Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Design Formula For EC2 Version 06 PDFДокумент35 страницDesign Formula For EC2 Version 06 PDFscegts100% (1)
- Panel 1Документ360 страницPanel 1Marko ŠimićОценок пока нет
- CorbelДокумент30 страницCorbelMarko ŠimićОценок пока нет
- 4Документ18 страниц4ihpeterОценок пока нет
- UuuДокумент11 страницUuuMarko ŠimićОценок пока нет
- 10 Wit-Vm 250 RДокумент24 страницы10 Wit-Vm 250 RMarko ŠimićОценок пока нет
- Ss Designprestressedconcrete enДокумент8 страницSs Designprestressedconcrete enMarko ŠimićОценок пока нет
- Analysis Notes Sap Curve For CrackДокумент19 страницAnalysis Notes Sap Curve For CrackDemçe FlorjanОценок пока нет
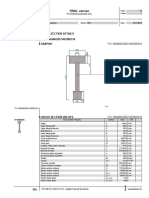
- Cross-Section Details ITU 1600/600/265/140/300/310 Graphic: TRIAL VersionДокумент2 страницыCross-Section Details ITU 1600/600/265/140/300/310 Graphic: TRIAL VersionMarko ŠimićОценок пока нет
- Concrete TheoryДокумент69 страницConcrete TheoryMarko ŠimićОценок пока нет
- Templates and Reports - 0Документ42 страницыTemplates and Reports - 0Six RameshОценок пока нет
- RCC81 Foundation PadsДокумент1 страницаRCC81 Foundation PadsMarko ŠimićОценок пока нет
- 01we Bond Worked Example Combinations of ActionsДокумент0 страниц01we Bond Worked Example Combinations of ActionsPacoОценок пока нет
- Concrete Manual enДокумент179 страницConcrete Manual enMarko ŠimićОценок пока нет
- Analysis Notes 1Документ19 страницAnalysis Notes 1Marko ŠimićОценок пока нет
- Rfem 5 Manual enДокумент588 страницRfem 5 Manual enMarko ŠimićОценок пока нет
- Foundation ProДокумент111 страницFoundation ProcteranscribdОценок пока нет
- Ase 1Документ369 страницAse 1Marko ŠimićОценок пока нет
- Readme PDFДокумент1 страницаReadme PDFMarko ŠimićОценок пока нет
- RF Concrete Members Manual enДокумент116 страницRF Concrete Members Manual enMarko ŠimićОценок пока нет
- Rf-Tendon eДокумент89 страницRf-Tendon eJoaquin Galeano AlvarezОценок пока нет
- RF Deform Manual enДокумент19 страницRF Deform Manual enMarko ŠimićОценок пока нет
- Nonlinear Analysis of Concrete StructuresДокумент28 страницNonlinear Analysis of Concrete StructuresMarko ŠimićОценок пока нет
- JL 82 September October 5Документ16 страницJL 82 September October 5Marko ŠimićОценок пока нет
- 14184Документ7 страниц14184Marko ŠimićОценок пока нет
- Analisis Metodo Directo Aisc EtabsДокумент12 страницAnalisis Metodo Directo Aisc EtabsMichael TorresОценок пока нет
- Element: T 70 Poprecna Greda L 11.45 M: Kneza Miloša 19/III Tel: 011 3348529 064 2589275Документ6 страницElement: T 70 Poprecna Greda L 11.45 M: Kneza Miloša 19/III Tel: 011 3348529 064 2589275Marko ŠimićОценок пока нет
- Table: Case - Static 1 - Load Assignments Case Loadtype Loadname LoadsfДокумент9 страницTable: Case - Static 1 - Load Assignments Case Loadtype Loadname LoadsfMarko ŠimićОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Topdek PIR Installation Guide A5 Sept 2020Документ12 страницTopdek PIR Installation Guide A5 Sept 2020fahim007Оценок пока нет
