Вам также может понравиться
- Controle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocОт EverandControle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocОценок пока нет
- LABSD1Документ41 страницаLABSD1Rafael Monteiro100% (1)
- Aula prática sobre portas lógicas e displays de 7 segmentosДокумент21 страницаAula prática sobre portas lógicas e displays de 7 segmentosPaulo SilvaОценок пока нет
- Exp Lab Sistemas DigitaisДокумент33 страницыExp Lab Sistemas DigitaisautojhОценок пока нет
- TRB SDC-2022 S1 220623 192038Документ2 страницыTRB SDC-2022 S1 220623 192038Soares ViníciusОценок пока нет
- Lista de Exercicios Circuitos LógicosДокумент3 страницыLista de Exercicios Circuitos LógicosAndre BomjardimОценок пока нет
- Relatorio RelogioДокумент15 страницRelatorio RelogioMario Gato Jr.Оценок пока нет
- 3° Relatório - Sistemas - DigitaisДокумент12 страниц3° Relatório - Sistemas - DigitaisPaulo ReisОценок пока нет
- Apostila - 2004v1 74151Документ37 страницApostila - 2004v1 74151luciocadastroОценок пока нет
- Codificadores Binário-Gray 4-bitsДокумент7 страницCodificadores Binário-Gray 4-bitsRonildo NicodemosОценок пока нет
- Relatorio Aula Pratica 3Документ14 страницRelatorio Aula Pratica 3Paulo Cesar Menegon CastroОценок пока нет
- Aulas Práticas Eletronica Digital I PDFДокумент35 страницAulas Práticas Eletronica Digital I PDFVictor CamposОценок пока нет
- Implementação de Função Lógica com TTLДокумент6 страницImplementação de Função Lógica com TTLJEREMIAS BORGESОценок пока нет
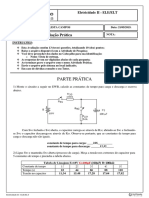
- Avaliação Prática - Eletricidade IIДокумент6 страницAvaliação Prática - Eletricidade IINilton CamposОценок пока нет
- 14 Pratica 6 Curva Caracteristica MOSFET 2018 3Документ4 страницы14 Pratica 6 Curva Caracteristica MOSFET 2018 3Bruno MartinsОценок пока нет
- Relatorio Contador OriginalДокумент12 страницRelatorio Contador OriginalFofuchinho MphiliОценок пока нет
- 1° Relatorio Portas LogicasДокумент13 страниц1° Relatorio Portas LogicasJosé Ilton100% (2)
- Relatório Projeto SemáforoДокумент7 страницRelatório Projeto SemáforoJucelino JúniorОценок пока нет
- CONCURSO ELETRÔNICA IFALДокумент20 страницCONCURSO ELETRÔNICA IFALOliveira JMОценок пока нет
- Amplificadores Operacionais e seus CircuitosДокумент9 страницAmplificadores Operacionais e seus CircuitossricardofОценок пока нет
- Teste Diagnóstico - EE-Mod - 13 - 2011-12Документ4 страницыTeste Diagnóstico - EE-Mod - 13 - 2011-12magante50Оценок пока нет
- MUXDemuxДокумент33 страницыMUXDemuxXavier Luieno Mualilo0% (1)
- Contadores AssincronosДокумент30 страницContadores AssincronosGabriel ConjoОценок пока нет
- Exemplos AutomaçãoДокумент55 страницExemplos AutomaçãoTiago FariaОценок пока нет
- Somador Completo e Meio SomadorДокумент24 страницыSomador Completo e Meio SomadorKarinesaОценок пока нет
- Física Dos Semicondutores: Prof. Dr. Daniel Flores CortezДокумент53 страницыFísica Dos Semicondutores: Prof. Dr. Daniel Flores CortezJoberth SilvaОценок пока нет
- Exercicios de Aplicacoes para o GRAFCETДокумент7 страницExercicios de Aplicacoes para o GRAFCETcheguevaraeng100% (1)
- Circuitos Lógicos MSI Codificadores MultiplexadoresДокумент15 страницCircuitos Lógicos MSI Codificadores MultiplexadoresAbel companhiaОценок пока нет
- Processamento Sinais AutomaçãoДокумент33 страницыProcessamento Sinais AutomaçãoPatrick FranciscoОценок пока нет
- Automatos ProgramaveisДокумент24 страницыAutomatos ProgramaveisJorge B. MartinsОценок пока нет
