Вам также может понравиться
- Spring Wind UpДокумент8 страницSpring Wind UpAvinashRaiОценок пока нет
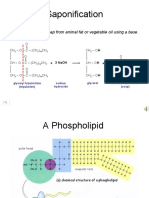
- Saponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseДокумент14 страницSaponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseAvinashRaiОценок пока нет
- 48 WordNet Tulu ShivakumarДокумент7 страниц48 WordNet Tulu ShivakumarAvinashRaiОценок пока нет
- Yoga Is UsedДокумент42 страницыYoga Is UsedAvinashRaiОценок пока нет
- FatigueДокумент10 страницFatigueAvinashRaiОценок пока нет
- Cocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)Документ80 страницCocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)AvinashRaiОценок пока нет
- CasshewДокумент11 страницCasshewAvinashRaiОценок пока нет
- AJSE December2009 Lowres PDFДокумент14 страницAJSE December2009 Lowres PDFAvinashRaiОценок пока нет
- BharatanatyamДокумент4 страницыBharatanatyamAvinashRaiОценок пока нет
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleДокумент87 страницLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiОценок пока нет
- FG IronДокумент23 страницыFG IronAvinashRaiОценок пока нет
- Design and Analysis of Independent Suspension System Using FEAДокумент7 страницDesign and Analysis of Independent Suspension System Using FEAAvinashRaiОценок пока нет
- Customer ID Why Did You Purchase Hotstar Premium?Документ4 страницыCustomer ID Why Did You Purchase Hotstar Premium?AvinashRaiОценок пока нет
- Dynamic Systems and Control: Associate Professor, Department of Engineering DesignДокумент1 страницаDynamic Systems and Control: Associate Professor, Department of Engineering DesignAvinashRaiОценок пока нет
- Experimental Evaluation Trailing Arm Susp Thesis PDFДокумент141 страницаExperimental Evaluation Trailing Arm Susp Thesis PDFAvinashRaiОценок пока нет
- Absolute PDFДокумент1 страницаAbsolute PDFAvinashRaiОценок пока нет
- About Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorДокумент17 страницAbout Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorAvinashRaiОценок пока нет
- Machine Design Ball Screw Vol 1 e BookДокумент22 страницыMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीОценок пока нет
- Belts Drives 5Документ11 страницBelts Drives 5AvinashRaiОценок пока нет
- Yang Hyundai Final 2232012lДокумент7 страницYang Hyundai Final 2232012lAvinashRaiОценок пока нет
- Epe20120400004 37611614Документ7 страницEpe20120400004 37611614AvinashRaiОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Problem Statement - Chem e CarДокумент9 страницProblem Statement - Chem e Carhimanshucool21Оценок пока нет
- Lancer (CY, CX) : Lubricants and FluidsДокумент4 страницыLancer (CY, CX) : Lubricants and Fluidsاشرف صابرОценок пока нет
- 21 60 03arevДокумент4 страницы21 60 03arevAdal VeraОценок пока нет
- Project Guide - Generator SetДокумент99 страницProject Guide - Generator Setkarthikmanikandan1234Оценок пока нет
- Biodiesel: An Alternative Fuel and Its Emission Effect: Yogendra Prasad Upadhyay, R.B.SharmaДокумент4 страницыBiodiesel: An Alternative Fuel and Its Emission Effect: Yogendra Prasad Upadhyay, R.B.SharmaInternational Organization of Scientific Research (IOSR)Оценок пока нет
- JCB 3CX - 4CX - 214 - 214e - 215 - 217 PDF Service Manual - Part178Документ5 страницJCB 3CX - 4CX - 214 - 214e - 215 - 217 PDF Service Manual - Part178mojbarОценок пока нет
- Inst Cylinder HeadДокумент8 страницInst Cylinder Headmanuel1357100% (1)
- 2018 ZR 200 PDFДокумент70 страниц2018 ZR 200 PDFralfsiemensОценок пока нет
- Weedeater Manual BV1650-BV1800Документ9 страницWeedeater Manual BV1650-BV1800SpirockОценок пока нет
- APL CUMMINS QSK23-C.xlsx2021-9-22-quoted by TerryДокумент2 страницыAPL CUMMINS QSK23-C.xlsx2021-9-22-quoted by Terryirawan budi santosaОценок пока нет
- Caterpillar 3054C Engine Service Manual 1096 PáginasДокумент1 096 страницCaterpillar 3054C Engine Service Manual 1096 PáginasOdon Ticona YuanquiОценок пока нет
- Yamaha Ft60dehd Ft60deht Ft60det 2012Документ71 страницаYamaha Ft60dehd Ft60deht Ft60det 2012Eduardo CortezОценок пока нет
- NC250 Engine ManualДокумент60 страницNC250 Engine ManualTallerSoldaduraAluminioInoxidable67% (3)
- Electronic Diesel Control Is A Diesel Engine Fuel InjectionДокумент4 страницыElectronic Diesel Control Is A Diesel Engine Fuel InjectionRoberto Ortega MicalizziОценок пока нет
- Service Manual: T2500/T2510/T3410 Trimmer/Brushcutter With C Technology Four-Stroke EngineДокумент24 страницыService Manual: T2500/T2510/T3410 Trimmer/Brushcutter With C Technology Four-Stroke EngineWilliam Jose Espinosa MontenegroОценок пока нет
- s50mc-c 01 PartsДокумент844 страницыs50mc-c 01 PartsWagner GuimarãesОценок пока нет
- Diesel & Gas Power plant-PPE - Unit-IIДокумент14 страницDiesel & Gas Power plant-PPE - Unit-IISacet 2003Оценок пока нет
- Foton Faw Shacman Sinotuck Howo Truck Spare Parts From Cinaautoparts GroupДокумент284 страницыFoton Faw Shacman Sinotuck Howo Truck Spare Parts From Cinaautoparts GroupCINA auto partsОценок пока нет
- Service Guide L150F 2007-08-22Документ4 страницыService Guide L150F 2007-08-22Injeletro Diesel100% (1)
- PRD Assignment 1Документ5 страницPRD Assignment 1sulthan shadiqahОценок пока нет
- A320 70 cfm56Документ18 страницA320 70 cfm56morteeza1986100% (2)
- Thermodynamics LAB REPORTS UW-19-ME-BSC-029 Usman AliДокумент50 страницThermodynamics LAB REPORTS UW-19-ME-BSC-029 Usman Aliعثمان علیОценок пока нет
- BB2920-04 Cylinder Block-1Документ5 страницBB2920-04 Cylinder Block-1Volcambus SacОценок пока нет
- GSX s150m1Документ77 страницGSX s150m1andres parragaОценок пока нет
- Pistons and Connecting Rods - InstallДокумент4 страницыPistons and Connecting Rods - InstallPutra Jawa100% (1)
- ISUZU - Manual Common Rail Motor Isuzu 6DE1-1 PDFДокумент35 страницISUZU - Manual Common Rail Motor Isuzu 6DE1-1 PDFAngelОценок пока нет
- Lect 41Документ19 страницLect 41kkkrajaОценок пока нет
- Perkins Boletin MotorДокумент7 страницPerkins Boletin MotorWilliams Araya100% (1)
- Exhaust BackpressureДокумент4 страницыExhaust Backpressurecatalin555Оценок пока нет
- Mercedes Sangyong Section+1A2++M161+Engine PDFДокумент254 страницыMercedes Sangyong Section+1A2++M161+Engine PDFjonasОценок пока нет