Вам также может понравиться
- 6 CsabaFARKAS PDFДокумент7 страниц6 CsabaFARKAS PDFLương Ngọc ToànОценок пока нет
- PE351 Lect4 2020Документ31 страницаPE351 Lect4 2020Abdul RazzaqОценок пока нет
- Chapter 2 CAPS PDFДокумент21 страницаChapter 2 CAPS PDFZedo ZedoОценок пока нет
- G. Anderson G. Liss 1991 Improving Voltage Stability in Power Systems With HVDCДокумент6 страницG. Anderson G. Liss 1991 Improving Voltage Stability in Power Systems With HVDCFelix GamarraОценок пока нет
- A Novel Load Sharing Control Technique For Paralleled InvertersДокумент6 страницA Novel Load Sharing Control Technique For Paralleled InvertersMohamed BerririОценок пока нет
- Power Conditioning System For Grid-Connected Photovoltaic SystemДокумент7 страницPower Conditioning System For Grid-Connected Photovoltaic SystempksahunitrklОценок пока нет
- Electrical Engineering Volume 64 Issue 6 1945 (Doi 10.1109/EE.1945.6441080) Clarke, Edith - Impedances Seen by Relays During Power Swings With and Without FaultsДокумент13 страницElectrical Engineering Volume 64 Issue 6 1945 (Doi 10.1109/EE.1945.6441080) Clarke, Edith - Impedances Seen by Relays During Power Swings With and Without FaultsAnonymous m65TTcfOTОценок пока нет
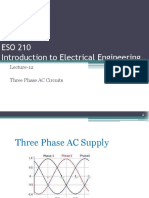
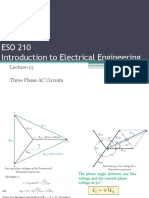
- ESO 210 Introduction To Electrical Engineering: Lecture-12 Three Phase AC CircuitsДокумент45 страницESO 210 Introduction To Electrical Engineering: Lecture-12 Three Phase AC CircuitsAmit MondalОценок пока нет
- 5Документ68 страниц5Uday ShankarОценок пока нет
- Final DVSA2 Merged OrganizedДокумент16 страницFinal DVSA2 Merged Organizedkakkunuru kashyapОценок пока нет
- NGR PDFДокумент21 страницаNGR PDFDibyenduОценок пока нет
- Load Flow AnalysisДокумент122 страницыLoad Flow AnalysisPiyush PradhanОценок пока нет
- ESO 210 Introduction To Electrical Engineering: Lecture-13 Three Phase AC CircuitsДокумент34 страницыESO 210 Introduction To Electrical Engineering: Lecture-13 Three Phase AC CircuitsAmit MondalОценок пока нет
- Power-Flow StudiesДокумент28 страницPower-Flow StudiesMd.Arifur RahmanОценок пока нет
- Tsaadiquu PDFДокумент31 страницаTsaadiquu PDFtadepeace23Оценок пока нет
- ADMAPN065ENДокумент8 страницADMAPN065ENasdthuОценок пока нет
- Electrical Fault Calculation - Positive Negative Zero Sequence ImpedanceДокумент8 страницElectrical Fault Calculation - Positive Negative Zero Sequence ImpedanceMehrdad Nirui100% (1)
- Hybrid Feedbacks For Power Amplifiers (Acrosound Ultra-Linear II) - Herbert I. Keroes (Audio, Sep 1958)Документ6 страницHybrid Feedbacks For Power Amplifiers (Acrosound Ultra-Linear II) - Herbert I. Keroes (Audio, Sep 1958)jimmy67musicОценок пока нет
- POWER SYSTEM NUTRAL GRND FundamentalДокумент21 страницаPOWER SYSTEM NUTRAL GRND FundamentalAbhay ShrivastavОценок пока нет
- Psoc Unit 3Документ17 страницPsoc Unit 3kondurumahi50Оценок пока нет
- Get in Step With SynchronizationДокумент7 страницGet in Step With SynchronizationCarlynMОценок пока нет
- A Static Synchronous Compensator For Displacement Power Factor Correction Under Distorted Mains Voltage ConditionsДокумент6 страницA Static Synchronous Compensator For Displacement Power Factor Correction Under Distorted Mains Voltage ConditionsDéjàvu ChongОценок пока нет
- Control of Systems : Electric PowerДокумент13 страницControl of Systems : Electric PowerEric HernandezОценок пока нет
- Per Unit SystemДокумент5 страницPer Unit SystemJeremy DeleonОценок пока нет
