Вам также может понравиться
- Insulated Gate Bipolar TransistorДокумент20 страницInsulated Gate Bipolar TransistorUmashankar SubramaniamОценок пока нет
- Installing Apache On Ubuntu 18.04 With Multiple Domains: PrerequisitesДокумент13 страницInstalling Apache On Ubuntu 18.04 With Multiple Domains: PrerequisitesreafОценок пока нет
- Diagnostic Imaging: Medical RadiologyДокумент299 страницDiagnostic Imaging: Medical RadiologyEdith CroitoruОценок пока нет
- P9 Elite 20221025Документ4 страницыP9 Elite 20221025Chai AlvarezОценок пока нет
- Cardiovascular Pathology: Professor Mircea BuruianДокумент174 страницыCardiovascular Pathology: Professor Mircea BuruianDiana PopoviciОценок пока нет
- Mpiirwe Ramadhan Registration Number: 2018/MMSC/046/PS Mbarara University of Science and TechnologyДокумент2 страницыMpiirwe Ramadhan Registration Number: 2018/MMSC/046/PS Mbarara University of Science and Technologympiirwe ramadhanОценок пока нет
- 08 Lecture Power Transistors (IGBT)Документ22 страницы08 Lecture Power Transistors (IGBT)Abid Hasan HimelОценок пока нет
- IGBT's Application Note EngДокумент38 страницIGBT's Application Note Engospidera100% (1)
- Drives and SoftstarterДокумент7 страницDrives and SoftstarterElectrification100% (1)
- Ultrafast Soft Recovery Rectifier Diode Features and BenefitsДокумент4 страницыUltrafast Soft Recovery Rectifier Diode Features and BenefitsViktor RudanОценок пока нет
- Uganda Local NamesДокумент40 страницUganda Local NamesAiuba SuleimanaОценок пока нет
- NFC Institute EE-405 Lab Manual VLSI Design ExperimentsДокумент48 страницNFC Institute EE-405 Lab Manual VLSI Design ExperimentsMohib KhanОценок пока нет
- Dicom para Ecografo Toshiba Ssa 530aДокумент23 страницыDicom para Ecografo Toshiba Ssa 530aMaryfer AlbОценок пока нет
- Microsemi Make Linear Mode WorkДокумент6 страницMicrosemi Make Linear Mode WorkrauolОценок пока нет
- POGS ISIS Excel INSTRUCTIONSДокумент24 страницыPOGS ISIS Excel INSTRUCTIONSjojolilimomoОценок пока нет
- Infineon IDH12G65C5 DS v02 02 enДокумент11 страницInfineon IDH12G65C5 DS v02 02 enHauvuОценок пока нет
- Dotnet FrameworkДокумент60 страницDotnet FrameworkHarishОценок пока нет
- DC-to-AC and AC-to-AC converters guideДокумент35 страницDC-to-AC and AC-to-AC converters guidejck07100% (1)
- Modelling Latches and FlipflopsДокумент9 страницModelling Latches and Flipflopsmachnik1486624Оценок пока нет
- MicroSemi PIN Handbook PDFДокумент137 страницMicroSemi PIN Handbook PDFSinisa HristovОценок пока нет
- Hspice TutorialДокумент22 страницыHspice TutorialRalph MartinezОценок пока нет
- PDK Reference ManualДокумент85 страницPDK Reference ManualIrfanAhmadОценок пока нет
- Scilab Textbook Companion for Discrete MathematicsДокумент62 страницыScilab Textbook Companion for Discrete MathematicsJavierDhi MBОценок пока нет
- MontecarloДокумент44 страницыMontecarloAnand Krishna GhattyОценок пока нет
- Speed Control of Three Phase Induction MotorДокумент14 страницSpeed Control of Three Phase Induction MotorNaiduОценок пока нет
- Opamp (Ota) Design: The Design Process Involves Two Distinct Activities: - Architecture DesignДокумент87 страницOpamp (Ota) Design: The Design Process Involves Two Distinct Activities: - Architecture DesignKumar GaneshОценок пока нет
- BCD Lite Data SheetДокумент5 страницBCD Lite Data SheetBenjamin DoverОценок пока нет
