENITEZ TARAYОценок пока нет
- 630 Rec Part2 Sol PDFДокумент9 страниц630 Rec Part2 Sol PDFboggled429Оценок пока нет
- Other Part of The Power Supply DesignДокумент6 страницOther Part of The Power Supply DesignKolawoleEbenezerОценок пока нет
- On Obtaining Minimal Variability OWA Operator Weights: Robert Full ErДокумент16 страницOn Obtaining Minimal Variability OWA Operator Weights: Robert Full ErSatyendra NarayanОценок пока нет
- Unit-2Документ54 страницыUnit-2Sathvik KunaОценок пока нет
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27От EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Оценок пока нет
- Solution Manual for an Introduction to Equilibrium ThermodynamicsОт EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsОценок пока нет
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesОт EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesРейтинг: 1.5 из 5 звезд1.5/5 (2)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОт EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesОценок пока нет
- His GaДокумент125 страницHis GaEduard Cosmin UngureanuОценок пока нет
- About HP Compaq D220MTДокумент2 страницыAbout HP Compaq D220MTEduard Cosmin UngureanuОценок пока нет
- Renting ContractДокумент4 страницыRenting ContractEduard Cosmin Ungureanu100% (1)
- C10 To C12Документ18 страницC10 To C12Eduard Cosmin UngureanuОценок пока нет
- III. Fourier Series and Fourier TransformДокумент20 страницIII. Fourier Series and Fourier TransformEduard Cosmin UngureanuОценок пока нет
- Dy Dy Ax BX DX DXДокумент35 страницDy Dy Ax BX DX DXEduard Cosmin UngureanuОценок пока нет
- C1 To C3 2016Документ33 страницыC1 To C3 2016Eduard Cosmin UngureanuОценок пока нет
- Edcom Corporation Coming Up On 1 of March 2012!Документ1 страницаEdcom Corporation Coming Up On 1 of March 2012!Eduard Cosmin UngureanuОценок пока нет
- Edcom Corporation Official Release: 6 February 2012! Trust Me!!!Документ1 страницаEdcom Corporation Official Release: 6 February 2012! Trust Me!!!Eduard Cosmin UngureanuОценок пока нет
- NEASD Homework 2016Документ2 страницыNEASD Homework 2016Eduard Cosmin UngureanuОценок пока нет
- Edcom Corporation Website Is Coming Up!Документ1 страницаEdcom Corporation Website Is Coming Up!Eduard Cosmin UngureanuОценок пока нет
- Module 7 NSTP 1Документ55 страницModule 7 NSTP 1PanJan BalОценок пока нет
- Wordbank 15 Coffee1Документ2 страницыWordbank 15 Coffee1akbal13Оценок пока нет
- 1572 - Anantha Narayanan FFS CalculationДокумент1 страница1572 - Anantha Narayanan FFS CalculationAnantha NarayananОценок пока нет
- Unit-Ii Syllabus: Basic Elements in Solid Waste ManagementДокумент14 страницUnit-Ii Syllabus: Basic Elements in Solid Waste ManagementChaitanya KadambalaОценок пока нет
- Lesson Plan For DemoДокумент9 страницLesson Plan For DemoJulius LabadisosОценок пока нет
- LU 5.1 ElectrochemistryДокумент32 страницыLU 5.1 ElectrochemistryNurAkila Mohd YasirОценок пока нет
- Advanced Herd Health Management, Sanitation and HygieneДокумент28 страницAdvanced Herd Health Management, Sanitation and Hygienejane entunaОценок пока нет
- Lecture 19 Code Standards and ReviewДокумент27 страницLecture 19 Code Standards and ReviewAdhil Ashik vОценок пока нет
- 6int 2008 Dec AДокумент6 страниц6int 2008 Dec ACharles_Leong_3417Оценок пока нет
- CBSE 10th ResultsДокумент1 страницаCBSE 10th ResultsAkshit SinghОценок пока нет
- ES Parent Bulletin Vol#19 2012 May 25Документ13 страницES Parent Bulletin Vol#19 2012 May 25International School ManilaОценок пока нет
- Current Harmonics: Electric Power System Power QualityДокумент3 страницыCurrent Harmonics: Electric Power System Power QualityAlliver SapitulaОценок пока нет
- 02 CT311 Site WorksДокумент26 страниц02 CT311 Site Worksshaweeeng 101Оценок пока нет
- Affidavit of Co OwnershipДокумент2 страницыAffidavit of Co OwnershipEmer MartinОценок пока нет
- Data Science ProjectsДокумент3 страницыData Science ProjectsHanane GríssetteОценок пока нет
- Power System Protection (Vol 3 - Application) PDFДокумент479 страницPower System Protection (Vol 3 - Application) PDFAdetunji TaiwoОценок пока нет
- Pyromet Examples Self StudyДокумент2 страницыPyromet Examples Self StudyTessa BeeОценок пока нет
- Dist - Propor.danfoss PVG32Документ136 страницDist - Propor.danfoss PVG32Michal BujaraОценок пока нет
- Reference GuideДокумент88 страницReference GuideAnonymous Qm0zbNk100% (1)
- Acceptable Use Policy 08 19 13 Tia HadleyДокумент2 страницыAcceptable Use Policy 08 19 13 Tia Hadleyapi-238178689Оценок пока нет
- Acute Suppurative Otitis MediaДокумент41 страницаAcute Suppurative Otitis Mediarani suwadjiОценок пока нет
- E-CRM Analytics The Role of Data Integra PDFДокумент310 страницE-CRM Analytics The Role of Data Integra PDFJohn JiménezОценок пока нет
- Vq40de Service ManualДокумент257 страницVq40de Service Manualjaumegus100% (4)
- Advanced Oil Gas Accounting International Petroleum Accounting International Petroleum Operations MSC Postgraduate Diploma Intensive Full TimeДокумент70 страницAdvanced Oil Gas Accounting International Petroleum Accounting International Petroleum Operations MSC Postgraduate Diploma Intensive Full TimeMoheieldeen SamehОценок пока нет
- Pen Pal Lesson Plan 3Документ3 страницыPen Pal Lesson Plan 3api-664582820Оценок пока нет
- NCP - Impaired Urinary EliminationДокумент3 страницыNCP - Impaired Urinary EliminationFretzgine Lou ManuelОценок пока нет
- MEMORANDUM OF AGREEMENT DraftsДокумент3 страницыMEMORANDUM OF AGREEMENT DraftsRichard Colunga80% (5)
- Investigation Data FormДокумент1 страницаInvestigation Data Formnildin danaОценок пока нет
- SY22-23+Annual+Report FinalДокумент47 страницSY22-23+Annual+Report FinalNorus LizaОценок пока нет
- Docket - CDB Batu GajahДокумент1 страницаDocket - CDB Batu Gajahfatin rabiatul adawiyahОценок пока нет