Академический Документы
Профессиональный Документы
Культура Документы
Analysematricielleappliqueauxstructuresmthodedeslmentsfinis 150313095917 Conversion Gate01 PDF
Загружено:
kovaryОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Analysematricielleappliqueauxstructuresmthodedeslmentsfinis 150313095917 Conversion Gate01 PDF
Загружено:
kovaryАвторское право:
Доступные форматы
CHAPITRE :
ANALYSE MATRICIELLE APPLIQUEE AUX
STRUCTURES
1. Dplacement uniaxial Elments deux forces
2.1. Elments deux forces
Considrons une barre prismatique de longueur L de section A et de module
dlasticit E.
Y x2
x1 L
nud 1
nud 2
y
u1 u2
F1 x
F2
1 2
Figure 1 : Barre prismatique de longueur L
Les extrmits de la barre sont identifies des nuds. Ces nuds sont des
points dattache (ou de liaison) dautres lments et les points dans un ensemble
dlments pour lesquels les dplacements sont faits.
Les forces, dans un lment de membrure deux forces, sont appliques
seulement aux nuds et les dplacements de tous les nuds sont dans la
direction x.
Sur la figure 1 les dplacements des nuds 1 et 2 sont respectivement
reprsents par les symboles u1 et u2.
Par Jol M. ZINSALO Page 1
On tablit les conventions suivantes :
Les forces et les dplacements sont compts positivement quand ils
agissent dans la direction positive des coordonnes. Sur la figure 1, toutes
les forces et les dplacements sont compts positivement. Par contre pour
lquilibre dun lment de membrure deux forces, la convention de signe
requiert que la force une extrmit (nud) soit positive et la force lautre
extrmit soit ngative.
La position dun nud dans une structure non dforme est prise gale la
position de rfrence pour ce nud. Donc le dplacement dun nud est le
changement de position du nud comme la structure se dforme pendant
lapplication de la charge.
De la mcanique classique, on retient que la variation de dplacement
lmentaire dun lment de membrure de longueur L, de section A et de module
dlasticit E (voir figure 1) est donne par la relation :
= = (1)
On dfinit la rigidit k de la membrure par lexpression suivante :
= .
De la relation (1) on tire :
= (2)
On obtient :
Appliquons cette dfinition la membrure deux forces de la figure 1. On peut
exprimer la force chaque nud de la membrure en fonction des dplacements
nodaux u1 et u2 et de la rigidit k. On a :
F1 = k (u1 u 2 ) F1 = k (u1 u 2 )
F2 = k (u 2 u1 ) F2 = k ( u1 + u 2 )
Sous forme matricielle on crit :
Par Jol M. ZINSALO Page 2
F1 1 1 u1
=k
1 u 2
(3)
F2 1
ou
{Q} = [k ] {q} (4)
avec :
{Q} = [F1 F2 ]T : vecteur chargement aux nuds de llment.
[k ] : matrice de rigidit de llment.
{q} = [u1 u 2 ]T : vecteur dplacement nodal de llment.
Dfinition
Un degr de libert dans une structure est un dplacement indpendant dun
nud.
Pour un lment de membrure deux forces, on voque seulement des
dplacements nodaux et puisque chaque nud peut mouvoir seulement le long
de laxe x, chaque nud a un degr de libert. Donc chaque lment possde
deux dplacements soit deux degrs de libert.
Lquation (4) est la relation gnrale force-dplacement pour llment de
membrure deux forces et est applicable tout lment de membrure dans un
assemblage dlments.
Pour plus de clart, on appliquera un numro didentification llment. Ainsi
lquation (3) devient :
F1 1 1 u1 F1e 1 1 u1e
= k e ou = k
1 u 2
e
F2 e 1 F2e 1 1 u 2e
e
Par Jol M. ZINSALO Page 3
2.2. Application un assemblage de deux lments deux forces chacun
1
y 2
x
1 2 3
Figure 2 : Assemblage de deux lments
Numro de Numro de nud global dans lassemblage
llment Nud local 1 Nud local 2
1 1 2
2 2 3
La figure 2 est un assemblage de deux lments deux forces dans un
dplacement uniaxial.
Pour llment 1 on a :
F1 1 1 u1
= k1
F2 1 1 1 u 2
1
Pour llment 2 on a :
F1 1 1 u1
= k 2 .