- Silvaco ATHENA Description 4Документ21 страницаSilvaco ATHENA Description 4Nabilah AzizОценок пока нет
- Chapter A 1Документ3 страницыChapter A 1Kiran ShettyОценок пока нет
- 1501 - Introduction To Process Modeling MethodologyДокумент103 страницы1501 - Introduction To Process Modeling Methodologykotafi_atefОценок пока нет
- Tutorial PADRE Simulation ToolsДокумент45 страницTutorial PADRE Simulation Toolsss626Оценок пока нет
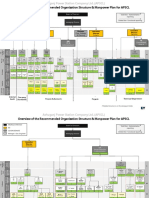
- APSCL-Organogram Ver08062016Документ4 страницыAPSCL-Organogram Ver08062016Mahir AsefОценок пока нет
- Lecture21 TimingДокумент16 страницLecture21 TimingUtkarsh JainОценок пока нет
- MRI and CT of The Cardiovascular SystemДокумент692 страницыMRI and CT of The Cardiovascular SystemMariluzArangoОценок пока нет
- JMP Doe (Design of Experiment) Guide-SAS Institute Inc (2004) PDFДокумент196 страницJMP Doe (Design of Experiment) Guide-SAS Institute Inc (2004) PDFBrijKishoreSinghОценок пока нет
- Design Procedures for a Fully Differential Folded-Cascode CMOS Op AmpДокумент4 страницыDesign Procedures for a Fully Differential Folded-Cascode CMOS Op AmpwleaderheeОценок пока нет
- User Guide To Excel Macros: For The MED-AB ProjectДокумент27 страницUser Guide To Excel Macros: For The MED-AB Projectanuj3936Оценок пока нет
- Test Bench For RomДокумент2 страницыTest Bench For Rommnpaliwal020100% (1)
- Getting Started Free CadДокумент13 страницGetting Started Free CadproftononОценок пока нет
- RTL Design Using VHDLДокумент15 страницRTL Design Using VHDLJoshua KumaresanОценок пока нет
- IBM ASIC-SoC MethodologyДокумент12 страницIBM ASIC-SoC Methodologyghatakp2069Оценок пока нет
- Begin Parallel Programming With OpenMP - CodeProjectДокумент8 страницBegin Parallel Programming With OpenMP - CodeProjectManojSudarshanОценок пока нет
- HAL401 Linear Hall Effect Sensor IC (DSH000018002EN)Документ20 страницHAL401 Linear Hall Effect Sensor IC (DSH000018002EN)MaxОценок пока нет
- Circuit Simulation Lab 2Документ9 страницCircuit Simulation Lab 2Bhushan RaneОценок пока нет
- SMPS Design TutorialДокумент18 страницSMPS Design TutorialRuve Baba100% (6)
- Cadence Nclaunch LabДокумент86 страницCadence Nclaunch Labsweety987Оценок пока нет
- VHDL FirДокумент21 страницаVHDL FirSiva ChaitanyaОценок пока нет
- Circuit Design Simulation and Virtual InstrumentationДокумент31 страницаCircuit Design Simulation and Virtual InstrumentationSanket DaveОценок пока нет
- Willson MirrorДокумент7 страницWillson Mirrorsandeep_mastiОценок пока нет
- SJSU Electrical Engineering Silvaco TutorialДокумент54 страницыSJSU Electrical Engineering Silvaco Tutorialzerigui100% (1)
- MOSFET Power Losses Calculation Using The Data-Sheet ParametersДокумент23 страницыMOSFET Power Losses Calculation Using The Data-Sheet ParametersElvis Yu0% (1)
- MOSFET Power Losses Calculation Using The Data-Sheet ParametersДокумент23 страницыMOSFET Power Losses Calculation Using The Data-Sheet ParametersAftab AhmedОценок пока нет
- Calculation of Turn-Off Power Losses Generated by An Ultrafast DiodeДокумент20 страницCalculation of Turn-Off Power Losses Generated by An Ultrafast DiodeWesley de PaulaОценок пока нет
- El T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersДокумент23 страницыEl T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersSaied Aly SalamahОценок пока нет
