Вам также может понравиться
- Drenth Display Unit USB Manual 2013-5Документ20 страницDrenth Display Unit USB Manual 2013-5Lucas Nicolás MartinezОценок пока нет
- Southern Marine Engineering Desk Reference: Second Edition Volume IiОт EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiОценок пока нет
- Rfactor Calculation InstructionsДокумент6 страницRfactor Calculation InstructionsACTRОценок пока нет
- 2011 REV SAE Suspension Kiszco PDFДокумент112 страниц2011 REV SAE Suspension Kiszco PDFRushik KudaleОценок пока нет
- Optimumt Product Description: Key FeaturesДокумент6 страницOptimumt Product Description: Key FeaturesPierre LalsingОценок пока нет
- Math (F5) - Gradient and Area Under A GraphДокумент26 страницMath (F5) - Gradient and Area Under A GraphRoszelan MajidОценок пока нет
- Vehicle Suspension Modeling NotesДокумент25 страницVehicle Suspension Modeling Notesahmetlutfu100% (2)
- CG Height Calculator - Automotive Brake System Calculator - BRAKE POWERДокумент2 страницыCG Height Calculator - Automotive Brake System Calculator - BRAKE POWERAnonymous QiMB2lBCJLОценок пока нет
- MF52 EquationManualДокумент41 страницаMF52 EquationManualFelipe100% (1)
- Real Time Simulation and Parametric Optimization Applied To Racing Cars The BMW Team Brasil Case PDFДокумент47 страницReal Time Simulation and Parametric Optimization Applied To Racing Cars The BMW Team Brasil Case PDFDebra JacksonОценок пока нет
- Development and Experimental Verification of A Parametric Model of An Automotive DamperДокумент126 страницDevelopment and Experimental Verification of A Parametric Model of An Automotive DamperMrudula Amar WardeОценок пока нет
- Team Teaching Presentation How Car Suspension WorksДокумент17 страницTeam Teaching Presentation How Car Suspension Worksmsaad19103564Оценок пока нет
- Slip Angle Explained Race Logic PDFДокумент8 страницSlip Angle Explained Race Logic PDFyeshwantambureОценок пока нет
- Brakes Analysis of BAJA ATVДокумент4 страницыBrakes Analysis of BAJA ATVInfogain publication100% (3)
- The Basic Nature of Vehicle Understeer-OversteerДокумент36 страницThe Basic Nature of Vehicle Understeer-OversteerRTCNОценок пока нет
- Porsche Chassis DevelopmentДокумент18 страницPorsche Chassis DevelopmentArif OthmanОценок пока нет
- Brake Design 2Документ3 страницыBrake Design 2Aakash SharmaОценок пока нет
- Tire-Road Friction CoefficientДокумент11 страницTire-Road Friction CoefficientAnonymous Hy5Ir9QXОценок пока нет
- Vehicle AerodynamicsДокумент31 страницаVehicle AerodynamicsNimisha Singh100% (1)
- Tutorial 1 - Importing Data: 1. Loading A FileДокумент9 страницTutorial 1 - Importing Data: 1. Loading A FileDavid López AlmirallОценок пока нет
- How Steering WorksДокумент10 страницHow Steering WorksMarliana Bt Omar BakhiОценок пока нет
- All You Need To Know About Differentials PDFДокумент107 страницAll You Need To Know About Differentials PDFJay100% (1)
- Driveline Dynamics NotesДокумент19 страницDriveline Dynamics NotesprabhjotbhangalОценок пока нет
- OptimumLap Getting StartedДокумент17 страницOptimumLap Getting StartedAyushОценок пока нет
- Double WishboneДокумент6 страницDouble WishboneRian SteveОценок пока нет
- Technical FAQ BAJA SAEДокумент15 страницTechnical FAQ BAJA SAEAbhishek Pathak100% (1)
- SAE Mini BAJA: Suspension and Steering: Concept GenerationДокумент16 страницSAE Mini BAJA: Suspension and Steering: Concept GenerationPrashant DubeyОценок пока нет
- RCE4Документ3 страницыRCE4Ketan JainОценок пока нет
- AC Worksheet v016Документ82 страницыAC Worksheet v016Игорь БелецкийОценок пока нет