F2 2 1 1 u 2
2
En dissociant les lments, on a la figure 3 suivante :
2
1
F11 F21 F22 F32
1 2 2 3
Figure 3
Par Jol M. ZINSALO Page 4
On a :
F11 1 1 u11 F22 1 1 u 22
= k1 = k 2
1 u32
et
F21 1 1 u 21 1
F32 (5)
o est la force agissant sur le nud global de llment .
Considrons la figure suivante :
1
2
R1 R3
1 2
R3 3
u1 u2 u3
Figure 4 : Assemblage de deux lments
Lassemblage de deux lments montr la figure 4 possde 3 nuds et 3
dplacements (3 degrs de libert). Dsignons par Ri la force rsultante agissant
sur le nud global i. Notons que le diagramme de corps libre de la rgion
entourant le nud 2 tel que montr sur la figure 4 illustre la charge externe
applique R2 et les forces exerces par les lments adjacents. Ainsi lquilibre de
la rgion entourant le nud 2 donne :
R2 = F21 + F22.
De mme au nud 1 on a ; R1 = F11.
Au nud 3 on a : R3 = F32
Lobjectif est de combiner les deux quations (5) pour obtenir une quation qui
exprime les forces nodales Ri aux dplacements globaux ui de lassemblage. La
Par Jol M. ZINSALO Page 5
mthode suivante est thorique mais pas pratique pour solutionner les problmes
rels.
Procdure de la mthode
1. Elargir les quations (5) pour inclure tous les dplacements nodaux ; ceci
donne
F11 1 1 0 u1 0 0 0 0 u1
F21 = k1 1 1 0 u 2 et F22 = k 2 0 1 1 u 2
0 0 0 0 u3 F 0 1 1 u3
32
2. Faire la somme des quations obtenues
F11 0 1 1 0 u1 0 0 0 u1
F21 + F22 = k1 1 1 0 u 2 + k 2 0 1 1 u 2
0 F 0 0
0 u3 0 1 1 u3
32
3. Faire sortir le facteur du vecteur dplacement :
R1 F11 k1 k1 0 u1
R2 = F21 + F22 = k1 k1 + k 2 k 2 u 2
R F 0 k2 k 2 u3
3 32
ou
= (6)
est le vecteur de lassemblage des forces nodales globales
est le vecteur de lassemblage des dplacements nodaux globaux
est la matrice de rigidit du systme global assembl.
Lapplication de cette mthode permet de dvelopper des quations matricielles
pour des systmes contenant plus de deux lments. Bien que cette technique
soit pratique pour des fins manuelles, elle nest pas pratique pour des
incrmentations numriques sur ordinateur.
Une fois que les quations matricielles sont dveloppes pour la structure, ltape
suivante est de substituer les conditions aux limites et de rsoudre le systme
Par Jol M. ZINSALO Page 6
obtenu pour trouver les dplacements inconnus. A chaque nud dans la
structure, les charges externes appliques sont donnes ou bien le dplacement
nodal est spcifi.
Exercice 1 : Soit la structure suivante :
1 2
8
1 2
# = 10 3 $ = 15
1. Trouver les dplacements "# et "$ des nuds 2 et 3.
2. Trouver la force rsultante % au nud 1.
Rsolution
Pour llment 1 on peut crire :
1 1 "%
& %%
'= %( )* +
#% 1 1 "#
Pour llment 2 on a :
1 1 "#
& ##
'= #( )* +
$# 1 1 "$
On a :
,-
= = =
% #
.
En largissant chacune de ces quations on a :
%% 1 1 0 "% 0 0 0 0 "%
/ #% 1 = "
21 1 03 / # 1 45 / ## 1 = 20 1 13 /"# 1
0 0 0 0 "$ $# 0 1 1 "$
En les sommant on obtient :
%%+0 1 1 0 "%
/ #% + ## 1 = 21 2 13 /"# 1
0 + $# 0 1 1 "$
Par Jol M. ZINSALO Page 7
"%
% ,- 1 1 0
/ #1 = 21 2 13 /"# 1
.
$ 0 1 1 "$
Avec lencastrement en 1 on a "% = 0 et on a :
% ,- 1 1 0 0
(1) / 10 1 = "
21 2 13 / # 1
.
