Вам также может понравиться
- WH1602 XXX BДокумент1 страницаWH1602 XXX Bnad_chadi8816Оценок пока нет
- A Few Useful Formulas For Magnetic Products DesignДокумент7 страницA Few Useful Formulas For Magnetic Products Designnad_chadi8816Оценок пока нет
- Embedded Systems DesignДокумент576 страницEmbedded Systems Designnad_chadi8816100% (4)
- Antenna Measurements: Experiment-3Документ6 страницAntenna Measurements: Experiment-3nad_chadi8816Оценок пока нет
- Microwave ComponentsДокумент8 страницMicrowave Componentsnad_chadi8816Оценок пока нет
- Data Sheet: HSMS-8101, 8202, 8207, 8209Документ6 страницData Sheet: HSMS-8101, 8202, 8207, 8209nad_chadi8816Оценок пока нет
- 415 CNC Ballscrew End Support Bk12-Bf12Документ2 страницы415 CNC Ballscrew End Support Bk12-Bf12nad_chadi8816Оценок пока нет
- Models - Rf.wilkinson Power DividerДокумент24 страницыModels - Rf.wilkinson Power Dividernad_chadi8816Оценок пока нет
- 6/22/2015 6:59:19 PM F 0.81 D:/Eproject/Stepper Motor Gauges/Stepper Project/Schematic/Motor Diodes - SCH (Sheet: 1/1)Документ1 страница6/22/2015 6:59:19 PM F 0.81 D:/Eproject/Stepper Motor Gauges/Stepper Project/Schematic/Motor Diodes - SCH (Sheet: 1/1)nad_chadi8816Оценок пока нет
- Serial Peripheral Interface (SPI) : Microprocessors and MicrocontrollersДокумент30 страницSerial Peripheral Interface (SPI) : Microprocessors and Microcontrollersnad_chadi8816100% (1)
- Unit of Measure - DB, DBD, DBi, DBM, DBW and DBMVДокумент8 страницUnit of Measure - DB, DBD, DBi, DBM, DBW and DBMVnad_chadi8816Оценок пока нет
- STR S6709Документ8 страницSTR S6709nad_chadi8816Оценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Genetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)Документ67 страницGenetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)rajsign5100% (3)
- Sap Basis Transaction CodesДокумент2 страницыSap Basis Transaction CodeskatrinbreaksОценок пока нет
- FAR21x7 28x7 Operator's Manual P 4-8-11Документ312 страницFAR21x7 28x7 Operator's Manual P 4-8-11Miguel PerezОценок пока нет
- Programming in C - CPU Scheduling - Round RobinДокумент3 страницыProgramming in C - CPU Scheduling - Round RobinGenus SumОценок пока нет
- Slide 1: No-Churn TelecomДокумент11 страницSlide 1: No-Churn Telecomleongladxton100% (1)
- Understanding The Relationship Between Human Behavior and Susceptibility To Cyber AttacksДокумент25 страницUnderstanding The Relationship Between Human Behavior and Susceptibility To Cyber AttacksVelibor SabanОценок пока нет
- Nadella Cam Follower PF810EДокумент22 страницыNadella Cam Follower PF810EAldair MezaОценок пока нет
- Klüberpaste HS 91-21 EN enДокумент4 страницыKlüberpaste HS 91-21 EN entroy2k0Оценок пока нет
- Astm C97/C97M-09Документ3 страницыAstm C97/C97M-09Azuriak150% (2)
- Hydrogen Production From Water Electrolysis: Role of CatalystsДокумент23 страницыHydrogen Production From Water Electrolysis: Role of CatalystsFreddy Negron HuamaniОценок пока нет
- Slab DesignДокумент96 страницSlab Designdilrangi100% (2)
- PowerPoint Practice Exercise 1 InstructionsДокумент3 страницыPowerPoint Practice Exercise 1 InstructionsErick OumaОценок пока нет
- Alkyl Halides and Amines Mcqs KeyДокумент3 страницыAlkyl Halides and Amines Mcqs KeySameer HussainОценок пока нет
- MADNotes J2MEДокумент34 страницыMADNotes J2MEKanchana MorumpalliОценок пока нет
- How Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorДокумент4 страницыHow Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorLucien GbezeОценок пока нет
- Satellite Communication Module 4Документ34 страницыSatellite Communication Module 4JKОценок пока нет
- Highway Structures: Design (Substructures and Special Structures), Materials Section 2 Special StructuresДокумент5 страницHighway Structures: Design (Substructures and Special Structures), Materials Section 2 Special Structuresror77Оценок пока нет
- Mozart Symphony 6 TimpaniДокумент2 страницыMozart Symphony 6 Timpaniגיל עברוןОценок пока нет
- Hydraulic Calculation Forms and Water Supply Information: San José Fire DepartmentДокумент3 страницыHydraulic Calculation Forms and Water Supply Information: San José Fire Departmentperie anugrahaОценок пока нет
- Introduction To Computer Networks: NetworkДокумент61 страницаIntroduction To Computer Networks: NetworkSaihari NarayanОценок пока нет
- Experiment 08-A2dДокумент3 страницыExperiment 08-A2dapi-277396867Оценок пока нет
- 6-OpProfiles PrintableДокумент32 страницы6-OpProfiles PrintableGon_1313Оценок пока нет
- Astron: MFL Testing Procedure For Tank FloorДокумент16 страницAstron: MFL Testing Procedure For Tank FloorleonciomavarezОценок пока нет
- Nama: Ketut Dian Caturini NIM: 1813011007 Kelas: 7B Tugas 2Документ3 страницыNama: Ketut Dian Caturini NIM: 1813011007 Kelas: 7B Tugas 2Sri AgustiniОценок пока нет
- Joining ProcessДокумент122 страницыJoining ProcessJackson ..Оценок пока нет
- Converting CLOBs 2 VARCHARДокумент15 страницConverting CLOBs 2 VARCHARMa GicОценок пока нет
- Is 4031 Part 4 - ConsistencyДокумент4 страницыIs 4031 Part 4 - ConsistencyCrypto AbhishekОценок пока нет
- Calculate Quantities of Materials For Concrete - Cement, Sand, AggregatesДокумент7 страницCalculate Quantities of Materials For Concrete - Cement, Sand, Aggregatesvenkateswara rao pothinaОценок пока нет
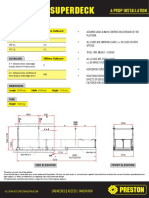
- SuperDeck All ModelsДокумент12 страницSuperDeck All Modelsarthur chungОценок пока нет
- CS405PC JP Unit-3Документ44 страницыCS405PC JP Unit-3MEGHANA 3Оценок пока нет