Вам также может понравиться
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)От EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Рейтинг: 2 из 5 звезд2/5 (1)
- Caso de Estudio II Una Aplicación de ISOIEC 15504 para La Evaluación Por Niveles de Madurez de PYMEs PDFДокумент12 страницCaso de Estudio II Una Aplicación de ISOIEC 15504 para La Evaluación Por Niveles de Madurez de PYMEs PDFGian HerreraОценок пока нет
- Informe de Control On-Off Con HisteresisДокумент8 страницInforme de Control On-Off Con HisteresisAlex Toapanta Soto89% (9)
- Control de Temperatura Pid Usando ArduinoДокумент22 страницыControl de Temperatura Pid Usando ArduinoGiordano GarcíaОценок пока нет
- Control PID de Posición Angular de Un Motor DCДокумент11 страницControl PID de Posición Angular de Un Motor DCDaniel Santiago Cuervo Gómez100% (1)
- Informe Lab PT-100 Instru2Документ4 страницыInforme Lab PT-100 Instru2Juan Pablo PeñaОценок пока нет
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108От EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Оценок пока нет
- Diagrama de BodeДокумент25 страницDiagrama de BodeAndrea Alejandra Liñan Yauricasa100% (1)
- Control de Temperatura en Modo On - Off Con HisteresiДокумент5 страницControl de Temperatura en Modo On - Off Con Histeresicaballo-67% (3)
- Ajuste Empirico Del Controlador PidДокумент12 страницAjuste Empirico Del Controlador PidGrecia Palomino SalazarОценок пока нет
- Matriz Listado Maestros de Documentos y RegistrosДокумент4 страницыMatriz Listado Maestros de Documentos y RegistrosAndresLoaizaRuizОценок пока нет
- PLC ToshibaДокумент36 страницPLC ToshibaVooz NuñezОценок пока нет
- Manual para La Calculadora HP50G Con El Método de Hardy Cross - RenzoДокумент17 страницManual para La Calculadora HP50G Con El Método de Hardy Cross - RenzoRenzo Xavier Chavez Hurtado100% (3)
- Informe Comunicacion SerialДокумент21 страницаInforme Comunicacion Serialdavicho47100% (3)
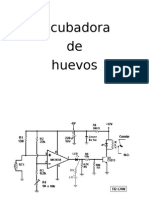
- Incubadora de HuevosДокумент4 страницыIncubadora de HuevosyonisfОценок пока нет
- Acondicionamiento de Señales para Un TermoparДокумент8 страницAcondicionamiento de Señales para Un Termoparosvaldo23Оценок пока нет
- Control de Posición de Un Servomotor Utilizando La Tarjeta de Desarrollo NEXYS 2 y VHDLДокумент6 страницControl de Posición de Un Servomotor Utilizando La Tarjeta de Desarrollo NEXYS 2 y VHDLSandoval DanielОценок пока нет
- Control de Temperatura en LCДокумент3 страницыControl de Temperatura en LCDavid SanchezОценок пока нет
- Proyecto Instrumentacion Electronica 1Документ12 страницProyecto Instrumentacion Electronica 1Nicolas ValbuenaОценок пока нет
- Informe de Lab 02 Termistor NTCДокумент9 страницInforme de Lab 02 Termistor NTCRaúl QC0% (1)
- Practica Termometro Digital PDFДокумент5 страницPractica Termometro Digital PDFWicho AntonioОценок пока нет
- Osciloscopio ProteusДокумент10 страницOsciloscopio ProteusMary Lourdes Salazar GonzalezОценок пока нет
- Pre Informe Detector Cruze Por CeroДокумент10 страницPre Informe Detector Cruze Por CeroRicardo Alfonso Martínez AzaОценок пока нет
- Presentacion PLDsДокумент112 страницPresentacion PLDsAlejandro BejaranoОценок пока нет
- Informe Laboratorio #3 Automatizacion Industrial GRAFCET PDFДокумент12 страницInforme Laboratorio #3 Automatizacion Industrial GRAFCET PDFDexter Fernando AlconОценок пока нет
- Digitales FormularioДокумент2 страницыDigitales FormularioMaria Jose Delgado ArceОценок пока нет
- LM35 LaboratorioДокумент14 страницLM35 LaboratorioYesse BermeoОценок пока нет
- Terminales EléctricosДокумент4 страницыTerminales EléctricosJose Manuel Gutierrez PachasОценок пока нет
- Circuito de Muestreo y RetencionДокумент17 страницCircuito de Muestreo y RetencionMuestrame Tu MundoОценок пока нет