15 0 1 1 "$
On peut y extraire :
10 ,- 2 1 "# "# . 1 1 10 . 5
* += ( ) *" + *" + = ( )* += * +
15 . 1 1 $ $ ,- 1 2 15 ,- 20
; ?
Do
= <= > =
De 1 on a :
,- ,- ,- ,- 5.
= (0) ("# ) + (0) "$ = @ A=5
%
. . . . ,-
Do F = ;
Exercice 3 : Dterminer la matrice de rigidit globale de lassemblage de 3
lments de structure montr la figure suivante :
%
1 2 3 4 G 8
1 2 3
Par Jol M. ZINSALO Page 8
Solution :
1
#%
%%
2
$#
1 2
## 2 3 3
G$
$$ 3 4
1 1 "%%
Pour llment 1 on a :
& %%
'= ( )* +
#% 1 1 "#%
1 1 0 0 "%
Et en largissant on a :
%%
1 1 0 0 "#
H #% I = J KH I
0 0 0 0 0 "$
0 0 0 0 0 "G
0 0 0 0 0 "%
Pour llment 2 on a :
1 1 "## 0 1 1 0 "#
& ##
'= ( )* + H ##
I= J KH I
$# 1 1 "$# $# 0 1 1 0 "$
0 0 0 0 0 "G
0 0 0 0 "%
Pour llment on a :
0
3
1 1 "$$ 0 0 0 0 0 "#
& $$
'= ( )* + H I= J KH I
G$ 1 1 "G$ $$ 0 0 1 1 "$
G$ 0 0 1 1 "G
3. Dplacement plan gnral : lments deux forces
Considrons llment de membrure deux forces positionnes arbitrairement
dans le plan global (X, Y) :
Par Jol M. ZINSALO Page 9
8
M
2 #
N
1 U
LM : axe de coordonne globales
8N : axe de coordonnes locales
Soient :
%O la composante de % au nud 1 dans la direction globale L
%P la composante de % au nud 1 dans la direction locale 8
%Q la composante de % au nud 1 dans la direction globale M
%R la composante de % au nud 1 dans la direction locale N
Les dplacements nodaux sont reprsents par :
" O : dplacement du nud dans la direction globale L
" P : dplacement du nud dans la direction locale 8
S Q : dplacement du nud dans la direction globale M
S R : dplacement du nud dans la direction locale N
Pour llment considr, %R = 0 et #R =0
On peut crire
"%P
1 1
%P
/ 1= ( )/ 1 7
1 1 "
#P #P
Transformons lquation deux dplacements en quation quatre dplacements
en considrant %R = 0 et #R =0
On a :
Par Jol M. ZINSALO Page 10
X
%P
[ 1 0 1 0 "%P
%R
= \0 0 0 0] HS%R I (8)
W #P Z 1 0 1 0 "#P
V #R Y 0 0 0 0 S#R
Ou _ PR = PR ` PR (9)
o
_ PR : vecteur colonne des forces au nud de llment agissant dans les
directions locales 8 et N.
PR : matrice de rigidit de llment dans le systme de coordonnes locales au
plan local
` PR : vecteur colonne des coordonnes du dplacement dans les directions
locales 8 et N.
4. Transformation des coordonnes
Dans une structure gnrale beaucoup dlments sont donns et devraient tre
orients diffrentes valeurs de langle U.
M
N
8
ef
n U
p U
L
b
Soit b un vecteur b = c efg & O ' systme de coordonnes globales
bQ
bO
b = c efg & ' = Vi + bQ ef
bQ
Dans le systme de coordonnes locales (j; , n)
bP
b = n &b ' = VP + bR n
R
Dans la rotation dangle U on a :
Par Jol M. ZINSALO Page 11
cos U sin U
n = c efg ( ) = c efg ,
sin U cos U
o U est mesur positivement dans le sens des aiguilles dune montre partir de
laxe L.
b bP
Donc :
b = c efg & O ' = b = c efg , &b '
bQ R
bO bP
do
& ' = , &b ' (10)
bQ R
Cest la relation de transformation de tout vecteur b dans un systme daxe en
rotation.
Les lments de la matrice carre , sont les directions cosinus des angles entre
les vecteurs unitaires des deux systmes de coordonnes.
La matrice de passage est assez universelle et dlicate. Daucun inverse
c efg = n u,
linterprtation en crivant
o la matrice u
, est la transpose de la matrice , dans lquation (10).