- Boost Converter Circuit Diagram Key Waveforms ExplainedДокумент5 страницBoost Converter Circuit Diagram Key Waveforms ExplainedwizardgrtОценок пока нет
- Improved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersДокумент10 страницImproved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersEdamEdamОценок пока нет
- Solutions Exam 2001Документ17 страницSolutions Exam 2001bmmostefaОценок пока нет
- EEEE4122 - MATLAB & SIMULINK Coursework (2022/23) : Student Name: Student IDДокумент11 страницEEEE4122 - MATLAB & SIMULINK Coursework (2022/23) : Student Name: Student IDEugeneОценок пока нет
- Ring OscillatorДокумент13 страницRing OscillatorAnonymous eWMnRr70qОценок пока нет
- Infineon AN2008 02Документ41 страницаInfineon AN2008 02Elvis Yu100% (1)
- Design - Tips - Dec06 + Gate Drive Design TipsДокумент3 страницыDesign - Tips - Dec06 + Gate Drive Design TipsElvis YuОценок пока нет
- Unsymmetrical Gate Voltage Drive For High Power 1200V IGBT 4 Modules Based On Coreless Transformer Technology DriverДокумент9 страницUnsymmetrical Gate Voltage Drive For High Power 1200V IGBT 4 Modules Based On Coreless Transformer Technology DriverElvis YuОценок пока нет
- Zing Continuous-Time ModelsДокумент8 страницZing Continuous-Time ModelsElvis YuОценок пока нет
- Discretization of Simulator, Lter, and PID ControllerДокумент10 страницDiscretization of Simulator, Lter, and PID ControllerElvis YuОценок пока нет
- Digital Design With Synthesizable VHDLДокумент98 страницDigital Design With Synthesizable VHDLElvis YuОценок пока нет
- Controller Tuning From Speci Ed Characteristic PolynomialДокумент8 страницController Tuning From Speci Ed Characteristic PolynomialElvis YuОценок пока нет
- 2003 - Discretization Method DC MotorДокумент4 страницы2003 - Discretization Method DC MotorTheodoroFirmoОценок пока нет
- Dsp/biosДокумент71 страницаDsp/biosElvis YuОценок пока нет
- Linear ControlДокумент22 страницыLinear ControlElvis YuОценок пока нет
- PID - Control & Ziegler-NicholsДокумент36 страницPID - Control & Ziegler-NicholsHachemi BheОценок пока нет
- (Ebook) - Labview - Pid Control Toolset - User Manual - 11'2001 PDFДокумент180 страниц(Ebook) - Labview - Pid Control Toolset - User Manual - 11'2001 PDFmekanicobucaroОценок пока нет
- American Wire GaugeДокумент2 страницыAmerican Wire GaugeElvis YuОценок пока нет
- Energy StatДокумент82 страницыEnergy StatengrabdulhananОценок пока нет
- PidДокумент10 страницPidElvis YuОценок пока нет
- MOSFET Power Losses Calculation Using The Data-Sheet ParametersДокумент23 страницыMOSFET Power Losses Calculation Using The Data-Sheet ParametersElvis Yu0% (1)
- Acids and Bases: William L Masterton Cecile N. Hurley Edward J. NethДокумент91 страницаAcids and Bases: William L Masterton Cecile N. Hurley Edward J. NethRezel C. PerezОценок пока нет
- 3 Phase Imbalance Detection Using CR7310 SensorДокумент1 страница3 Phase Imbalance Detection Using CR7310 Sensorr.veenaaОценок пока нет
- Arduino Portenta H7: FeaturesДокумент22 страницыArduino Portenta H7: Featuresssprakoso_gmailОценок пока нет
- EnergyMetering Installation ManualДокумент12 страницEnergyMetering Installation ManualpatzucОценок пока нет