- Informe Practica 2 On-Off TemperaturaДокумент7 страницInforme Practica 2 On-Off TemperaturaLimbert ToledoОценок пока нет
- Introducción A PIC16F877aДокумент3 страницыIntroducción A PIC16F877aandre izakОценок пока нет
- Reporte 4 Control de TemperaturaДокумент18 страницReporte 4 Control de Temperaturajose joseОценок пока нет
- PROYECTO Termometro DigitalДокумент5 страницPROYECTO Termometro DigitalJoel Rubiano ArevaloОценок пока нет
- Linealización de Una Termocupla Tipo KДокумент5 страницLinealización de Una Termocupla Tipo KMauro AntiveroОценок пока нет
- Erradura Electronica Mediante Pic 16f877aДокумент8 страницErradura Electronica Mediante Pic 16f877aVictor Edwin Calderon LezamaОценок пока нет
- Laboratorio #1Документ6 страницLaboratorio #1Hosmmer RojasОценок пока нет
- Modulador y Demodulador Am Practica de LabДокумент3 страницыModulador y Demodulador Am Practica de LabRihe CaОценок пока нет
- Informe 1 Microporcesadores 1Документ4 страницыInforme 1 Microporcesadores 1Rodrigo CoriaОценок пока нет
- Preguntas Instrumentacion PDFДокумент4 страницыPreguntas Instrumentacion PDFELIZABETHОценок пока нет
- PRACTICA No 2 Fijadores de NivelДокумент5 страницPRACTICA No 2 Fijadores de NivelleycaporsiempreОценок пока нет
- Practica Caracterizacion SensoresДокумент6 страницPractica Caracterizacion SensoresAMADO MACOSAY MARINОценок пока нет
- Acondicionamiento de SeñalesДокумент18 страницAcondicionamiento de SeñalesMigue Cabrera100% (2)
- Trabajo InformeДокумент15 страницTrabajo InformePiero VeraОценок пока нет
- MultisimДокумент5 страницMultisimDavid Adolfo Paez MolinaОценок пока нет
- Dimmer Digital Con ArduinoДокумент6 страницDimmer Digital Con ArduinoIsmael SantanderОценок пока нет
- Informe AlcoholimetroДокумент5 страницInforme AlcoholimetroLizeth Gonzalez GuzmánОценок пока нет
- Taller 3 InstrumentaciónДокумент9 страницTaller 3 InstrumentaciónJuan David Ramirez Amariles0% (1)
- Circuito de Media Onda y Onda CompletaДокумент14 страницCircuito de Media Onda y Onda CompletaWilliam Lopez100% (1)
- Instrucciones Orientadas A RegistrosДокумент41 страницаInstrucciones Orientadas A RegistrosChristian UbillusОценок пока нет
- Generador de PWM Usando SG3524Документ7 страницGenerador de PWM Usando SG3524Miguel Ángel Flores TicayОценок пока нет
- Manejo de Punto Flotante en Pic Basic Pro PlusДокумент14 страницManejo de Punto Flotante en Pic Basic Pro PlusFatality Joseph100% (1)
- Protocolo de Comunicación HARTДокумент11 страницProtocolo de Comunicación HARTGregori Missini G.Оценок пока нет
- Practica 3 El Opamp en Lazo AbiertoДокумент4 страницыPractica 3 El Opamp en Lazo AbiertoOssiel LealОценок пока нет
- Reloj Digital 24 HorasДокумент5 страницReloj Digital 24 HorasAdriana tofiño villafañe100% (1)
- Controlador PID Por Asignación de PolosДокумент3 страницыControlador PID Por Asignación de PolosMichelle DiazОценок пока нет
- Diseño e Implementacion de Un Circuito de Acondicionamiento de La Señal para Una Termocupla Tipo KДокумент3 страницыDiseño e Implementacion de Un Circuito de Acondicionamiento de La Señal para Una Termocupla Tipo KDiego Castro PlazasОценок пока нет
- Termopar Tipo KДокумент7 страницTermopar Tipo KAnonymous IoreTDh7Оценок пока нет
- Etapa de Potencia para Un Motor de Corriente ContinuaДокумент12 страницEtapa de Potencia para Un Motor de Corriente Continuajflores_886366100% (1)
- OPamp's PromediadorДокумент4 страницыOPamp's PromediadorMauricio SalazarОценок пока нет
- Ejercicios Conversion AdcДокумент2 страницыEjercicios Conversion AdcJessica Lorena Forero Castro100% (1)
- Descripcion Proyecto 1 PDFДокумент3 страницыDescripcion Proyecto 1 PDFAndres GonzalezОценок пока нет
- Proyecto. Sistema de Control de Temperatura. Ricardo Felipe Jiménez SotoДокумент12 страницProyecto. Sistema de Control de Temperatura. Ricardo Felipe Jiménez SotoRicardoJimenezОценок пока нет