Dans le cas gnral dune rotation dun systme de coordonnes orthogonales
, v
= , w%
Considrons la transformation du vecteur force de lquation (8) du systme de
coordonnes locales (8, N) en systme en systme de coordonnes globales (L, M) :
%O %P
/ 1= , x y z {4 |z}~4 1
%Q %R
#O #P
/ 1= , x y z {4 |z}~4 2
#Q #R
En combinant ces deux relations on obtient le vecteur force nodale de llment
entier. On a :
X [
, 0
%O %P
H %Q I =
%R
W
#P Z
#O
0 ,
#Q
V #R Y
ou
Par Jol M. ZINSALO Page 12
_ OQ = ,# _ PR (11)
{zU |U 0 0
avec
|U {zU 0 0
,# =J K
0 0 {zU |U
0 0 |U {zU
En rappelant lquation (9) :
_ PR = PR ` PR
et en la substituant dans (11), on obtient :
_ OQ = ,# PR ` PR (12)
La matrice de transformation ,# peut tre aussi applique au vecteur
"%O "%P
dplacement :
S%Q S%R
H" I = ,# H" I
#O #P
S#Q S#R
ou :
` OQ = ,# ` PR ` PR = ,# w%
` OQ
Do lquation (12) devient :
_ OQ = ,# PR ,# v
` PR (13)
De la forme _ OQ = OQ ` OQ
OQ = ,# PR ,# v (14)
La relation (14) transforme la matrice de rigidit de llment local (crit
originellement en systme de coordonnes locales) en systme de coordonnes
globales.
Par Jol M. ZINSALO Page 13
Exercice : On considre llment de la figure suivante
Y
x Construire la matrice de rigidit de la
2
structure relativement au systme de
coordonnes globales (L M)
y
1
Correction :
Matrice de rigidit par rapport au systme global (L M).
Le systme local (8 N) est appliqu lorigine au nud 1. La matrice de rigidit
locale de cet lment relativement au systme local (8 N) est donn par :
1 0 1 0
,- 0 0 0 0
= J K
PR
. 1 0 1 0
0 0 0 0
La matrice de rigidit relativement au systme global LM es obtenue en utilisant
lquation (14) suivante :
OQ = ,# PR ,# v
O pour U = 90 on a :
0 1 0 0 0 1 0 0
1 0 0 0 1 0 0 0
,# = J K ,# v
= J K
0 0 0 1 0 0 0 1
0 0 1 0 0 0 1 0
0 1 0 0 1 0 1 0 0 1 0 0
1 0 0 0 ,- 0 0 0 0 1 0 0 0
= J K J K J K
OQ
0 0 0 1 . 1 0 1 0 0 0 0 1
0 0 1 0 0 0 0 0 0 0 1 0
0 0 0 0
Do
,- 0 1 0 1
= J K
OQ
. 0 0 0 0
0 1 0 1
Par Jol M. ZINSALO Page 14
Exercice 2 : Pour la structure montre la figure suivante trouver la matrice de
rigidit de chaque lment relativement au systme de coordonnes L M.
3 = 10
, = 4#
Elment 2
, = 1,5 #
30
(Acier) Elment 1
(Acier)
1 2
X
40
Rsolution : Considrons llment 1 de la figure. Dfinissons arbitrairement le
nud global 3 comme nud local 1 de cet lment.