- A Study of Kinetic Energy Recovery SystemsДокумент57 страницA Study of Kinetic Energy Recovery SystemsMohammad Usman0% (1)
- The Role of The Moving Ground For Automotive Wind Tunnel Testing On Race CarsДокумент10 страницThe Role of The Moving Ground For Automotive Wind Tunnel Testing On Race CarsVyssionОценок пока нет
- Tyre Report SampleДокумент5 страницTyre Report SampleArka PatraОценок пока нет
- Vehicle Aerodynamics Intro04Документ44 страницыVehicle Aerodynamics Intro04Marcos SoarОценок пока нет
- 253 Suspension Calc ExplainedДокумент1 страница253 Suspension Calc ExplainedholaqОценок пока нет
- Understanding The Limitations of Different Vehicle Models For Roll Dynamics StudiesДокумент27 страницUnderstanding The Limitations of Different Vehicle Models For Roll Dynamics StudiesAntonio Navarrete0% (1)
- Brake Force CalculationДокумент25 страницBrake Force CalculationVicky TjОценок пока нет
- Bump SteerДокумент5 страницBump SteerHimanshu RajputОценок пока нет
- Research Paper SuspensionДокумент7 страницResearch Paper SuspensionAnirudh GuptaОценок пока нет
- The Magic Formula Tyre ModelДокумент19 страницThe Magic Formula Tyre ModelgholmalikОценок пока нет
- Vehicle Roll EstimatorДокумент10 страницVehicle Roll EstimatorRaja Amer AzimОценок пока нет
- FSAE Data Analysis Day 2 To PrintДокумент55 страницFSAE Data Analysis Day 2 To PrintJorge CorderoОценок пока нет
- Maths 2018 PamphletДокумент176 страницMaths 2018 PamphletKristen BandaОценок пока нет
- Aerodynamics of Gurney Flaps On A Wing in Ground EffectДокумент9 страницAerodynamics of Gurney Flaps On A Wing in Ground EffectVyssionОценок пока нет
- Ackermann Steering For Performance Race Cars PDFДокумент22 страницыAckermann Steering For Performance Race Cars PDFr2d23Оценок пока нет
- Applied Vehicle Dynamics Seminar April 7-10, 2017 Sinhgad Technical Education Society - Pune, IndiaДокумент2 страницыApplied Vehicle Dynamics Seminar April 7-10, 2017 Sinhgad Technical Education Society - Pune, IndiaPRAVEEN REDDY100% (1)
- Suspension Analyzer ManualДокумент156 страницSuspension Analyzer ManualSankalp SharmaОценок пока нет
- Integration of Magic Formula Tire Model With Vehicle Handling ModelДокумент7 страницIntegration of Magic Formula Tire Model With Vehicle Handling ModelFabio Bazakas ZetolaОценок пока нет
- Suspension Analysis PDFДокумент5 страницSuspension Analysis PDFramsaiОценок пока нет
- Car Aerodynamics (Lecture) - NewДокумент77 страницCar Aerodynamics (Lecture) - NewKenneth Frank100% (1)
- Virtualwindtunnel EbookДокумент78 страницVirtualwindtunnel EbookEfrain Diaz Garcia100% (1)
- Find Your Roll CenterДокумент20 страницFind Your Roll CenterchainplatesОценок пока нет
- Chassis Newsletter 2010.8Документ3 страницыChassis Newsletter 2010.8Ganesh ShanmugamОценок пока нет
- 03 - Aerodynamics and Race CarsДокумент13 страниц03 - Aerodynamics and Race CarsFabio BosioОценок пока нет
- Developments of A Method For Lap Time SimulationДокумент7 страницDevelopments of A Method For Lap Time SimulationRodrigo Bob100% (1)
- Cosworth Data Bytes Live - Pi Toolbox v0 8Документ41 страницаCosworth Data Bytes Live - Pi Toolbox v0 8Guilherme PfeilstickerОценок пока нет
- Chapter-4 PTD NewДокумент29 страницChapter-4 PTD NewGODОценок пока нет
- VDHS 11 Suspension DesignДокумент53 страницыVDHS 11 Suspension DesignSantiago UrgilesОценок пока нет
- Vehicle Suspension DesignДокумент63 страницыVehicle Suspension DesignVenkatesh ChegireddyОценок пока нет
- Stress Strain Diagrams: Total MateriaДокумент2 страницыStress Strain Diagrams: Total MateriaVeraniJОценок пока нет
