Вам также может понравиться
- Métodos Matriciales para ingenieros con MATLABОт EverandMétodos Matriciales para ingenieros con MATLABРейтинг: 5 из 5 звезд5/5 (1)
- Pau TextoДокумент209 страницPau TextoJHERSON FARFAN CUEVASОценок пока нет
- Cancionero CCUДокумент9 страницCancionero CCUBeymar Casas FernandezОценок пока нет
- Pre MultiplicacionДокумент2 страницыPre MultiplicacionJose Ignacio Lopez AlmanzaОценок пока нет
- Tonchy Oropeza-Yo Quiero Acordes By: Nows "Ivan C.A"Документ1 страницаTonchy Oropeza-Yo Quiero Acordes By: Nows "Ivan C.A"Yvan Colque AquinoОценок пока нет
- Geometria Bidimensional Ecuacion de La Recta PDFДокумент13 страницGeometria Bidimensional Ecuacion de La Recta PDFKevin GuerraОценок пока нет
- (Práctica #5 - I - 2013) PDFДокумент4 страницы(Práctica #5 - I - 2013) PDFCristian MattaОценок пока нет
- Anatomia Del Sistema Cardionector PDFДокумент17 страницAnatomia Del Sistema Cardionector PDFJorge Solar RosselОценок пока нет
- Números Cuánticos 1Документ51 страницаNúmeros Cuánticos 1Darwin sernaque lescanoОценок пока нет
- Herramientas Matemáticas para La Ubicación EspacialДокумент5 страницHerramientas Matemáticas para La Ubicación EspacialJuan c sanchezОценок пока нет
- Definir Musculos Somiticos y Mencionar Su Origen.Документ11 страницDefinir Musculos Somiticos y Mencionar Su Origen.Joseph Michael LealОценок пока нет
- Propuesta de Ruta de Trabajo para El Buen Inicio Del Año Escolar 2022Документ2 страницыPropuesta de Ruta de Trabajo para El Buen Inicio Del Año Escolar 2022Leopoldo Mendoza RodriguezОценок пока нет
- Guias de Laboratorio Control y Automatización IndustrialДокумент3 страницыGuias de Laboratorio Control y Automatización IndustrialDaniel Dorado ClavijoОценок пока нет
- Primer ABP-Efecto ComptònДокумент19 страницPrimer ABP-Efecto ComptònherosandovalОценок пока нет
- Pre y Post MultiplicacionДокумент9 страницPre y Post MultiplicacionMiguel PradoОценок пока нет
- Formulario RobotДокумент11 страницFormulario RobotDaniel VazquezОценок пока нет
- TEMA 4 Herramientas Matemáticas para La Localización Ejercicios Solució - OCW - Revision1Документ29 страницTEMA 4 Herramientas Matemáticas para La Localización Ejercicios Solució - OCW - Revision1KevinRamsesBetancourtОценок пока нет
- Practica 3Документ34 страницыPractica 3Jose OlazabalОценок пока нет
- Denavit HartenbergДокумент7 страницDenavit HartenbergErick Martins Quispe GutierrezОценок пока нет
- Taller RoboticaДокумент10 страницTaller RoboticaxavierОценок пока нет
- Deber EjerciciosДокумент23 страницыDeber EjerciciosxavierОценок пока нет
- CORRECCION1Документ13 страницCORRECCION1Lucia CorderoОценок пока нет
- Taller de Robotica 2 JPMGДокумент9 страницTaller de Robotica 2 JPMGJP MGОценок пока нет
- Control de Lectura N°3Документ13 страницControl de Lectura N°3Kris Karol Mayta BarreraОценок пока нет
- Informe 1Документ8 страницInforme 1Martín NarvaezОценок пока нет
- Brazo RobóticoДокумент21 страницаBrazo RobóticoAmanda Zeledon100% (1)
- Denavit Hartenberg Marco TeoricoДокумент4 страницыDenavit Hartenberg Marco TeoricoCuenta FakeОценок пока нет
- Clase 04Документ8 страницClase 04Lorena Edith Huayascachi GavilanОценок пока нет
- Taller de Robótica 2Документ6 страницTaller de Robótica 2KARLOSGZОценок пока нет
- Formato de Reporte de PrácticaДокумент6 страницFormato de Reporte de Prácticahector salasОценок пока нет
- Sistema de Tuberia CerradasДокумент15 страницSistema de Tuberia CerradasJhefferson Adrian Jiménez CuervoОценок пока нет
- Guía de Ejercicios - Transformaciones LinealesДокумент10 страницGuía de Ejercicios - Transformaciones LinealesKamiiIgnaciaОценок пока нет
- Algunos Ejercicios-Resultos-Robotica PDFДокумент12 страницAlgunos Ejercicios-Resultos-Robotica PDFDannielitosОценок пока нет
- Labo 1 TraccionДокумент13 страницLabo 1 TraccionMANUEL ALONSO QUISPE TICONAОценок пока нет