Y local
N
U est compt partir
3 1
4=
de L
U=
1
global
local 2
2 2
U=
2
X
8
La matrice de rigidit relativement au systme local 8 N est dfinie par lquation
1 0 1 0
(8) :
0 0 0 0 ,-
= % J K z =@ A
PR
1 0 1 0 %
. %
0 0 0 0
La matrice de rotation ,# (quation (11)) scrit :
0 1 0 0
1 0 0 0
,# = J K
0 0 0 1
0 0 1 0
Par Jol M. ZINSALO Page 15
Ainsi lquation (14) donne :
OQ = ,# PR ,# v
0 1 0 0 1 0 1 0 0 1 0 0
1 0 0 0 0 0 0 0 1 0 0 0
= J K %J K J K
OQ
0 0 0 1 1 0 1 0 0 0 0 1
0 0 1 0 0 0 0 0 0 0 1 0
0 0 0 0
0 1 0 1
= % J K pour l lment 1
OQ
0 0 0 0
0 1 0 1
Considrons llment 2 de la figure et dfinissons le nud global 1 comme
nud local 1. En suivant la mme procdure prcdente on a :
Y
x
2
U
y
1 0 1 0
X
0 0 0 0 ,-
= # J K z =@ A
PR
1 0 1 0 #
. #
0 0 0 0
La matrice de rotation ,# scrit :
0,8 0,6 0 0
0,6 0,8 0 0
,# = J K
0 0 0,8 0,6
0 0 0,6 0,8
Ainsi lquation (14) donne
OQ = ,# PR ,# v
0,8 0,6 0 0 0 1 0 0 0,8 0,6 0 0
0,6 0,8 0 0 1 0 0 0 0,6 0,8 0 0
= J K J K J K
PR
0 0 0,8 0,6 0 0 0 1 0 0 0,8 0,6
0 0 0,6 0,8 0 0 1 0 0 0 0,6 0,8
Par Jol M. ZINSALO Page 16
0,64 0,48 0,64 0,48
0,48 0,36 0,48 0,36
= #J K pour llment
PR
0,64 0,48 0,64 0,48
0,48 0,36 0,48 0,36
2
Exercice 3 : Assembler les matrices de rigidit des lments de la structure de
lexercice 2 (prcdent) pour obtenir la matrice de rigidit du systme global.
Procdure de lassemblage des lments
1. La premire tape dans la procdure dassemblage des matrices est
dattribuer des numros chaque variable de dplacement. Sur la base de
rfrence locale en dimension 1 les 4 dplacements (2 dplacements par
nud pour chaque nud par lment) seront numrotes conscutivement
de 1 4.
- Numro nodal local : 1 1 2 2
- Dplacement local : "% S% "# S#
- Numro de dplacement local : 1 2 3 4
2. La deuxime tape consiste attribuer chaque dplacement global des
numros. Puisquil y a 3 nuds dans ce problme, il y a 6 dplacements
avant lapplication des contraintes aux limites :
- Numro nodal global : 1 1 2 2 3 3
- Dplacement global : "% S% "# S# "$ S$
Remarquons que le numro de dplacement global est li au numro nodal
global par la relation :
Numro de dplacement global dans la direction L = 2(" z |z}~ z~) 1
Numro de dplacement global dans la direction M = 2(" z |z}~ z~)
3. La 3e tape consiste tablir la numrotation nodale le long des lignes de la
table suivante :
Par Jol M. ZINSALO Page 17
Numro nodal global
Numro dlment
Nud local 1 Nud local 2
1 1 2
2 2 3
1 2
2
2 3
Ce tableau identifie que le numro global de chaque nud local de tout lment
peut tre tabli avec le tableau gnral (, e) dont la ligne (le premier indice)
dfinit le nud 1 ou le nud 2 de llment.
Pour ce problme deux lments on doit avoir (, e)
I (Numro de llment)
1 2
I
Elment 2
1 3 2 Elment 1
J
Nud 2 1 3
Nud local 1 Nud local 2
Les attributions locales et globales de llment 1 se prsentent comme suit :
5 6 3 4 Numro de dplacement
0 0 0 0
1 2 3 4
5 1
0 1 0 1
=
6 2
% %
0 0 0 0
3 3
4 4 0 1 0 1
Par Jol M. ZINSALO Page 18
Les attributions locales et globales de llment 2 se prsentent comme suit :
1 2 5 6
0,64 0,48 0,64 0,48
1 2 3 4
1
1
0,48 0,36 0,48 0,36
=
2 2
# #
0,64 0,48 0,64 0,48
5 3
6 4 0,48 0,36 0,48 0,36
La procdure cette dernire tape consiste maintenant ajouter des lments
de chaque matrice de rigidit ayant une attribution globale commune.
Ceci cre la matrice de rigidit globale qui dans le cadre de lexercice 2 scrit :
0,64 # 0,48 # 0 0,64 # 0,48 #
1 2 3 4 5 6
0
1
0,48 # 0,36 # 0 0 0,48 # 0,36 #
2
0 0 0 0 0 0
=
%
3
0 0 0 0
%
0,64 # 0,48 # 0 0 0,64 # + 0 0,48 # + 0
5
6 0,48 # 0,36 # 0 % 0,48 # + 0 % + 0,36
Exercice 4 : Continuer avec la structure illustre lexercice 2, construire les
vecteurs charge et dplacement. Utiliser la matrice de rigidit dveloppe
lexercice 3. Rsoudre pour obtenir les vecteurs dplacement au nud 3.
