Вам также может понравиться
- Posc FinalДокумент12 страницPosc Finalmksamy2021Оценок пока нет
- Small Signal Stability of 1 - Machine Infinite BusДокумент22 страницыSmall Signal Stability of 1 - Machine Infinite Buspaulrishav93Оценок пока нет
- EE1004 Power System Transients - GiradoДокумент42 страницыEE1004 Power System Transients - GiradoJavier RiveraОценок пока нет
- Assignment WindДокумент3 страницыAssignment WindShameer Majeed. AОценок пока нет
- EENG 415 Power System Reliability Analytical Methods: Lecture # 5Документ51 страницаEENG 415 Power System Reliability Analytical Methods: Lecture # 5k xcd9Оценок пока нет
- Power System Security: Viren B. PandyaДокумент23 страницыPower System Security: Viren B. PandyavirenpandyaОценок пока нет
- Shunt CompensatorsДокумент9 страницShunt CompensatorsAR-T100% (3)
- Avoiding Risk of Voltage Instability in A Power System Through Reactive Power Rescheduling and Load SheddingДокумент30 страницAvoiding Risk of Voltage Instability in A Power System Through Reactive Power Rescheduling and Load SheddingManish Kumar sharmaОценок пока нет
- Power System TransientsДокумент11 страницPower System TransientsKhairul AshrafОценок пока нет
- Impact of Shunt Capacitor Banks On Substation Surge Environment and Surge Arrester ApplicationДокумент12 страницImpact of Shunt Capacitor Banks On Substation Surge Environment and Surge Arrester ApplicationAndresZotticoОценок пока нет
- EENG415 Power System Reliability Probability Theory: Lecture # 2Документ78 страницEENG415 Power System Reliability Probability Theory: Lecture # 2k xcd9Оценок пока нет
- Lab2 1LineDiagram PDFДокумент16 страницLab2 1LineDiagram PDFMOSIUR RAHMANОценок пока нет
- Optimal Power Flow Simulation in Deregulated EnvironmentДокумент13 страницOptimal Power Flow Simulation in Deregulated EnvironmentGuru MishraОценок пока нет
- 3311 KV Substation Diesel ShedДокумент30 страниц3311 KV Substation Diesel ShedAshutoshSharmaОценок пока нет
- 4 Power Quality MonitoringДокумент21 страница4 Power Quality Monitoringhabte gebreial shrashrОценок пока нет
- Reliability of Distributed SystemДокумент14 страницReliability of Distributed SystemYogesh MishraОценок пока нет
- IEEE Power System Paper-Overview of STATCOM TechnologiesДокумент6 страницIEEE Power System Paper-Overview of STATCOM TechnologiesAnoop MathewОценок пока нет
- Optimal Power Flow Sensitivity CalculationДокумент8 страницOptimal Power Flow Sensitivity CalculationEléctrico IngenieríaОценок пока нет
- Power System Operation and ControlДокумент9 страницPower System Operation and ControlranjithrawalОценок пока нет
- Power System Planning and ReliabilityДокумент58 страницPower System Planning and ReliabilityGYANA RANJANОценок пока нет
- Surge Phenomena and Insulation CoordinationДокумент2 страницыSurge Phenomena and Insulation Coordinationprakash_yeee100% (1)
- Power FlowДокумент30 страницPower FlowDresta Ari ArkanОценок пока нет
- Module 1, PSPRДокумент11 страницModule 1, PSPRGYANA RANJANОценок пока нет
- Static Var Compensators: by Prof. C. RadhakrishnaДокумент30 страницStatic Var Compensators: by Prof. C. RadhakrishnaathbeljoeОценок пока нет
- All Test Bus SystemsДокумент37 страницAll Test Bus SystemsMiguel Acb100% (2)
- Interconnected SystemДокумент17 страницInterconnected SystemChowdhury, A HasibОценок пока нет
- FaultДокумент27 страницFaultግርማ ገ.Оценок пока нет
- Chapter 1 RegДокумент34 страницыChapter 1 RegAlebel AyalnehОценок пока нет
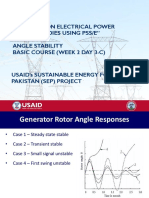
- W-2-Day-3-C - Angle StabilityДокумент17 страницW-2-Day-3-C - Angle StabilityKASHIFОценок пока нет
- Power System Dynamics and ControlДокумент2 страницыPower System Dynamics and ControlSudip MondalОценок пока нет
- Study of Power System Security in Indian Utility 62 Bus SystemДокумент10 страницStudy of Power System Security in Indian Utility 62 Bus SystempjОценок пока нет
- Unit 2 FactsДокумент5 страницUnit 2 FactsHarris RajОценок пока нет
- Lab4 PDFДокумент11 страницLab4 PDFWardencasianAlanisОценок пока нет