- ASTER Free FEM SoftwareДокумент16 страницASTER Free FEM SoftwareelenamoisoniОценок пока нет
- 02 Jus2016Документ16 страниц02 Jus2016VeraniJОценок пока нет
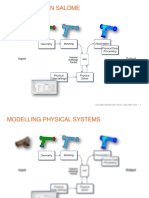
- Plaquette SALOME V7Документ8 страницPlaquette SALOME V7VeraniJОценок пока нет
- Loft Tube 1 CompleteДокумент28 страницLoft Tube 1 CompleteVeraniJОценок пока нет
- Ticona - 2011-12-08Документ1 страницаTicona - 2011-12-08VeraniJОценок пока нет
- Filter Box An Alibre Design Tutorial by CDS: Written by Steve Carr All Rights Reserved @by CDS 05-29-06Документ25 страницFilter Box An Alibre Design Tutorial by CDS: Written by Steve Carr All Rights Reserved @by CDS 05-29-06VeraniJОценок пока нет
- Inlet Manifold An Alibre Design Tutorial by CDS: Written by Steve Carr All Rights Reserved @by CDS 06-04-05Документ43 страницыInlet Manifold An Alibre Design Tutorial by CDS: Written by Steve Carr All Rights Reserved @by CDS 06-04-05VeraniJОценок пока нет
- 06 SafДокумент67 страниц06 SafOleksandr U.Оценок пока нет
- Calculations and Graphs ReportДокумент11 страницCalculations and Graphs ReportKenneth C.LinojОценок пока нет
- Shock AbsorberДокумент21 страницаShock AbsorberSlamet ArifinОценок пока нет
- Super Pro Catalogue V13Документ342 страницыSuper Pro Catalogue V13Miles Webster100% (1)
- Assignment 4 SuspensionДокумент3 страницыAssignment 4 SuspensionAdam LuqmanОценок пока нет
- QRG Grammer Seats en SDДокумент28 страницQRG Grammer Seats en SDEric SimardОценок пока нет
- Rockshox Suspension Oil-Air Charts 2016Документ7 страницRockshox Suspension Oil-Air Charts 2016Jose Luis GutierrezОценок пока нет
- Catalog 217: and AbbreviationsДокумент120 страницCatalog 217: and Abbreviationscusip1Оценок пока нет
- Design Consideration of ShaftДокумент6 страницDesign Consideration of Shaftpriyankar007Оценок пока нет
- Tecknosim Training Services: AnswersДокумент2 страницыTecknosim Training Services: Answerschandresh ranaОценок пока нет
- Volvo FH Air Suspension DiagramДокумент22 страницыVolvo FH Air Suspension DiagramSherzad Chem95% (20)
- Team Teaching Presentation How Car Suspension WorksДокумент17 страницTeam Teaching Presentation How Car Suspension Worksmsaad19103564Оценок пока нет
- Active Suspension SystemДокумент24 страницыActive Suspension SystemmujeebОценок пока нет
- Suspension Design ReportДокумент4 страницыSuspension Design ReportMeet MehtaОценок пока нет
- Aashto ESAL TablesДокумент19 страницAashto ESAL TablesgarhgelhОценок пока нет
- Difference Between Bump Steer and Roll SteerДокумент1 страницаDifference Between Bump Steer and Roll SteerAramis SchultzОценок пока нет
- Pe Sae-Gigant-2015Документ36 страницPe Sae-Gigant-2015Dan RosoiuОценок пока нет
- 14c 604.01.046.10 Pci-1.601 C1a PDFДокумент96 страниц14c 604.01.046.10 Pci-1.601 C1a PDFManuais De Catálogos Jose Carlos0% (1)
- An Introduction To Automotive Suspension SystemsДокумент19 страницAn Introduction To Automotive Suspension Systemstadi2k488% (8)
- Parts List: SL Series 8K, 10K, 13KДокумент16 страницParts List: SL Series 8K, 10K, 13KHector Enrique Gamboa SeguraОценок пока нет
- 2011 FOXHelp Owners Manual AceiteДокумент6 страниц2011 FOXHelp Owners Manual Aceiteserfrio motos riasОценок пока нет
- D4B80423F1E-Running Gear Axles SteeringДокумент317 страницD4B80423F1E-Running Gear Axles SteeringRuss HoweОценок пока нет
- Tindak Lanjut Data Stock Update Spring 26 - 03 - 2021Документ4 страницыTindak Lanjut Data Stock Update Spring 26 - 03 - 2021Jani WanganiaОценок пока нет
- Vishwakarma Institute of Technology: A Seminar Report OnДокумент17 страницVishwakarma Institute of Technology: A Seminar Report OnAmir RОценок пока нет