Rsolution
Rappelons que le vecteur charge globale est simplement un tableau de charge
appliqu chaque nud et le vecteur dplacement global est simplement un
tableau des dplacements dans les directions.
Par Jol M. ZINSALO Page 19
La rsultante des charges externes appliques agissant sur la structure initiale de
lexercice 2.
X [ X [
%O %O
%Q
%Q
= #O
= #O
W #Q Z W #Q Z
$O 10.000
V $Q Y V 0 Y
O les ractions aux appuis %O , %Q , #O , #Q sont des inconnues.
"% 0
X S% [ X0[
"
0
= S =
#
W #Z W0Z
"$ "$
VS$ YOQ VS$ YOQ
=
0,64 # 0,48 # 0 0 0,64 # 0,48 # 0
X [ X
%O
[
%Q 0,48 # 0,36 # 0 0 0,48 # 0,36 # 0
#O 0 0 0 0 0 0 0
= (16)
W Z 0 0 0 0 % W 0 Z
%
#Q
"
$O 0,64 # 0,48 # 0 0 0,64 # + 0 0,48 # + 0 $O
V $Q Y 0,48 # 0,36 # 0 % 0,48 # + 0 % + 0,36 #
V S$Q Y
La solution de cette quation (16) suit la procdure utilise prcdemment.
Dabord on rduit la matrice de rigidit en extrayant les ranges associes aux
forces inconnues et les colonnes correspondant aux valeurs nulles des
0,64 0,48 "$O
dplacements. Ce qui donne lquation suivante :
10000 # #
/ 1=2 3/ 1
0 0,48 # 0,36 # + % S$Q
O
,- 1,5 30. 10
=@ A = = 1,5. 10 /
%
. % 30
,-
= @ A = 2,4. 10 /
#
.
Par Jol M. ZINSALO Page 20
En substituant ces valeurs % et # dans la matrice de rigidit on trouve :
"$P = 0,0103
S$R = 0,0050
Les ractions aux appuis sont dtermines par substitution des dplacements "$P
et S$R venant dtre calculs.
%O 10000
7500
H %Q I = H I
#O 0
#Q 7500
= 10
3
%O = 10
= 7,5
1
%Q = 7,5 #Q
4. K
5. Elment de poutre ou membrure dans un plan
Llment deux forces a des applications pratiques en analyse de structure. Il
est assez limit car il ne donne quune rigidit de flexion. Un second lment
tudi est llment de chargement uniaxial et ultrieurement un lment gnral
pouvant supporter des contraintes axiales et des forces de liaison. Soit un
lment de poutre montr la figure suivante :
Par Jol M. ZINSALO Page 21
M
S% S#
% , U% # , U#
L
% #
L
Les forces et les moments agissent dans le plan et seulement aux nuds
extrmes de la poutre. La force nodale est perpendiculaire llment. Le
chargement axial nest pas considr ici.
Le systme de coordonnes locales (8, N)est parallle au systme de coordonnes
globale (L, M). Cela signifie que tous les lments de la structure sont relis par
une droite.
Les dplacements chaque nud comportent un dplacement linaire S dans la
direction N ou M et un axe neutre de rotation U . La poutre est suppose avoir une
rigidit de flexion uniforme le long delle-mme et sur toute sa longueur .. La
relation charge rigidit dplacement pour cet lment a la mme forme
symbolique que celle tudie prcdemment savoir :
_ = ` (17)
% %% %# %$ %G S%
U%
H % I = J #% ## #$ #G K HS I
# $% $# $$ $G #
# G% G# G$ GG
U#
Dtermination des coefficients de la matrice de rigidit
Forons une configuration de dplacement sur cet lment. Supposons que S% = 1
et que tous les autres dplacements. Llment devrait tre dform
conformment la figure ci-dessous :
Par Jol M. ZINSALO Page 22
M
1 %
S% = 1
2
% #
L
La relation charge dplacement devient dans ces conditions :
% %% 1 %G
% 0
H I = J K H I
# 0
# G% GG 0
En dautres termes les coefficients de la matrice de rigidit sont gaux aux forces
et aux moments de couple requis pour les dplacements imposs.