- Reason Not To Refill The Old Expired Fire Extinguisher 1Документ3 страницыReason Not To Refill The Old Expired Fire Extinguisher 1swapnilmanwtkarОценок пока нет
- Lab Report 4 Colligative PropertiesДокумент9 страницLab Report 4 Colligative Propertiesapi-436054247Оценок пока нет
- On Wire IndustryДокумент47 страницOn Wire IndustryAjit SharmaОценок пока нет
- Tpi 28 - Pkir - Pkis - en - 201411Документ24 страницыTpi 28 - Pkir - Pkis - en - 201411KundzoОценок пока нет
- Boys Book of Steam EnginesДокумент282 страницыBoys Book of Steam Enginesmardukzek100% (6)
- 6 Big Losses in Manufacturing-2Документ3 страницы6 Big Losses in Manufacturing-2izzudinrozОценок пока нет
- Kaup T411 T411D ENДокумент8 страницKaup T411 T411D ENJuan Francisco Canto DiezОценок пока нет
- Shaper Planer and SlotterДокумент21 страницаShaper Planer and SlotterBharathiraja MoorthyОценок пока нет
- Fluid Mechanic SKAA 1513 SAB 1513Документ9 страницFluid Mechanic SKAA 1513 SAB 1513Amirul AizatОценок пока нет
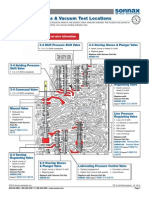
- 722 6 VacTestLocationsДокумент4 страницы722 6 VacTestLocationsUrszula WalczewskaОценок пока нет
- Injection System VMUplusДокумент15 страницInjection System VMUplusmohamed rafiОценок пока нет
- ROB StaircaseДокумент21 страницаROB StaircaseSambhav PoddarОценок пока нет
- Aspen Exchanger Design and Rating Shell & Tube V10Документ1 страницаAspen Exchanger Design and Rating Shell & Tube V10MAYANK AGRAWALОценок пока нет
- Lecture 21 PDFДокумент14 страницLecture 21 PDFMehmet Arvasi100% (1)
- Composites Knowledge Competition AnswersДокумент13 страницComposites Knowledge Competition AnswersAhmed Akram AlkhashabОценок пока нет
- AISC ASTM A325 OR A490 BoltsДокумент7 страницAISC ASTM A325 OR A490 BoltsJonatan López Carriel100% (1)
- Transmission T-7336 PsДокумент186 страницTransmission T-7336 PsAhmed Dessie Mohammed100% (6)
- Appleton Sellos VerticalesДокумент2 страницыAppleton Sellos VerticalesArq. Giovanni LopezОценок пока нет
- SSPC Paint 20Документ6 страницSSPC Paint 20Juan Carlos Contreras CherresОценок пока нет
- 2.separator ManualДокумент198 страниц2.separator Manualidigiti100% (1)
- Using Waste Plastic Bottles As AdditiveДокумент6 страницUsing Waste Plastic Bottles As AdditiveGyanna LlenaresasОценок пока нет
- Mud Lab Manual - NewДокумент32 страницыMud Lab Manual - Newfisco4ril67% (6)
- MatWeb - The Online Materials Information ResourceДокумент3 страницыMatWeb - The Online Materials Information ResourceVignesh AnbazhaganОценок пока нет
- Superwool Plus BlanketДокумент2 страницыSuperwool Plus Blanketdnageshm4n244Оценок пока нет
- Two Way Slab Design With VBAДокумент6 страницTwo Way Slab Design With VBAprabin gautamОценок пока нет
- SP 90 00Документ78 страницSP 90 00aminОценок пока нет
- MSMBM Oct 2022 - 2Документ2 страницыMSMBM Oct 2022 - 2battuarunОценок пока нет
- Aluminium Alloy 6061Документ3 страницыAluminium Alloy 6061choobyОценок пока нет
- Vice President Operations in Somerville NJ Resume Vasu MohanДокумент3 страницыVice President Operations in Somerville NJ Resume Vasu MohanVasumohanОценок пока нет