- EE423 Fault Analysis NotesДокумент26 страницEE423 Fault Analysis NotesadnanОценок пока нет
- EE-401 - Power Flow Analysis - PPTДокумент80 страницEE-401 - Power Flow Analysis - PPTpushpak chandra sekharОценок пока нет
- 02 Parallel Operation PDFДокумент16 страниц02 Parallel Operation PDFKazi Newaj FaisalОценок пока нет
- Representation of Power System ComponentsДокумент14 страницRepresentation of Power System ComponentsRume EmujekarohwoОценок пока нет
- Load Flow AnalysisДокумент3 страницыLoad Flow Analysisaral.muna.bago.harotОценок пока нет
- Fenomeno Ferrorisonanza (Eng)Документ29 страницFenomeno Ferrorisonanza (Eng)AlbertoОценок пока нет
- Lecture 1 Load Flow StudiesДокумент34 страницыLecture 1 Load Flow StudiesYemsrach sisayОценок пока нет
- FACTs Controllers NotesДокумент17 страницFACTs Controllers NotesrajashekarmandiОценок пока нет
- Approach To Unbalance Power Active Compensation Under Linear Load Unbalances and Fundamental Voltage AsymmetriesДокумент14 страницApproach To Unbalance Power Active Compensation Under Linear Load Unbalances and Fundamental Voltage AsymmetriesTarak BenslimaneОценок пока нет
- Analysis of Power System II-Lec01Документ26 страницAnalysis of Power System II-Lec01سعدالدين مالك الرفاعي عبدالرحمن100% (1)
- Injection of Photovoltaic Arrays Power and Power Quality Improvement by Universal Power Quality Conditioning SystemДокумент12 страницInjection of Photovoltaic Arrays Power and Power Quality Improvement by Universal Power Quality Conditioning Systemtariq76Оценок пока нет
- Phase Shifting TransformersДокумент6 страницPhase Shifting TransformersWaldemar ZiomekОценок пока нет
- Simulation of A Wireless Power Transfer System For Electric Vehicles With Power Factor CorrectionДокумент6 страницSimulation of A Wireless Power Transfer System For Electric Vehicles With Power Factor Correctionwalidghoneim1970Оценок пока нет
- Power System Analysis 2 MarksДокумент35 страницPower System Analysis 2 MarksSyama ShankarОценок пока нет
- Electrical Fault Calculation Positive Negative Zero Sequence ImpedanceДокумент7 страницElectrical Fault Calculation Positive Negative Zero Sequence ImpedanceGourav KumarОценок пока нет
- IA08700001EДокумент11 страницIA08700001EbansalrОценок пока нет
- Power System AnalysisДокумент40 страницPower System AnalysisAkhtarОценок пока нет
- Influence of Automatic Control of A Tap ChangingДокумент8 страницInfluence of Automatic Control of A Tap ChangingRaphael NgenyiОценок пока нет
- Loss of Field Protection For GeneratorsДокумент18 страницLoss of Field Protection For GeneratorsDBachai84Оценок пока нет
- Chapter TwoДокумент23 страницыChapter TwoMagarsaa Qana'iiОценок пока нет
- Load Flow StudiesДокумент30 страницLoad Flow StudiesMary Morse100% (2)
- Assignment 12 AnswersДокумент12 страницAssignment 12 AnswersNanda KumarОценок пока нет
- Harmonics TechniquesДокумент5 страницHarmonics Techniqueslvndr_snghОценок пока нет
- AC Lines SVS CompensationДокумент8 страницAC Lines SVS CompensationSagar ThakerОценок пока нет
- Review Paper On Optimal Capacitor PlacemДокумент4 страницыReview Paper On Optimal Capacitor PlacemArnold SОценок пока нет
- Facts - Chadlwada MaterialДокумент43 страницыFacts - Chadlwada Materialbaba nagaruruОценок пока нет
- Assignment by Sampurnanand MishraДокумент15 страницAssignment by Sampurnanand MishraSaroj SharmaОценок пока нет
- Power System Analysis SystemДокумент35 страницPower System Analysis SystemRaja Antony Mohammed100% (5)
- Lecture Part 1Документ9 страницLecture Part 1fkb7hdvbznОценок пока нет