Pour les systmes linaires on utilise la technique de superposition
conformment la figure suivante :
% , U% %
% %
%
%
% #
S% = 1
En utilisant S% = 1 = % + #
%. % .#
$
S% = +
3- 2-
U% = 0 = % + #
.$ % .#
= +
%
2- -
12- 6-
En rsolvant ce systme on obtient
= = %% % = =
%
.$ .# #%
Par Jol M. ZINSALO Page 23
12-
Pour trouver les autres inconnues on utilise les quations de la statique.
N=0 = = = $%
# %
.$
6-
= 0 # = ( % . + % ) = # =
. G%
Par Jol M. ZINSALO Page 24
Вам также может понравиться
- Dossiers D'appel D'offre 2019 - 033Документ122 страницыDossiers D'appel D'offre 2019 - 033kovaryОценок пока нет
- Pfe GC 0637Документ117 страницPfe GC 0637BrahimmabasОценок пока нет
- Memoire Millogo Version CorrigeДокумент91 страницаMemoire Millogo Version CorrigeImed CasanostraОценок пока нет
- Rapport FinalДокумент33 страницыRapport Finaldahirou haneОценок пока нет
- PompageДокумент99 страницPompagepaulОценок пока нет
- Pression PVC V1.11Документ18 страницPression PVC V1.11laamiriОценок пока нет
- Répartition Variable Dans Deux DirectionsДокумент7 страницRépartition Variable Dans Deux DirectionskovaryОценок пока нет
- 2club SER 5eme PartieДокумент49 страниц2club SER 5eme PartiekovaryОценок пока нет
- Dao TDR Travaux Forages GuidimakhaДокумент87 страницDao TDR Travaux Forages GuidimakhakovaryОценок пока нет
- Country Kit Documentation 2017 FrenchДокумент24 страницыCountry Kit Documentation 2017 FrenchGodwinОценок пока нет
- Signalisation ReperageДокумент73 страницыSignalisation ReperagekovaryОценок пока нет
- Armatures Voussoirs Planche 1Документ1 страницаArmatures Voussoirs Planche 1kovaryОценок пока нет
- Poly ETSHER Intro à La Rã Glementation&predimensionnement DesДокумент87 страницPoly ETSHER Intro à La Rã Glementation&predimensionnement DesKevin VillegasОценок пока нет
- Procédure de Cracker Covadis 13Документ10 страницProcédure de Cracker Covadis 13KOTCHI kouadio Fabrice100% (1)
- Manuel ConCrete PlusДокумент105 страницManuel ConCrete PluskovaryОценок пока нет
- Numérisation 0168Документ2 страницыNumérisation 0168kovaryОценок пока нет
- Revit 2018 Dalot CadreДокумент6 страницRevit 2018 Dalot CadrekovaryОценок пока нет
- Installer Un Pilote Non Signe Sous Windows 8 Et 8 1Документ16 страницInstaller Un Pilote Non Signe Sous Windows 8 Et 8 1kovaryОценок пока нет
- Cours Enrobés ETSДокумент38 страницCours Enrobés ETSkovaryОценок пока нет
- Répartition Variable Dans Deux DirectionsДокумент7 страницRépartition Variable Dans Deux DirectionskovaryОценок пока нет
- 69 DPC 1 Notice Explicative RD 307 Rocquencourt1437485704698 2Документ11 страниц69 DPC 1 Notice Explicative RD 307 Rocquencourt1437485704698 2kovaryОценок пока нет
- Projet Basique de La Lisaison Routiere Entre Pau Et Oloron Et Contournement D'oloronДокумент17 страницProjet Basique de La Lisaison Routiere Entre Pau Et Oloron Et Contournement D'oloronUnes JrdОценок пока нет
- Tzen3 Pièce F Vdef 2Документ10 страницTzen3 Pièce F Vdef 2kovaryОценок пока нет
- Revit 2018 Dalot CadreДокумент6 страницRevit 2018 Dalot Cadrekovary100% (1)
- Programme de Formation Module Excel Avancé + VBA - 2Документ1 страницаProgramme de Formation Module Excel Avancé + VBA - 2kovaryОценок пока нет
- Ther I Ault StabilisationДокумент27 страницTher I Ault StabilisationkovaryОценок пока нет
- Armatures Voussoirs Planche 2Документ1 страницаArmatures Voussoirs Planche 2kovaryОценок пока нет