- Apunte Matrices 2021Документ31 страницаApunte Matrices 2021Jerónimo VidelaОценок пока нет
- Taller - Marcos - de - Referencia - Islas Rojo Cristian IsaacДокумент6 страницTaller - Marcos - de - Referencia - Islas Rojo Cristian Isaaccislas1802Оценок пока нет
- Avancelab 7Документ4 страницыAvancelab 7dfgdfghb bfghdthdhОценок пока нет
- Lab 1 RobóticaДокумент5 страницLab 1 RobóticaNeheyler MecatrónicoОценок пока нет
- Pregunta #01Документ7 страницPregunta #01ANGHELO DGОценок пока нет
- Trabajo Ok (Recuperado)Документ25 страницTrabajo Ok (Recuperado)Oscar Alberto GUTIERREZ ANCOОценок пока нет
- Practica T-H PDFДокумент6 страницPractica T-H PDFMundo JaimeОценок пока нет
- Prueba 3 Al (Pauta Sin Puntaje)Документ3 страницыPrueba 3 Al (Pauta Sin Puntaje)JulianОценок пока нет
- Parametros de D-HДокумент10 страницParametros de D-HJheral Ramírez NavarroОценок пока нет
- Informe 2Документ12 страницInforme 2Martín NarvaezОценок пока нет
- Tarea Academica N°4Документ14 страницTarea Academica N°4Joel Jonathan AlvarezОценок пока нет
- Trabajo de Transformacion Lineales TerminadoДокумент22 страницыTrabajo de Transformacion Lineales TerminadoFrancisco Javier ObandoОценок пока нет
- Ejercicios de Relaciones de Orden ParcialДокумент5 страницEjercicios de Relaciones de Orden ParcialrobertoОценок пока нет
- ScaraДокумент12 страницScaraEmmanuel Dorantes MalagonОценок пока нет
- Avance Proyecto LaboratorioДокумент11 страницAvance Proyecto LaboratorioErick DiazОценок пока нет
- C16 Ejercicios Redes de Petri - SolucionДокумент9 страницC16 Ejercicios Redes de Petri - SolucionEmanuel QuicenoОценок пока нет
- Solucionario PC 3 2021-IДокумент3 страницыSolucionario PC 3 2021-IGuillermo Villarroel HanccoОценок пока нет
- Biestable JK Apartir de Biestable DДокумент4 страницыBiestable JK Apartir de Biestable Dleonardo garcia morenoОценок пока нет
- 3.1.3. Operaciones Con Transformaciones Lineales, Composición de Transformaciones NuevoДокумент7 страниц3.1.3. Operaciones Con Transformaciones Lineales, Composición de Transformaciones NuevoEdward MedrandaОценок пока нет
- Analisis Cinematico e Inverso Del Robot PUMAДокумент25 страницAnalisis Cinematico e Inverso Del Robot PUMAraulОценок пока нет
- Parcial 2 ControlModernoДокумент7 страницParcial 2 ControlModernoChristopher BravoОценок пока нет
- Ejercicio 60 AlgebraДокумент4 страницыEjercicio 60 AlgebraVictor ZarabandaОценок пока нет
- Ejercisio 5 MODELOSДокумент7 страницEjercisio 5 MODELOSSelena CarrilloОценок пока нет
- 1pc TORRES LUISДокумент9 страниц1pc TORRES LUISLuis FernandoОценок пока нет
- RESUMENESTДокумент6 страницRESUMENESTJaviera Gonzalez DiazОценок пока нет
- Potencia Base 2Документ3 страницыPotencia Base 2Angelo BrañezОценок пока нет
- Lista de Materiales CorregidoДокумент20 страницLista de Materiales CorregidoAngelo BrañezОценок пока нет
- Presentacion Final de FundicionДокумент46 страницPresentacion Final de FundicionAngelo BrañezОценок пока нет
- Listado William 2015Документ1 417 страницListado William 2015Angelo BrañezОценок пока нет
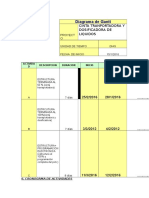
- Diagrama de GanttДокумент4 страницыDiagrama de GanttAngelo BrañezОценок пока нет
- Ejemplosmatrices de Transformacion Homogenea CompuestaДокумент17 страницEjemplosmatrices de Transformacion Homogenea CompuestaAngelo BrañezОценок пока нет
- Perfil de Proyecto 1Документ3 страницыPerfil de Proyecto 1Angelo BrañezОценок пока нет
- Programa PicДокумент11 страницPrograma PicAngelo BrañezОценок пока нет
- Trabajo MecaДокумент4 страницыTrabajo MecaAngelo BrañezОценок пока нет
- Cinta Tranportadora y Dosificadora de Liquidos FinalДокумент15 страницCinta Tranportadora y Dosificadora de Liquidos FinalAngelo BrañezОценок пока нет
- Husillo de BolasДокумент6 страницHusillo de BolasAngelo BrañezОценок пока нет