- Power System Transient Stability Analysis Using EtAPДокумент6 страницPower System Transient Stability Analysis Using EtAPsamirparida81100% (1)
- Ystem Nalogies: Across Variables (V, T, and P)Документ7 страницYstem Nalogies: Across Variables (V, T, and P)Bryle CoОценок пока нет
- Energy Conversion II: Prof. S. Shahnawaz AhmedДокумент14 страницEnergy Conversion II: Prof. S. Shahnawaz Ahmedmahamudul hasanОценок пока нет
- 8 Baringo2017Документ11 страниц8 Baringo2017mauricioayoОценок пока нет
- Transmission and Wind Investment in A Deregulated Electricity IndustryДокумент12 страницTransmission and Wind Investment in A Deregulated Electricity IndustrymauricioayoОценок пока нет
- Energy Strategy Reviews: Isaac-Camilo Gonzalez-Romero, Sonja Wogrin, Tomas Gomez TДокумент12 страницEnergy Strategy Reviews: Isaac-Camilo Gonzalez-Romero, Sonja Wogrin, Tomas Gomez TmauricioayoОценок пока нет
- An Adaptive Robust Optimization Model For Power Systems Planning With Operational UncertaintyДокумент11 страницAn Adaptive Robust Optimization Model For Power Systems Planning With Operational UncertaintymauricioayoОценок пока нет
- S4 - 1 Juan RosellonДокумент41 страницаS4 - 1 Juan RosellonmauricioayoОценок пока нет
- Lesson 9 Et332bДокумент11 страницLesson 9 Et332bmauricioayoОценок пока нет
- Building Services Planning Manual-2007Документ122 страницыBuilding Services Planning Manual-2007razanmrm90% (10)
- Physics Education Thesis TopicsДокумент4 страницыPhysics Education Thesis TopicsPaperWriterServicesCanada100% (2)
- Configuring BGP On Cisco Routers Lab Guide 3.2Документ106 страницConfiguring BGP On Cisco Routers Lab Guide 3.2skuzurov67% (3)
- Assignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Документ2 страницыAssignment of Chemistry For B.sc-B.ed First Semester Session 2019-2023-1Payal sahaОценок пока нет
- PFEIFER Angled Loops For Hollow Core Slabs: Item-No. 05.023Документ1 страницаPFEIFER Angled Loops For Hollow Core Slabs: Item-No. 05.023adyhugoОценок пока нет
- Pidsdps 2106Документ174 страницыPidsdps 2106Steven Claude TanangunanОценок пока нет
- English Homework 10 Grammar Focus 2: Lecturer: Mr. Dr. H. Abdul Hamid, M.SiДокумент4 страницыEnglish Homework 10 Grammar Focus 2: Lecturer: Mr. Dr. H. Abdul Hamid, M.SiMutiara siwa UtamiОценок пока нет
- Skills Checklist - Gastrostomy Tube FeedingДокумент2 страницыSkills Checklist - Gastrostomy Tube Feedingpunam todkar100% (1)
- Hidrl1 PDFДокумент7 страницHidrl1 PDFRajesh Kumar100% (1)
- Applications SeawaterДокумент23 страницыApplications SeawaterQatar home RentОценок пока нет
- Phytotherapy On CancerДокумент21 страницаPhytotherapy On CancerSiddhendu Bhattacharjee100% (1)
- Kyle Pape - Between Queer Theory and Native Studies, A Potential For CollaborationДокумент16 страницKyle Pape - Between Queer Theory and Native Studies, A Potential For CollaborationRafael Alarcón Vidal100% (1)
- Review On AlgebraДокумент29 страницReview On AlgebraGraziela GutierrezОценок пока нет
- Deep Hole Drilling Tools: BotekДокумент32 страницыDeep Hole Drilling Tools: BotekDANIEL MANRIQUEZ FAVILAОценок пока нет
- Technology Based Project: Special Track 1)Документ14 страницTechnology Based Project: Special Track 1)Kim ChiquilloОценок пока нет
- Presentation About GyroscopesДокумент24 страницыPresentation About GyroscopesgeenjunkmailОценок пока нет
- postedcontentadminuploadsFAQs20for20Organization PDFДокумент10 страницpostedcontentadminuploadsFAQs20for20Organization PDFMohd Adil AliОценок пока нет