- Load ForecastingДокумент30 страницLoad Forecastingyogi_maha50% (2)
- Power System Dynamics and StabilityДокумент52 страницыPower System Dynamics and StabilityJeziel JuárezОценок пока нет
- Power System Stability LectureДокумент17 страницPower System Stability LectureMuhammad Taufan Yoga P.Оценок пока нет
- Optimal Power Flow Solution For Indian Utility 62 Bus SystemДокумент28 страницOptimal Power Flow Solution For Indian Utility 62 Bus Systemyeshitela100% (1)
- A STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality ImprovementДокумент15 страницA STATCOM-Control Scheme For Grid Connected Wind Energy System For Power Quality Improvementk rajendraОценок пока нет
- Symmetrical FaultsДокумент11 страницSymmetrical FaultsNeha RajputОценок пока нет
- Power System Restoration WithДокумент5 страницPower System Restoration WithSandhya ShyamasundarОценок пока нет
- Power Flow StudyДокумент71 страницаPower Flow StudynumansaeedpkОценок пока нет
- One-Line Diagram: Simplified Single-Phase Balanced Three-Phase Single Line Apparatus SymbolsДокумент25 страницOne-Line Diagram: Simplified Single-Phase Balanced Three-Phase Single Line Apparatus SymbolsSafina SygОценок пока нет
- Flexible AC Transmission Syste MS: FactsДокумент29 страницFlexible AC Transmission Syste MS: FactsPrakash MahendranОценок пока нет
- Data SheetДокумент11 страницData SheetSanjaya Kumar SahooОценок пока нет
- EE8702-Power System Operation and ControlДокумент20 страницEE8702-Power System Operation and ControllvijayanandОценок пока нет
- Load Flow and Contingency Analysis in Power SystemsДокумент66 страницLoad Flow and Contingency Analysis in Power Systemsmirsuhail22Оценок пока нет
- 3.6-PSOC Optimized PDFДокумент68 страниц3.6-PSOC Optimized PDFN R SHEKARОценок пока нет
- Iee Unbalanced PDFДокумент5 страницIee Unbalanced PDFDery TriОценок пока нет
- Optimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationДокумент12 страницOptimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationIJAET JournalОценок пока нет
- Introduction To PmuДокумент15 страницIntroduction To PmuMahmoud M. ShahwanОценок пока нет
- J. B. Ward - Equivalent Circuits For Power Flow StudiesДокумент10 страницJ. B. Ward - Equivalent Circuits For Power Flow StudiesfarhanhosseiniОценок пока нет
- Brochures PDFДокумент11 страницBrochures PDFFiroDjinsoNanoОценок пока нет
- Multi-Machine Signal Stability Analysis For Power System: January 2018Документ6 страницMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanОценок пока нет
- Multi-Machine Signal Stability Analysis For Power System: January 2018Документ6 страницMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanОценок пока нет
- Per Unit SystemДокумент5 страницPer Unit SystemJeremy DeleonОценок пока нет
- Dynamic Interactions of Ac Systems and Its Solutions: Thaianbban T A, R. Raja, S. SaravananДокумент6 страницDynamic Interactions of Ac Systems and Its Solutions: Thaianbban T A, R. Raja, S. Saravananthai anbuОценок пока нет
- Rogers G. Demistifying Power System Oscillations. IEEE Computer Applications in Power. 1996Документ6 страницRogers G. Demistifying Power System Oscillations. IEEE Computer Applications in Power. 1996Pablo BurgosОценок пока нет
- CHAPTERS-1,2 NewДокумент14 страницCHAPTERS-1,2 Newthai anbuОценок пока нет
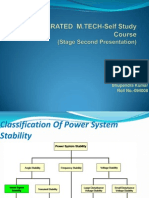
- Bhupendra Kumar Roll No.-094008: Submitted byДокумент36 страницBhupendra Kumar Roll No.-094008: Submitted bytarnedo1Оценок пока нет
- Lec16 PDFДокумент29 страницLec16 PDFSai Krishna VelichetiОценок пока нет
- Topics in Systems and Control II: Department of ElectronicsДокумент13 страницTopics in Systems and Control II: Department of ElectronicsSai Krishna VelichetiОценок пока нет
- HVDC Operation and ControlДокумент11 страницHVDC Operation and ControlSai Krishna VelichetiОценок пока нет
- ELG5106 Fourier Optics Assignment 1 - 2016 - 1Документ2 страницыELG5106 Fourier Optics Assignment 1 - 2016 - 1Sai Krishna VelichetiОценок пока нет
