Вам также может понравиться
- Gupta PaperДокумент6 страницGupta PaperRnSi 0506Оценок пока нет
- Tangential DriveДокумент5 страницTangential Drivecopkutusu2012Оценок пока нет
- Axial Position and Speed Vector Control of The Inset PermanentДокумент6 страницAxial Position and Speed Vector Control of The Inset PermanentLê Đức ThịnhОценок пока нет
- Universiti Teknikal Malaysia Melaka Fakulti Kejuruteraan Mekanikal BMCM 3743-Mechanical Vibration Tutorial 1Документ2 страницыUniversiti Teknikal Malaysia Melaka Fakulti Kejuruteraan Mekanikal BMCM 3743-Mechanical Vibration Tutorial 1Kevin TanОценок пока нет
- Adjustable Passive Magnetic Constant Force ActuatorДокумент5 страницAdjustable Passive Magnetic Constant Force ActuatormmcyoungОценок пока нет
- 08 2009 151 Wong 04 PDFДокумент9 страниц08 2009 151 Wong 04 PDFBharath ReddyОценок пока нет
- Axial Force Between A Thick Coil and A Cylindrical Permanent Magnet: Optimising The Geometry of An Electromagnetic ActuatorДокумент11 страницAxial Force Between A Thick Coil and A Cylindrical Permanent Magnet: Optimising The Geometry of An Electromagnetic ActuatorOscar GutierrezОценок пока нет
- V Bends Burstones PDFДокумент9 страницV Bends Burstones PDFmateo bravoОценок пока нет
- Electrostatic Comb Drive Levitation and Control MethodДокумент9 страницElectrostatic Comb Drive Levitation and Control MethodtaОценок пока нет
- Comb Drive ArtДокумент5 страницComb Drive ArtIonescu ViorelОценок пока нет
- Project-PhysicsДокумент15 страницProject-Physicskamalesh.g9aОценок пока нет
- Analysis of An Electromagnetic Railgun With Tapered Rails and Concave Armature Using 3-D FEMДокумент4 страницыAnalysis of An Electromagnetic Railgun With Tapered Rails and Concave Armature Using 3-D FEMSaravana Kumar M NОценок пока нет
- C21 ElectromagnetismДокумент12 страницC21 ElectromagnetismJeketera ShadreckОценок пока нет
- 1 Choosing Between Brush Brushless 1Документ12 страниц1 Choosing Between Brush Brushless 1Juan Eladio LorenzoОценок пока нет
- ch3 PDFДокумент67 страницch3 PDFSwing music academyОценок пока нет
- Design of Tuned Mass Dampers Incorporating Wire Rope Springs: Part I: Dynamic Representation of Wire Rope SpringsДокумент9 страницDesign of Tuned Mass Dampers Incorporating Wire Rope Springs: Part I: Dynamic Representation of Wire Rope SpringsCristina ValigiОценок пока нет
- PhysRevLett 130 138401Документ6 страницPhysRevLett 130 138401xwzhang.bphysОценок пока нет
- DC Analitic SystemДокумент6 страницDC Analitic SystemDobai SzilardОценок пока нет
- Electromagnetic InductionДокумент10 страницElectromagnetic Inductionrahul1nayan100% (1)
- Chapter I4Документ36 страницChapter I4Old Oromo music museumОценок пока нет
- Forces On Rail PDFДокумент12 страницForces On Rail PDFRbKahnОценок пока нет
- Chapter 3 Electrodynamic InstrumentsДокумент39 страницChapter 3 Electrodynamic InstrumentsAliaa TarekОценок пока нет
- Instability of The Continuously Transposed Cable Under Axial Short-Circuit Forces in TransformersДокумент6 страницInstability of The Continuously Transposed Cable Under Axial Short-Circuit Forces in TransformerswindaidenОценок пока нет
- Transient Stability Analysis of Synchronous Generator in Electrical NetworkДокумент5 страницTransient Stability Analysis of Synchronous Generator in Electrical NetworkSadil BatafОценок пока нет
- Wilberforce PendulumДокумент9 страницWilberforce PendulumLeo KutsОценок пока нет
- Year 12 E-Note PhyДокумент77 страницYear 12 E-Note Phyjeffersonawesome28Оценок пока нет