- Sources of Hindu LawДокумент9 страницSources of Hindu LawKrishnaKousikiОценок пока нет
- Resume: Mr. Shubham Mohan Deokar E-MailДокумент2 страницыResume: Mr. Shubham Mohan Deokar E-MailAdv Ranjit Shedge PatilОценок пока нет
- Heimbach - Keeping Formingfabrics CleanДокумент4 страницыHeimbach - Keeping Formingfabrics CleanTunç TürkОценок пока нет
- Sakui, K., & Cowie, N. (2012) - The Dark Side of Motivation - Teachers' Perspectives On 'Unmotivation'. ELTJ, 66 (2), 205-213.Документ9 страницSakui, K., & Cowie, N. (2012) - The Dark Side of Motivation - Teachers' Perspectives On 'Unmotivation'. ELTJ, 66 (2), 205-213.Robert HutchinsonОценок пока нет
- 7TH Maths F.a-1Документ1 страница7TH Maths F.a-1Marrivada SuryanarayanaОценок пока нет
- MultiLoadII Mobile Quick Start PDFДокумент10 страницMultiLoadII Mobile Quick Start PDFAndrés ColmenaresОценок пока нет
- Bullshit System v0.5Документ40 страницBullshit System v0.5ZolaniusОценок пока нет
- SachinДокумент3 страницыSachinMahendraОценок пока нет
- Aluminum PorterДокумент2 страницыAluminum PorterAmir ShameemОценок пока нет
- Buried PipelinesДокумент93 страницыBuried PipelinesVasant Kumar VarmaОценок пока нет
- Tesco True Results Casing Running in China Results in Total Depth PDFДокумент2 страницыTesco True Results Casing Running in China Results in Total Depth PDF123456ccОценок пока нет
- Rifle May 2015 USAДокумент72 страницыRifle May 2015 USAhanshcОценок пока нет
- Acute Appendicitis in Children - Diagnostic Imaging - UpToDateДокумент28 страницAcute Appendicitis in Children - Diagnostic Imaging - UpToDateHafiz Hari NugrahaОценок пока нет
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersОт Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersРейтинг: 5 из 5 звезд5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosОт EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosРейтинг: 5 из 5 звезд5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4.5 из 5 звезд4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tОт EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tРейтинг: 4.5 из 5 звезд4.5/5 (27)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonОт EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonРейтинг: 5 из 5 звезд5/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesОт EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesРейтинг: 5 из 5 звезд5/5 (1)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...От EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Оценок пока нет
- Teach Yourself Electricity and Electronics, 6th EditionОт EverandTeach Yourself Electricity and Electronics, 6th EditionРейтинг: 3.5 из 5 звезд3.5/5 (15)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsОт EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsОценок пока нет
- Analog Design and Simulation Using OrCAD Capture and PSpiceОт EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceОценок пока нет
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeОт EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialОт EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsОт EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsОт EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovОценок пока нет
- A Mind at Play: How Claude Shannon Invented the Information AgeОт EverandA Mind at Play: How Claude Shannon Invented the Information AgeРейтинг: 4 из 5 звезд4/5 (53)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldОт EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldРейтинг: 4 из 5 звезд4/5 (87)