- Powering Laser Diode SystemsДокумент134 страницыPowering Laser Diode SystemsNick100% (1)
- Kunst 1600 Case AnalysisДокумент3 страницыKunst 1600 Case AnalysisrakeshОценок пока нет
- Chapter Two: General Design ConsiderationsДокумент27 страницChapter Two: General Design ConsiderationsTeddy Ekubay GОценок пока нет
- Problems: C D y XДокумент7 страницProblems: C D y XBanana QОценок пока нет
- Admission: North South University (NSU) Question Bank Summer 2019Документ10 страницAdmission: North South University (NSU) Question Bank Summer 2019Mahmoud Hasan100% (7)
- Conflict Management A Practical Guide To Developing Negotiation Strategies Barbara A Budjac Corvette Full ChapterДокумент67 страницConflict Management A Practical Guide To Developing Negotiation Strategies Barbara A Budjac Corvette Full Chapternatalie.schoonmaker930100% (5)
- (Word 365-2019) Mos Word MocktestДокумент4 страницы(Word 365-2019) Mos Word MocktestQuỳnh Anh Nguyễn TháiОценок пока нет
- Handbook On National Spectrum Management 2015Документ333 страницыHandbook On National Spectrum Management 2015Marisela AlvarezОценок пока нет
- (14062020 0548) HF Uniform Logo GuidelinesДокумент4 страницы(14062020 0548) HF Uniform Logo GuidelinesBhargaviОценок пока нет
- 02 Lab 1.HCIДокумент2 страницы02 Lab 1.HCILopao SerojemОценок пока нет
- Per Dev Dlp-1-2 - 3 SelfДокумент6 страницPer Dev Dlp-1-2 - 3 SelfMonisa SocorinОценок пока нет
- Cross Border Data Transfer Consent Form - DecemberДокумент3 страницыCross Border Data Transfer Consent Form - DecemberFIDELIS MUSEMBIОценок пока нет
- HCH - 15 04 004Документ5 страницHCH - 15 04 004NarvaxisОценок пока нет
- Manish Kumar: Desire To Work and Grow in The Field of MechanicalДокумент4 страницыManish Kumar: Desire To Work and Grow in The Field of MechanicalMANISHОценок пока нет
- Diltoids Numberletter Puzzles Activities Promoting Classroom Dynamics Group Form - 38486Документ5 страницDiltoids Numberletter Puzzles Activities Promoting Classroom Dynamics Group Form - 38486sinirsistemiОценок пока нет
- Hume 100 ReviewerДокумент7 страницHume 100 ReviewerShai GaviñoОценок пока нет
- Operation and Service 69UG15: Diesel Generator SetДокумент72 страницыOperation and Service 69UG15: Diesel Generator Setluis aguileraОценок пока нет
- Optimizing Stata For Analysis of Large Data SetsДокумент29 страницOptimizing Stata For Analysis of Large Data SetsTrần Anh TùngОценок пока нет
- Goods Receipt Note: Johnson Controls Air Conditioning and Refrigeration Inc. (YORK) DateДокумент4 страницыGoods Receipt Note: Johnson Controls Air Conditioning and Refrigeration Inc. (YORK) DateSaad PathanОценок пока нет
- Philips HD 9 User ManualДокумент3 страницыPhilips HD 9 User ManualNdangoh DerekОценок пока нет
- Fiedler1950 - A Comparison of Therapeutic Relationships in PsychoanalyticДокумент10 страницFiedler1950 - A Comparison of Therapeutic Relationships in PsychoanalyticAnca-Maria CovaciОценок пока нет
- Bilateral Transfer of LearningДокумент18 страницBilateral Transfer of Learningts2200419Оценок пока нет
- Pamphlet 89 Chlorine Scrubbing SystemsДокумент36 страницPamphlet 89 Chlorine Scrubbing Systemshfguavita100% (4)
- Paper Ed Mid TermДокумент2 страницыPaper Ed Mid Termarun7sharma78Оценок пока нет
- NGCP - Procedures and Requirements For Energy ProjectsДокумент17 страницNGCP - Procedures and Requirements For Energy ProjectspurplebasketОценок пока нет
- Matsusada DC-DC ConvertersДокумент4 страницыMatsusada DC-DC ConvertersAP SinghОценок пока нет
- JCPS School Safety PlanДокумент14 страницJCPS School Safety PlanDebbie HarbsmeierОценок пока нет
- I.A.-1 Question Bank EM-3 (Answers)Документ11 страницI.A.-1 Question Bank EM-3 (Answers)UmmОценок пока нет
- Causal Emergence - HoelДокумент18 страницCausal Emergence - HoelFelipe LopesОценок пока нет
- DA-I Question Bank From Module 1-3 of PHY1701 Course, Winter Semester 2020-21Документ6 страницDA-I Question Bank From Module 1-3 of PHY1701 Course, Winter Semester 2020-21Likith MallipeddiОценок пока нет