Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- R. K. Gangwar DE (Transmission) BRBRAITT, JabalpurДокумент57 страницR. K. Gangwar DE (Transmission) BRBRAITT, JabalpurRanjit SinghОценок пока нет
- Installation and Troubleshooting Guide: CDI P/N: 113-3101Документ1 страницаInstallation and Troubleshooting Guide: CDI P/N: 113-3101yamyrulesОценок пока нет
- Fms Sample SopsДокумент13 страницFms Sample SopsUmang MittalОценок пока нет
- Hyt Tc-518 Service ManualДокумент59 страницHyt Tc-518 Service Manualyd2oyd100% (1)
- Manual Servico Home Theater Samsung HT c5500+Документ137 страницManual Servico Home Theater Samsung HT c5500+DJALMA MOREIRAОценок пока нет
- Moc3041 and Moc3021Документ1 страницаMoc3041 and Moc3021ahm_adОценок пока нет
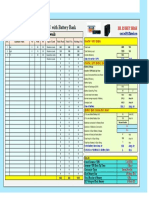
- Inverter UPS Size With Battery Design and CalculationДокумент1 страницаInverter UPS Size With Battery Design and CalculationRohit SahОценок пока нет
- Desktop HP DC5750Документ42 страницыDesktop HP DC5750jerrypoaОценок пока нет
- Srinivasan Engineering CollegeДокумент92 страницыSrinivasan Engineering CollegeAnonymous 3tsL8SRtfОценок пока нет
- Eliminating Oscillation Between Parallel MnosfetsДокумент6 страницEliminating Oscillation Between Parallel MnosfetsCiprian BirisОценок пока нет
- The Future of MM-Wave PackagingДокумент11 страницThe Future of MM-Wave PackagingTribu Vaquero JimenezОценок пока нет
- Digital Signal Processing Soma Biswas 2017Документ19 страницDigital Signal Processing Soma Biswas 2017Bkm Mizanur RahmanОценок пока нет
- RAM Basics: Anselmo LastraДокумент56 страницRAM Basics: Anselmo Lastravishal samundreОценок пока нет
- Arduino Based Lightning Detector ProjectДокумент6 страницArduino Based Lightning Detector ProjectBenjamin DoverОценок пока нет
- 3260 Spec SheetДокумент10 страниц3260 Spec SheetZulmar Itzel Vallarta Rodriguez100% (1)
- Taxonomy of Parallel Computing ParadigmsДокумент9 страницTaxonomy of Parallel Computing ParadigmssushmaОценок пока нет
- COA question bank on computer organization and architectureДокумент10 страницCOA question bank on computer organization and architectureVenkat RamОценок пока нет
- Mos Field Effect Transistor: Data SheetДокумент8 страницMos Field Effect Transistor: Data SheetAdam SchwemleinОценок пока нет
- Lecture 1 - Microwave SystemsДокумент53 страницыLecture 1 - Microwave SystemsAbdul SuboorОценок пока нет
- Computer ComponentsДокумент8 страницComputer ComponentsbrbioinfoОценок пока нет
- Source ShiftingДокумент5 страницSource ShiftingSai samarth KhОценок пока нет
- DXДокумент23 страницыDXEuis HafsahОценок пока нет
- FT 450DДокумент102 страницыFT 450DSandro TolosaОценок пока нет
- Loop Analysis of Resistive CircuitДокумент11 страницLoop Analysis of Resistive CircuitVikash Ram MahuriОценок пока нет
- 1 chapter-CHMДокумент3 страницы1 chapter-CHMANDRO乡GAMERОценок пока нет
- DS IM120417015 Dual Step Motor Driver ShieldДокумент3 страницыDS IM120417015 Dual Step Motor Driver ShieldJohn Doe100% (1)
- AN2317 Application Note: STPM01 Programmable, Single-Phase Energy Metering IC External CircuitsДокумент27 страницAN2317 Application Note: STPM01 Programmable, Single-Phase Energy Metering IC External CircuitsJitender SharmaОценок пока нет
- Some Type of Vacuum CapacitorДокумент13 страницSome Type of Vacuum CapacitorRuben CruzОценок пока нет
- Address SingДокумент32 страницыAddress SingGousAttarОценок пока нет
- LM 723Документ22 страницыLM 723Zoran DjukicОценок пока нет