Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Analysis of Bike Clutch LeverДокумент29 страницAnalysis of Bike Clutch LeverpandiОценок пока нет
- 7805Документ2 страницы7805pandiОценок пока нет
- Nucleus and Cytoplasm Segmentation in Microscopic Images Using K-Means Clustering and Region GrowingДокумент14 страницNucleus and Cytoplasm Segmentation in Microscopic Images Using K-Means Clustering and Region GrowingpandiОценок пока нет
- Power Electronics Project ReportДокумент39 страницPower Electronics Project ReportpandiОценок пока нет
- Automatic Pneumatic Bumper and Break Actuation Before CollisionДокумент41 страницаAutomatic Pneumatic Bumper and Break Actuation Before Collisionpandi100% (2)
- A Bidirectional DC-DC Converter ModДокумент90 страницA Bidirectional DC-DC Converter Modvinay kumar100% (6)
- 4 Way Hacksaw MachineДокумент8 страниц4 Way Hacksaw Machinepandi67% (3)
- Online Course On Embedded SystemsДокумент75 страницOnline Course On Embedded SystemspandiОценок пока нет
- Lung Cancer Detection Using Digital Image ProcessingДокумент40 страницLung Cancer Detection Using Digital Image Processingpandi67% (3)
- How To Display Text On LED Using 8051 MicrocontrollerДокумент6 страницHow To Display Text On LED Using 8051 MicrocontrollerpandiОценок пока нет
- Cloud ComputingДокумент6 страницCloud ComputingpandiОценок пока нет
- Karutha Pandi.M: Career ObjectiveДокумент3 страницыKarutha Pandi.M: Career ObjectivepandiОценок пока нет
- A DC-DC Converter With High Voltage Gain and Two Input Boost StagesДокумент5 страницA DC-DC Converter With High Voltage Gain and Two Input Boost StagespandiОценок пока нет
- LCDДокумент4 страницыLCDpandiОценок пока нет
- Ultra Fast Acting Electronic Circuit BreakerДокумент55 страницUltra Fast Acting Electronic Circuit Breakerpandi60% (5)
- Controlling The Real World With Computers:::. Control and Embedded Systems .Документ89 страницControlling The Real World With Computers:::. Control and Embedded Systems .pandiОценок пока нет
- Appendix: Spy RobotДокумент28 страницAppendix: Spy RobotpandiОценок пока нет
- C W E F & W A M O: Ommercial IND Nergy Acility IND Ccess Odel RdinanceДокумент52 страницыC W E F & W A M O: Ommercial IND Nergy Acility IND Ccess Odel RdinancepandiОценок пока нет
- Denoising of Image Using WaveletsДокумент38 страницDenoising of Image Using WaveletspandiОценок пока нет
- 1 Flying Robot For Rescue Operation During Accidents and DisasterДокумент2 страницы1 Flying Robot For Rescue Operation During Accidents and DisasterpandiОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Word Formation ListДокумент8 страницWord Formation ListpaticiaОценок пока нет
- 120-21 TM RF HandbookДокумент164 страницы120-21 TM RF HandbookbaymanОценок пока нет
- Brushless MotorsДокумент20 страницBrushless Motorsbwatkins6Оценок пока нет
- KrautKramer DM4E DM4DL - ManualДокумент38 страницKrautKramer DM4E DM4DL - ManualfdsgfdgОценок пока нет
- Spectral Analysis of The ECG SignalДокумент2 страницыSpectral Analysis of The ECG SignalCamilo BenitezОценок пока нет
- The Man Who Named The CloudsДокумент7 страницThe Man Who Named The Cloudsapi-302345936Оценок пока нет
- 3393 - Supervision of Concrete Construction Volume 2Документ271 страница3393 - Supervision of Concrete Construction Volume 2Oum ChhayNoy100% (11)
- Komatsu Wheel Loaders Wa250pz 5 Shop ManualДокумент20 страницKomatsu Wheel Loaders Wa250pz 5 Shop Manualmarcia100% (48)
- IN804 UV-VIS Nomenclature and UnitsДокумент5 страницIN804 UV-VIS Nomenclature and UnitsAnurak OnnnoomОценок пока нет
- Physics 16 - Thermal ProcessesДокумент19 страницPhysics 16 - Thermal ProcessesSuhaan HussainОценок пока нет
- Morphometric Characterization of Jatropha Curcas Germplasm of North-East IndiaДокумент9 страницMorphometric Characterization of Jatropha Curcas Germplasm of North-East IndiafanusОценок пока нет
- Roman Helmet From SivacДокумент33 страницыRoman Helmet From SivacArachne DreamweaverОценок пока нет
- Plaquette-Costronic en 2020Документ2 страницыPlaquette-Costronic en 2020Jun OrtizОценок пока нет
- P16mba7 1Документ4 страницыP16mba7 1Vishalatchi MОценок пока нет
- Wind Tunnel Technique Notes For Aeronautical Engineers TP 2Документ6 страницWind Tunnel Technique Notes For Aeronautical Engineers TP 2Ramji VeerappanОценок пока нет
- Slot 22-23-24 Real Time CommunicationДокумент50 страницSlot 22-23-24 Real Time CommunicationLinh BuiОценок пока нет
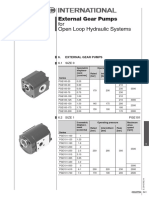
- External Gear Pumps For Open Loop Hydraulic SystemsДокумент2 страницыExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievОценок пока нет
- World Is Flat Thomas FriedmanДокумент10 страницWorld Is Flat Thomas FriedmanGilean DalidaОценок пока нет
- Press Releases Are Not A PR Strategy An Executive Annas ArchiveДокумент200 страницPress Releases Are Not A PR Strategy An Executive Annas Archivehelenajosemacuacua31Оценок пока нет
- SuperboltДокумент32 страницыSuperboltRajeev Chandel100% (1)
- FWD Week 47 Learning Material For Alaric YeoДокумент7 страницFWD Week 47 Learning Material For Alaric YeoarielОценок пока нет
- EE 720 - HW Set 3 - 1Документ2 страницыEE 720 - HW Set 3 - 1Abdullah AL-RazemОценок пока нет
- Day 2 - Determining The Relevance and Truthfulness of Ideas Presented in The Material Viewed (3rd Quarter)Документ12 страницDay 2 - Determining The Relevance and Truthfulness of Ideas Presented in The Material Viewed (3rd Quarter)Ella VeronaОценок пока нет
- Omnifocus ShortcutsДокумент3 страницыOmnifocus ShortcutsLaGouloueОценок пока нет
- Usama Lab 6Документ8 страницUsama Lab 6M mubeen riazОценок пока нет
- GRADE 8 3rd Quarter DLP in EnglishДокумент484 страницыGRADE 8 3rd Quarter DLP in EnglishJulius Salas100% (4)
- Ipcrf Core Values 2019 - FinalДокумент23 страницыIpcrf Core Values 2019 - FinalFrendelyn p. Gador100% (4)
- Gma 5013Документ10 страницGma 5013janurtpatОценок пока нет
- ISO 27001 Gap Analysis ChecklistДокумент6 страницISO 27001 Gap Analysis Checklistlijo jacob70% (10)
- Huawei FusionServer RH2288 V3 Data Sheet PDFДокумент2 страницыHuawei FusionServer RH2288 V3 Data Sheet PDFMartenMattisenОценок пока нет