- 9619 Philips 40PFL4708-F7 40PFL4708-F8 40PFL4908-F7 40PFL4908-F8 Chassis PL13.13 Televisor LCD Manual de ServicioДокумент78 страниц9619 Philips 40PFL4708-F7 40PFL4708-F8 40PFL4908-F7 40PFL4908-F8 Chassis PL13.13 Televisor LCD Manual de ServicioJuan Garcia Hernandez100% (1)
- 33kV Breaker - GTPДокумент7 страниц33kV Breaker - GTPMohan ThakurОценок пока нет
- Digital Laser MFP SCX-6322DN Service ManualДокумент185 страницDigital Laser MFP SCX-6322DN Service ManualjaimecamoОценок пока нет
- Regulated Power Supply, 100 To 240V AC, 24V, 2.5A, Single Phase, ModularДокумент11 страницRegulated Power Supply, 100 To 240V AC, 24V, 2.5A, Single Phase, ModularDodongОценок пока нет
- 33KV Incoming Feeder Circuit BreakerДокумент2 страницы33KV Incoming Feeder Circuit BreakerMD. Mazidul Islam MahfujОценок пока нет
- MRC Pylon Racer PDFДокумент16 страницMRC Pylon Racer PDFAlexandra SpătăreluОценок пока нет
- Day 3 Slot 3 Mid Sm23 SummerДокумент32 страницыDay 3 Slot 3 Mid Sm23 SummerNayeem SarkarОценок пока нет
- Real Time KernelsДокумент39 страницReal Time KernelsHamdan Mahat0% (1)
- DEWA Circular - General Earthing ArrangementДокумент1 страницаDEWA Circular - General Earthing Arrangementnirmal mohanОценок пока нет
- Simulation of Boost ConverterДокумент9 страницSimulation of Boost ConverterMuhammad DanialОценок пока нет
- Multi Format Broadcast LCD Monitor: Operation Manual - v1.0Документ36 страницMulti Format Broadcast LCD Monitor: Operation Manual - v1.0Sergio MorenoОценок пока нет
- ECE 410 Digital Signal Processing D. Munson University of Illinois A. SingerДокумент26 страницECE 410 Digital Signal Processing D. Munson University of Illinois A. SingerFreddy PesantezОценок пока нет
- Furse Earth DetailsДокумент43 страницыFurse Earth DetailsrkssОценок пока нет
- 33kv Abb GisДокумент21 страница33kv Abb GisViresh ShaunakОценок пока нет
- US Burkert USA SelectДокумент88 страницUS Burkert USA SelectSergiSerranoОценок пока нет
- EU Declaration of Conformity: XFP Analogue Addressable Fire PanelsДокумент1 страницаEU Declaration of Conformity: XFP Analogue Addressable Fire PanelsAdrian SudituОценок пока нет
- Optimus STAV-3370 Digital Synthesized A/V Surround Receiver Owner's ManualДокумент32 страницыOptimus STAV-3370 Digital Synthesized A/V Surround Receiver Owner's ManualShane ShaneОценок пока нет
- The Design Seismic Coefficient of The Embedding Foundation of Building StructuresДокумент9 страницThe Design Seismic Coefficient of The Embedding Foundation of Building StructuresWaldemar Cepeda MurilloОценок пока нет
- Roadsync Java Midp 2.0 ManualДокумент18 страницRoadsync Java Midp 2.0 Manualap1123Оценок пока нет
- Free Energy Ws John BediniДокумент4 страницыFree Energy Ws John Bedinigui9871Оценок пока нет
- Hebt 5VДокумент28 страницHebt 5VSergio ObandoОценок пока нет
- Eele461 Module 07Документ48 страницEele461 Module 07cdcrossroaderОценок пока нет
- 2007 RAM 1500 3.7L V6 P0509 IAC Valve Circuit HighДокумент4 страницы2007 RAM 1500 3.7L V6 P0509 IAC Valve Circuit HighWillie AustineОценок пока нет
- Electric Linear Actuators and Controls Full enДокумент51 страницаElectric Linear Actuators and Controls Full ensaleemut3Оценок пока нет
- The Webcam HOWTOДокумент18 страницThe Webcam HOWTOLuiz TorreОценок пока нет
- CBSE Class 12th Physics Sample EbookДокумент16 страницCBSE Class 12th Physics Sample EbookmisostudyОценок пока нет