- Investigatory Project On Moving Coil Galvanometer: Submitted By: Name: Jayant Arora Class: XII-A Roll No.Документ14 страницInvestigatory Project On Moving Coil Galvanometer: Submitted By: Name: Jayant Arora Class: XII-A Roll No.Jayant Arora82% (72)
- E06 Magnetic Force v01Документ4 страницыE06 Magnetic Force v01Abdulla ZaabiОценок пока нет
- Computational Analysis of Aeolian Conductor Vibration With A Stockbridge-Type DamperДокумент21 страницаComputational Analysis of Aeolian Conductor Vibration With A Stockbridge-Type DamperhugopacoqОценок пока нет
- IJETR032565Документ3 страницыIJETR032565erpublicationОценок пока нет
- Chhabra PaperДокумент6 страницChhabra PaperNitesh DixitОценок пока нет
- Physics 1st YearДокумент64 страницыPhysics 1st YearManishОценок пока нет
- Measurements and Instrumentation VinethДокумент8 страницMeasurements and Instrumentation VinethVINETH .RОценок пока нет
- 03 Modeling of SDOF SystemsДокумент10 страниц03 Modeling of SDOF SystemsRoni AfrianОценок пока нет
- Electric Machines NPTELДокумент382 страницыElectric Machines NPTELDebajyoti DattaОценок пока нет
- Physics Manual 3Документ26 страницPhysics Manual 3rjayakumar jayaОценок пока нет
- FLC-MR Damper Control of Stay Cable Nonlinear Vibration: Skfali@civil - Iisc.ernet - inДокумент6 страницFLC-MR Damper Control of Stay Cable Nonlinear Vibration: Skfali@civil - Iisc.ernet - inShaikh Faruque AliОценок пока нет
- A Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionДокумент11 страницA Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionBeny AbdouОценок пока нет
- Tri-Axial Sensors and Actuators Made of A Single Piezoelectric Cylindrical ShellДокумент6 страницTri-Axial Sensors and Actuators Made of A Single Piezoelectric Cylindrical ShellAnubhav KumarОценок пока нет
- Prof. Ch. SAI BABU: TopicДокумент90 страницProf. Ch. SAI BABU: TopicAbhimanyu Perumal100% (3)
- Charts For Bending Moment Coefficients For Continuous Beams: August 2015Документ20 страницCharts For Bending Moment Coefficients For Continuous Beams: August 2015Anonymous YggO6T6GzОценок пока нет
- Module 10 Measuring InstrumentsДокумент19 страницModule 10 Measuring InstrumentsRavinder SharmaОценок пока нет
- Electrical Machinery GeneralizationДокумент9 страницElectrical Machinery Generalizationzen anastacioОценок пока нет
- Measurements and Instrumentation VinethДокумент8 страницMeasurements and Instrumentation VinethVINETH .RОценок пока нет
- Electromagnetic InductionДокумент13 страницElectromagnetic InductionHäbîîboo HäbĩĩbooОценок пока нет
- Class 12 Physics Project SampleДокумент13 страницClass 12 Physics Project SampleUma MaheshwariОценок пока нет
- Macalalag Lab 2Документ18 страницMacalalag Lab 2Jaloyd MacalalagОценок пока нет
- Design and Control of Novel Embedded Sma Actuators: Yang KAI, Gu ChenginДокумент8 страницDesign and Control of Novel Embedded Sma Actuators: Yang KAI, Gu ChenginPugalenddi VenkatesanОценок пока нет
- Full Operational Range Dynamic Modeling of Microcantilever BeamsДокумент9 страницFull Operational Range Dynamic Modeling of Microcantilever BeamsAnjireddy ThatiparthyОценок пока нет
- This Report Is Submitted To Fulfill The Requirements of The Engineering Power System 1 Semseter 2020Документ9 страницThis Report Is Submitted To Fulfill The Requirements of The Engineering Power System 1 Semseter 2020Yasser MohammedОценок пока нет
- Mathematical Modeling and Simulation of A Moored Buoy SystemДокумент7 страницMathematical Modeling and Simulation of A Moored Buoy SystemSoledad AceitunoОценок пока нет
- DC Generator and MotorДокумент7 страницDC Generator and MotoranilkulalОценок пока нет