- Lab2.Controladores de ProcesoДокумент16 страницLab2.Controladores de ProcesoErlita TerronesОценок пока нет
- Informe Lab3Документ10 страницInforme Lab3salvaОценок пока нет
- Laboratorio 4 Control IIДокумент10 страницLaboratorio 4 Control IIDaniel Santiago Cuervo GómezОценок пока нет
- Informe Proyecto 3 Control 1 Ball BeamДокумент11 страницInforme Proyecto 3 Control 1 Ball BeamDaniel Santiago Cuervo GómezОценок пока нет
- Análisis Armónico Conmutación SPWMДокумент5 страницAnálisis Armónico Conmutación SPWMDaniel Santiago Cuervo GómezОценок пока нет
- ZmatchPy - Acople de Impedancias en La Carta de SmithДокумент2 страницыZmatchPy - Acople de Impedancias en La Carta de SmithDaniel Santiago Cuervo GómezОценок пока нет
- Guía en Pla y Proyectos NERY DIAZДокумент2 страницыGuía en Pla y Proyectos NERY DIAZYani Marisol Quevedo DonisОценок пока нет
- Marketing Digital II DesaДокумент5 страницMarketing Digital II DesaKap KaneОценок пока нет
- Material Apoyo Uso Herramientas OfimaticasДокумент75 страницMaterial Apoyo Uso Herramientas Ofimaticascarmenbeatrizhl100% (1)
- Introducción A La Verificación de ProgramasДокумент26 страницIntroducción A La Verificación de ProgramasJoaquín Borrego-DíazОценок пока нет
- Implementación SoftwareДокумент69 страницImplementación SoftwareEduardo de jesus lopez mendezОценок пока нет
- Plan de Recuperación de DesastresДокумент3 страницыPlan de Recuperación de DesastresDCS3 “dcs3tour” DesestresОценок пока нет
- BD I 03-Algebra-Rel-20Документ19 страницBD I 03-Algebra-Rel-20Adriana Gpe Mendoza LanderoОценок пока нет
- Exposicion 06-12Документ20 страницExposicion 06-12Gustavo HuertasОценок пока нет
- Parte Escrita Chatbot CRДокумент4 страницыParte Escrita Chatbot CRGabriel CorralesОценок пока нет
- Fundamentos AefДокумент11 страницFundamentos AefJhõršhîtö ÄÏönêОценок пока нет
- Material Didactico AutocadДокумент340 страницMaterial Didactico AutocadMarvin OrtizОценок пока нет
- Tarea 6. Métodos López Castañón América RubíДокумент5 страницTarea 6. Métodos López Castañón América RubíAmérica CastañónОценок пока нет
- Practica 11Документ13 страницPractica 11Fernando VenegasОценок пока нет
- Vehiculos TermodinámicaДокумент18 страницVehiculos TermodinámicaJuan FernandoОценок пока нет
- Comando AtribДокумент8 страницComando Atribvalentina59Оценок пока нет
- Excel para Estudiantes de IngenieriaДокумент87 страницExcel para Estudiantes de IngenieriaNieves Elisa PlacenciaОценок пока нет
- Practicas de Fundamentos de Programacion de Sistemas PDFДокумент15 страницPracticas de Fundamentos de Programacion de Sistemas PDFJuan Vargas FerrerОценок пока нет
- Paper Base de Datos DistribuidaДокумент3 страницыPaper Base de Datos DistribuidaCarlos Albuja FloresОценок пока нет
- Manual SIRIUS Circuit Breaker 3RV Es-MXДокумент230 страницManual SIRIUS Circuit Breaker 3RV Es-MXFredy Aparco IngaОценок пока нет
- Tecsup PDFДокумент3 страницыTecsup PDFuyhvuhvuvОценок пока нет
- Funciones 2Документ6 страницFunciones 2jose daniel alfonso rojasОценок пока нет
- Manual de Usuario Primera Entrega SamyДокумент10 страницManual de Usuario Primera Entrega SamySamy David JОценок пока нет
- WPR-IN-SD-02 Visualización de Pedidos y Facturas de Venta V.01Документ33 страницыWPR-IN-SD-02 Visualización de Pedidos y Facturas de Venta V.01Ray Rivera CruzОценок пока нет
- Graiman Mision VicionДокумент133 страницыGraiman Mision VicionDiego Montero100% (1)
- Ejercicios Metodo GraficoДокумент1 страницаEjercicios Metodo GraficosoniarodasОценок пока нет
- Calculadara y ExcelДокумент27 страницCalculadara y ExcelEli DamnОценок пока нет
- LienzocanvasespanolДокумент1 страницаLienzocanvasespanolJuan P. SalinasОценок пока нет