Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Vol Damper (Smacna)Документ9 страницVol Damper (Smacna)MohamedOmar83Оценок пока нет
- ADBCДокумент12 страницADBCJaspal KumarОценок пока нет
- Catalogo EpirocДокумент7 страницCatalogo EpirocAngel García0% (1)
- PSD Installation Manual Moore IndustriesДокумент16 страницPSD Installation Manual Moore IndustriesnohjadОценок пока нет
- Projeto Experimental Fatorial para Aumentar A Produção de Metano Na Digestão de Resíduos LácteosДокумент7 страницProjeto Experimental Fatorial para Aumentar A Produção de Metano Na Digestão de Resíduos LácteosLuís Paulo CardosoОценок пока нет
- EVI DC Inverter Technical Manual 2 Capacity TableДокумент67 страницEVI DC Inverter Technical Manual 2 Capacity TableMouyed Al QasemОценок пока нет
- ACI 517-2R-87 Standard Specification For Tolerances For Accelerated Curing at Atmospheric PressureДокумент17 страницACI 517-2R-87 Standard Specification For Tolerances For Accelerated Curing at Atmospheric PressureKiramat ShahОценок пока нет
- Ultrasonic Atomizing Nozzle SystemsДокумент40 страницUltrasonic Atomizing Nozzle SystemsAnonymous H8hysGxA100% (1)
- Centrifugal PumpДокумент56 страницCentrifugal Pumpchandraa2208Оценок пока нет
- Roofing SafetyДокумент38 страницRoofing SafetyDhârâñî KûmârОценок пока нет
- Catalogo CMCДокумент145 страницCatalogo CMCalyboscanОценок пока нет
- Harbor GlenДокумент31 страницаHarbor GlenElvis Felix fernandesОценок пока нет
- CS1 Course OutlineДокумент2 страницыCS1 Course Outlineapi-27149177Оценок пока нет
- AAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Документ10 страницAAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Benjamín AlainОценок пока нет
- Electroplating of Silver, Zinc and IronДокумент13 страницElectroplating of Silver, Zinc and IronTahira AzamОценок пока нет
- Upload Photosimages Into Custom Table & Print in Adobe FormДокумент14 страницUpload Photosimages Into Custom Table & Print in Adobe FormEmilSОценок пока нет
- CH 19Документ147 страницCH 19Kathy YellaОценок пока нет
- PDS HEMPATEX ENAMEL 56360 en-GB PDFДокумент2 страницыPDS HEMPATEX ENAMEL 56360 en-GB PDFMohamed ChelfatОценок пока нет
- WAXESДокумент2 страницыWAXESPra YogaОценок пока нет
- Muhammad Akif Naeem Open Ended Lab Signals and SystemДокумент20 страницMuhammad Akif Naeem Open Ended Lab Signals and SystemMuhammad Akif NaeemОценок пока нет
- BSM BWMP - D1 and D2Документ34 страницыBSM BWMP - D1 and D2Adnan DjamalОценок пока нет
- 010 Zircoat MДокумент3 страницы010 Zircoat MvsdeepakchandraОценок пока нет
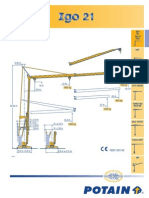
- Potain Igo 21 PDFДокумент4 страницыPotain Igo 21 PDFMarco CruzОценок пока нет
- Poloyagan Integrated School Monitoring Tool On Aip ImplementationДокумент3 страницыPoloyagan Integrated School Monitoring Tool On Aip ImplementationLALAINE BONILLAОценок пока нет
- Lab3 BJT Current MirrorsДокумент5 страницLab3 BJT Current MirrorsaublysodonОценок пока нет
- 000-Za-E-M09403 - C-MS For Cable Tray InstallationДокумент15 страниц000-Za-E-M09403 - C-MS For Cable Tray Installationsyam prasad100% (1)
- Differential Calculus Assignment No.3Документ20 страницDifferential Calculus Assignment No.3Agerico FunelasОценок пока нет
- Injection Molding TrainingДокумент131 страницаInjection Molding TrainingNuria Varela100% (3)
- Cryogenics Handbook PDFДокумент227 страницCryogenics Handbook PDFmangyanОценок пока нет
- ReadmeДокумент9 страницReadmewatzzupОценок пока нет