- Magnetic Circuits, Energy Conversion and Three Phase TheoryДокумент88 страницMagnetic Circuits, Energy Conversion and Three Phase Theoryn02219827hОценок пока нет
- Lecture 2 Notes InstruДокумент33 страницыLecture 2 Notes InstruSolomon KenОценок пока нет
- TorsionДокумент8 страницTorsionZewdieОценок пока нет
- PMMC & EdmДокумент31 страницаPMMC & EdmREHMAN MALIK100% (1)
- Impt QuestionsCurrent ElectricityДокумент3 страницыImpt QuestionsCurrent ElectricityAsher MuhammedОценок пока нет
- Deformation of Adhering Elastic Tubes: T E P J EДокумент5 страницDeformation of Adhering Elastic Tubes: T E P J ECuong NguyenОценок пока нет
- Redacted For PrivacyДокумент38 страницRedacted For PrivacyLowayОценок пока нет
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresОт EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresРейтинг: 4 из 5 звезд4/5 (1)
- IJETR033082Документ4 страницыIJETR033082erpublicationОценок пока нет
- IJETR033013Документ8 страницIJETR033013erpublicationОценок пока нет
- IJETR033043Документ6 страницIJETR033043erpublicationОценок пока нет
- IJETR033060Документ6 страницIJETR033060erpublicationОценок пока нет
- IJETR033069Документ6 страницIJETR033069erpublicationОценок пока нет
- IJETR033040Документ3 страницыIJETR033040erpublicationОценок пока нет
- IJETR033049Документ5 страницIJETR033049erpublicationОценок пока нет
- IJETR033063Документ3 страницыIJETR033063erpublicationОценок пока нет
- IJETR033079Документ4 страницыIJETR033079erpublicationОценок пока нет
- IJETR033053Документ4 страницыIJETR033053erpublicationОценок пока нет
- IJETR033055Документ9 страницIJETR033055erpublicationОценок пока нет
- IJETR033011Документ3 страницыIJETR033011erpublicationОценок пока нет
- IJETR033077Документ6 страницIJETR033077erpublicationОценок пока нет
- IJETR033062Документ2 страницыIJETR033062erpublicationОценок пока нет
- IJETR033033Документ4 страницыIJETR033033erpublicationОценок пока нет
- IJETR033050Документ6 страницIJETR033050erpublicationОценок пока нет
- Matlab and Simulink Based Simulation of Wideband Code Division Multiple Access (WCDMA)Документ6 страницMatlab and Simulink Based Simulation of Wideband Code Division Multiple Access (WCDMA)erpublicationОценок пока нет
- IJETR033035Документ5 страницIJETR033035erpublicationОценок пока нет
- IJETR033047Документ4 страницыIJETR033047erpublicationОценок пока нет
- IJETR032923Документ5 страницIJETR032923erpublicationОценок пока нет
- IJETR033012Документ7 страницIJETR033012erpublicationОценок пока нет
- Recognition of Heterogeneous Faces Using Kernel Principal Component AnalysisДокумент4 страницыRecognition of Heterogeneous Faces Using Kernel Principal Component AnalysiserpublicationОценок пока нет
- IJETR032922Документ6 страницIJETR032922erpublicationОценок пока нет
- IJETR033051Документ2 страницыIJETR033051erpublicationОценок пока нет
- Thermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuДокумент3 страницыThermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuerpublicationОценок пока нет
- The Effect of Focus On Spectral Emphasis For Disyllabic Words in ChineseДокумент4 страницыThe Effect of Focus On Spectral Emphasis For Disyllabic Words in ChineseerpublicationОценок пока нет
- Charts For Cofficents of Moments For Continous BeamsДокумент19 страницCharts For Cofficents of Moments For Continous Beamsfat470Оценок пока нет
- ADRC Speed Control of IPMSM With Current Regulator: Wen Jianping, Zhang XuhuiДокумент3 страницыADRC Speed Control of IPMSM With Current Regulator: Wen Jianping, Zhang XuhuierpublicationОценок пока нет
- IJETR032909Документ11 страницIJETR032909erpublicationОценок пока нет
- IJETR032918Документ12 страницIJETR032918erpublicationОценок пока нет