- 1.2.4 Panhard Rod Beam-Me SuspensionДокумент2 страницы1.2.4 Panhard Rod Beam-Me SuspensionFirdaus Doni SaputraОценок пока нет
- Öhlins Tools Manual: IncludingДокумент32 страницыÖhlins Tools Manual: IncludingTiyok HidrolikОценок пока нет
- Axle SuspensionДокумент50 страницAxle SuspensionAnd DronОценок пока нет
- SX CAT EBook Shock-Absorbers-PC IN V01 PDFДокумент1 064 страницыSX CAT EBook Shock-Absorbers-PC IN V01 PDFRuiuОценок пока нет
- Soal PSSMДокумент53 страницыSoal PSSMHadi HafizОценок пока нет
- Independent Suspensions: Swing Axle SuspensionДокумент3 страницыIndependent Suspensions: Swing Axle SuspensionMonelis WidyatamaОценок пока нет
- Allison Transmissions: How to Rebuild & Modify: How to Rebuild & ModifyОт EverandAllison Transmissions: How to Rebuild & Modify: How to Rebuild & ModifyРейтинг: 5 из 5 звезд5/5 (1)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestОт EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestРейтинг: 4 из 5 звезд4/5 (28)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerОт EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerРейтинг: 4.5 из 5 звезд4.5/5 (54)
- How to Fabricate Automotive Fiberglass & Carbon Fiber PartsОт EverandHow to Fabricate Automotive Fiberglass & Carbon Fiber PartsРейтинг: 5 из 5 звезд5/5 (4)
- Powder Coating: A How-to Guide for Automotive, Motorcycle, and Bicycle PartsОт EverandPowder Coating: A How-to Guide for Automotive, Motorcycle, and Bicycle PartsРейтинг: 4.5 из 5 звезд4.5/5 (17)
- CDL Study Guide 2024-2025: Everything You Need to Know to Pass the Commercial Driver’s License Exam on your First Attempt, with the Most Complete and Up-to-Date Practice Tests - New VersionОт EverandCDL Study Guide 2024-2025: Everything You Need to Know to Pass the Commercial Driver’s License Exam on your First Attempt, with the Most Complete and Up-to-Date Practice Tests - New VersionРейтинг: 5 из 5 звезд5/5 (2)
- Small Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsОт EverandSmall Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsОценок пока нет
- Modern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingОт EverandModern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingРейтинг: 4.5 из 5 звезд4.5/5 (9)
- Why We Drive: Toward a Philosophy of the Open RoadОт EverandWhy We Drive: Toward a Philosophy of the Open RoadРейтинг: 4.5 из 5 звезд4.5/5 (21)
- High-Performance Cams & Valvetrains: Theory, Technology, and Selection: Theory, Technology, and SelectionОт EverandHigh-Performance Cams & Valvetrains: Theory, Technology, and Selection: Theory, Technology, and SelectionОценок пока нет
- How to Drive: Real World Instruction and Advice from Hollywood's Top DriverОт EverandHow to Drive: Real World Instruction and Advice from Hollywood's Top DriverРейтинг: 4 из 5 звезд4/5 (17)
- Maintenance Excellence: Principles, Practices, and Future TrendsОт EverandMaintenance Excellence: Principles, Practices, and Future TrendsОценок пока нет
- Competition Engine Building: Advanced Engine Design and Assembly TechniquesОт EverandCompetition Engine Building: Advanced Engine Design and Assembly TechniquesРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Trucking Business Startup: Build a Long-Term, Highly Profitable Trucking Company From Scratch in Just 30 Days Using Up-to-Date Expert Business Success SecretsОт EverandTrucking Business Startup: Build a Long-Term, Highly Profitable Trucking Company From Scratch in Just 30 Days Using Up-to-Date Expert Business Success SecretsРейтинг: 5 из 5 звезд5/5 (2)