- Correas Dentadas o SíncronasДокумент9 страницCorreas Dentadas o SíncronasAngelo Brañez100% (1)
- Direct DriveДокумент4 страницыDirect DriveAngelo BrañezОценок пока нет
- Cinta Tranportadora y Dosificadora de Liquidos FinalДокумент15 страницCinta Tranportadora y Dosificadora de Liquidos FinalAngelo BrañezОценок пока нет
- Simulacion StreamlineДокумент192 страницыSimulacion StreamlinePedro Wilmar Guerrero Mahecha100% (1)
- Trabajo Metodologia Alfa de CronbachДокумент17 страницTrabajo Metodologia Alfa de CronbachyennysОценок пока нет
- Entrega 2 Estructuras de DatosДокумент4 страницыEntrega 2 Estructuras de DatosRonald CarvalОценок пока нет
- Pendulo Fisico 1Документ6 страницPendulo Fisico 1MATEO ANDRES MEJIA LEMUSОценок пока нет
- Ejercicios de Sumas y Restas para Primer Grado de PrimariaДокумент7 страницEjercicios de Sumas y Restas para Primer Grado de PrimariaÁNGEL DAVID BARRETO SIMANCAОценок пока нет
- Trabajo de Aplicacion EstadisticaДокумент26 страницTrabajo de Aplicacion EstadisticaLeonardo Pairazaman100% (1)
- Principio de ArquimidesДокумент24 страницыPrincipio de ArquimidesCristhian MatОценок пока нет
- 1.-Analisis Preliminar de RiesgosДокумент24 страницы1.-Analisis Preliminar de RiesgosGabriel Fernandez100% (1)
- Determinismo en La Física ClásicaДокумент22 страницыDeterminismo en La Física ClásicaEpifumiОценок пока нет
- Tarea S1Документ14 страницTarea S1Kyra Lizany López GutiérrezОценок пока нет
- Taller 1 Logica y Pensamiento MatematicoДокумент3 страницыTaller 1 Logica y Pensamiento MatematicoMARLION ALEXIS CALA VEGAОценок пока нет
- Grupo - 2 Paso 2Документ14 страницGrupo - 2 Paso 2Daniel Andres Garcia DelgadilloОценок пока нет
- Diseño Experimental Xi Copip Uni 2020 PDFДокумент47 страницDiseño Experimental Xi Copip Uni 2020 PDFtommyversaОценок пока нет
- PsicrometriaДокумент22 страницыPsicrometriaMilagros RemaycunaОценок пока нет
- Fuerzas Cortantes y Momentos FlexionantesДокумент7 страницFuerzas Cortantes y Momentos FlexionantesnelsonОценок пока нет
- Términos EstadísticosДокумент4 страницыTérminos EstadísticosYuriiko Carrizales HuancaОценок пока нет
- Actividad1 - Estadística para Las Ciencias SocialesДокумент10 страницActividad1 - Estadística para Las Ciencias SocialesHannia EstradaОценок пока нет
- SEMANA 14 Material Centro de Masas y ChoquesДокумент11 страницSEMANA 14 Material Centro de Masas y ChoquesRAMIRO VILCA PEÑAОценок пока нет
- Estadistica p4 PDFДокумент17 страницEstadistica p4 PDFDanny Marcelo Tomichá0% (1)
- Formato Guia Elaboracion Tesis UteДокумент19 страницFormato Guia Elaboracion Tesis UteLuchito Guaman100% (1)
- Velocidad DirectrizДокумент4 страницыVelocidad DirectrizValerita Silvana Ramirez50% (2)
- Taller 2Документ5 страницTaller 2Luis DanielОценок пока нет
- Energía Potencial Del Oscilador Armónico.Документ8 страницEnergía Potencial Del Oscilador Armónico.AaronBautistaCastañedaОценок пока нет
- Tarea 5 Resistencia de Los MaterialesДокумент10 страницTarea 5 Resistencia de Los MaterialesJosafat Benavides Núñez100% (2)
- Definición de Altura de Una Pirámide - Buscar ConДокумент1 страницаDefinición de Altura de Una Pirámide - Buscar ConAle AguilarОценок пока нет
- Hoja de Trabajo - Sesión 13 - B - 2019 - IДокумент10 страницHoja de Trabajo - Sesión 13 - B - 2019 - Ifrank ganz bravoОценок пока нет
- Sistemas Termicos e HidraulicosДокумент17 страницSistemas Termicos e HidraulicosDavid Nicolas Torres BarreraОценок пока нет
- Semana 1.1 Introduccion A La Investigacion Operativa PDFДокумент63 страницыSemana 1.1 Introduccion A La Investigacion Operativa PDFalejandroelmaxОценок пока нет
- Saber Ver La ArquitecturaДокумент9 страницSaber Ver La ArquitecturabssbsОценок пока нет
- Ejercicios de Estadisica 4 Eavaluacion PDFДокумент24 страницыEjercicios de Estadisica 4 Eavaluacion PDFwilbert pinedaОценок пока нет