- Vue Transversale Du TablierДокумент1 страницаVue Transversale Du TablierkovaryОценок пока нет
- Management de ProjetДокумент138 страницManagement de Projetsaidi kaderОценок пока нет
- Coupe Longitudinale Du TablierДокумент1 страницаCoupe Longitudinale Du TablierkovaryОценок пока нет
- TD1 CorДокумент9 страницTD1 Coramine jodar100% (1)
- Formulaire SUP SuitesДокумент2 страницыFormulaire SUP Suiteshala shooowОценок пока нет
- Composition de 3ètrim MathsДокумент2 страницыComposition de 3ètrim Mathsnaababaongo052Оценок пока нет
- Crabol XXIV-3Документ2 страницыCrabol XXIV-3Pham Van DuongОценок пока нет
- QCM 5Документ2 страницыQCM 5HAPMRIОценок пока нет
- LC 22-001Документ7 страницLC 22-001Simon Houde100% (2)
- cm2 Exercices SymetrieДокумент4 страницыcm2 Exercices Symetriegjx7qcfwmyОценок пока нет
- Beer - Méthode de Clarinette (1891)Документ60 страницBeer - Méthode de Clarinette (1891)fabri21Оценок пока нет
- Cours AngularДокумент44 страницыCours Angularyosri grira100% (1)
- Examen National Du BTS - Maintenance Industrielle - Session de Mai 2015Документ4 страницыExamen National Du BTS - Maintenance Industrielle - Session de Mai 2015enjy top1Оценок пока нет
- Matematica În Egipul Antic FR 3Документ3 страницыMatematica În Egipul Antic FR 3Valeriu TurcanuОценок пока нет
- Pvsyst Evaluation: Pvsyst - Rapport de SimulationДокумент7 страницPvsyst Evaluation: Pvsyst - Rapport de Simulationidriss habibiОценок пока нет
- Cours Systemes de Transmission de MouvementДокумент5 страницCours Systemes de Transmission de MouvementdjalikadjouОценок пока нет
- ADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jДокумент1 страницаADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jAlioune Badara Ibn Abu Talib DièneОценок пока нет
- TP BDV 2016Документ17 страницTP BDV 2016Khabtane AbdelhamidОценок пока нет
- Controle 1 - 4 S1 PC 1bac FRДокумент3 страницыControle 1 - 4 S1 PC 1bac FRbrinimed06gmail.comОценок пока нет
- TD N°2 Maths 3emeДокумент5 страницTD N°2 Maths 3emebilly kanaОценок пока нет
- SALOMÉ Test Management FrameworkДокумент101 страницаSALOMÉ Test Management FrameworkPharell William BaldorОценок пока нет
- Mem Corr AndriantavyДокумент66 страницMem Corr AndriantavyWael TrabelsiОценок пока нет
- Enrobage EC2Документ7 страницEnrobage EC2Abdelkader Drr100% (1)
- Macro ImportДокумент29 страницMacro ImportKamil ChamОценок пока нет
- 0-Rappel Langage SQLДокумент4 страницы0-Rappel Langage SQLaminehosnyОценок пока нет
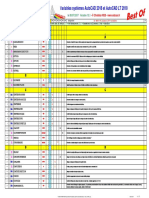
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESДокумент7 страницVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazeОценок пока нет
- ParetoДокумент13 страницParetoIkram El GhazouaniОценок пока нет
- 1-html CssДокумент88 страниц1-html CssSouleymane TraoreОценок пока нет
- Remerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonДокумент42 страницыRemerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonOMAE01Оценок пока нет
- Travaux Dirigés - TD - ArbresДокумент2 страницыTravaux Dirigés - TD - Arbresلا إلٰه إلّا اللهОценок пока нет
- Favre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFДокумент9 страницFavre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFPriscila TorresОценок пока нет
- MEMOIRE Samer MoussaДокумент94 страницыMEMOIRE Samer Moussatoni JabbourОценок пока нет
- PLE CoursДокумент95 страницPLE CoursFranck-Olivier KassouОценок пока нет