- MY Pajero Sport VGT Service Plan & PriceДокумент1 страницаMY Pajero Sport VGT Service Plan & PriceNugroho FamОценок пока нет
- Compound CylinderДокумент11 страницCompound CylinderLiliana Ara GubanОценок пока нет
- 02 PDFДокумент39 страниц02 PDFShishir Kumar NayakОценок пока нет
- Martillo Hyd Atlas Copco SB 150Документ12 страницMartillo Hyd Atlas Copco SB 150Nain murilloОценок пока нет
- Mapex AN0320SN PDFДокумент1 страницаMapex AN0320SN PDFDiegoTierradentroОценок пока нет
- Alfa Laval Separartor s937 Alarms & Fault FindingsДокумент19 страницAlfa Laval Separartor s937 Alarms & Fault FindingsIgors VrublevskisОценок пока нет
- Problem Sheet 3 Heat, Work and The First Law of Thermodynamics PDFДокумент4 страницыProblem Sheet 3 Heat, Work and The First Law of Thermodynamics PDFS DОценок пока нет
- Material Testing LaboratoryДокумент13 страницMaterial Testing Laboratorydantan187100% (1)
- Zanotti DFZДокумент44 страницыZanotti DFZHubert Von Süßer BusartzОценок пока нет
- FPB 22.04 - Steam Turbines Maintenance Guidelines For Non Return Valve of Extraction LinesДокумент9 страницFPB 22.04 - Steam Turbines Maintenance Guidelines For Non Return Valve of Extraction Lineswaqar ahmadОценок пока нет
- Ta300 T4 0pli 11001Документ374 страницыTa300 T4 0pli 11001Ravinder Singh100% (3)
- AG 200-800 Series PilotsДокумент13 страницAG 200-800 Series Pilotstxlucky80Оценок пока нет
- Finite Element Analysis of Cylinder Piston Impact Based On ANSYS/LS-DYNAДокумент4 страницыFinite Element Analysis of Cylinder Piston Impact Based On ANSYS/LS-DYNAvenalum90Оценок пока нет
- CH 5 Kerja Dan EnergiДокумент21 страницаCH 5 Kerja Dan EnergiDey TandirerungОценок пока нет
- Válvula de Seguridad Anderson Greenwood Crosby - La Rosita - Jos-EДокумент66 страницVálvula de Seguridad Anderson Greenwood Crosby - La Rosita - Jos-EJose Flores100% (2)
- K-Max: Industrial RangeДокумент16 страницK-Max: Industrial RangeAMIR100% (1)
- Dynamics FULL Equation SheetДокумент2 страницыDynamics FULL Equation SheetZachОценок пока нет
- Performance Task in General Physics 1Документ3 страницыPerformance Task in General Physics 1Erica JoyОценок пока нет
- Helical Gears ProblemsДокумент29 страницHelical Gears Problemsa17e100% (1)
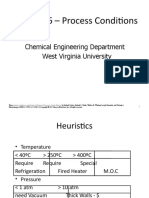
- Chapter 06 - Understanding Process ConditionsДокумент20 страницChapter 06 - Understanding Process ConditionsMohammed DaghurОценок пока нет
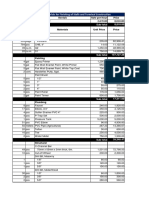
- 3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionДокумент2 страницы3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionKris Aileen CortezОценок пока нет
- BPT 13 Balanced Pressure Thermostatic Steam TrapДокумент2 страницыBPT 13 Balanced Pressure Thermostatic Steam Trapmember1000Оценок пока нет
- V-King CoreXY - Component Order ListДокумент1 страницаV-King CoreXY - Component Order Listfrankieb99Оценок пока нет
- EE402 Special Electrical MachinesДокумент2 страницыEE402 Special Electrical MachinesAsok Rawat0% (1)
- Hydro Power PlantsДокумент7 страницHydro Power PlantsKyambadde FranciscoОценок пока нет
- Böhler Fox CM 5 KB: Classifi CationsДокумент1 страницаBöhler Fox CM 5 KB: Classifi CationsBranko FerenčakОценок пока нет
- Cdo CalcДокумент3 страницыCdo CalcJeric FarinОценок пока нет
- SB 1803 R2 Operating TBO & HSI FrequencyДокумент22 страницыSB 1803 R2 Operating TBO & HSI FrequencyDade Sobarna100% (4)
- FGM Piston Liner Kit IndexДокумент88 страницFGM Piston Liner Kit IndexLuis Arturo Arevalo LeonОценок пока нет
- Tubo Sin CosturaДокумент4 страницыTubo Sin CosturaJl KaneОценок пока нет