- Exercicios de Logica Digital - Lista 1Документ4 страницыExercicios de Logica Digital - Lista 1Paulo DiasОценок пока нет
- Controle PID análogico: circuitos e ações proporcional, integral e derivativaДокумент27 страницControle PID análogico: circuitos e ações proporcional, integral e derivativaPedro NavarroОценок пока нет
- 7219-E-7221-Display de Leds de 7 SegmentosДокумент8 страниц7219-E-7221-Display de Leds de 7 SegmentosotoОценок пока нет
- Circuito Combinacional do Jo-Ken-Po em 38 PortasДокумент4 страницыCircuito Combinacional do Jo-Ken-Po em 38 PortasCarlos OrsettiОценок пока нет
- Projeto e Trabalho Prático de Sistemas DigitaisДокумент2 страницыProjeto e Trabalho Prático de Sistemas DigitaisMarcelo LucasОценок пока нет
- MicroLogix1400 UMДокумент369 страницMicroLogix1400 UMKarlita M.Оценок пока нет
- Relatório Prática 1 Eletrônica DigitalДокумент9 страницRelatório Prática 1 Eletrônica DigitalJefferson Cavalcante0% (1)
- Protocolo AS-I: Visão Geral emДокумент48 страницProtocolo AS-I: Visão Geral emfelipeo83Оценок пока нет
- Instalações Elétricas Industriais: Curto-circuito, Partida de Motores e SubestaçõesДокумент8 страницInstalações Elétricas Industriais: Curto-circuito, Partida de Motores e SubestaçõesCesar Pereira100% (1)
- LED Display 7 SegmentosДокумент5 страницLED Display 7 SegmentosCristian NunesОценок пока нет
- Introdução aos TransistoresДокумент79 страницIntrodução aos TransistoresDaniel Bello BoaventuraОценок пока нет
- Relatorio InversorДокумент15 страницRelatorio InversorMauricio LorenzetОценок пока нет
- Redes Industriais - Introdução à Camadas e PadrõesДокумент406 страницRedes Industriais - Introdução à Camadas e PadrõesAmanda Do CarmoОценок пока нет
- Controle de reservatório usando CLP e sensores de nívelДокумент3 страницыControle de reservatório usando CLP e sensores de nívelLeonardo GonçalvesОценок пока нет
- Aula IFF - Linguagem Ladder - Blocos MatemáticosДокумент10 страницAula IFF - Linguagem Ladder - Blocos MatemáticosVictor BarretoОценок пока нет
- Reguladores 78XX: circuitos práticos com até 1AДокумент6 страницReguladores 78XX: circuitos práticos com até 1Aluisce28Оценок пока нет
- Modelagem de Um Sistema Bola e Barra (Ball and Beam)Документ22 страницыModelagem de Um Sistema Bola e Barra (Ball and Beam)americo079100% (1)
- Cálculo de resistor para LED em atéДокумент2 страницыCálculo de resistor para LED em atéAkeem OjediranОценок пока нет
- Grafcet para Ladder - ExercíciosДокумент7 страницGrafcet para Ladder - ExercíciosEmerson HermesОценок пока нет
- Introdução A Eletronica Digital IДокумент23 страницыIntrodução A Eletronica Digital IHans DarnwellОценок пока нет
- Micro1 ListaДокумент9 страницMicro1 ListaNaone_Lopes_5752Оценок пока нет
- EA Lista02 TransistoresДокумент6 страницEA Lista02 TransistoresGleibson Cardoso100% (1)
- Medição Tensão OsciloscópioДокумент3 страницыMedição Tensão OsciloscópioEzequiel da Silva Ferreira100% (1)
- Guia Usuario Alarme Intelbras AMT2018EДокумент2 страницыGuia Usuario Alarme Intelbras AMT2018EPauloJaponeisОценок пока нет
- Introdução Aos MicrocontroladoresДокумент33 страницыIntrodução Aos MicrocontroladoresMarcos0% (1)
- Eletrônica de Potência Combina Potência, Eletrônica e ControleДокумент32 страницыEletrônica de Potência Combina Potência, Eletrônica e ControleLaís OliveiraОценок пока нет
- MSDДокумент236 страницMSDfelipe__euОценок пока нет
- Projeto de Controle 2Документ9 страницProjeto de Controle 2felipe__euОценок пока нет
- Diretrizes para AutoresДокумент5 страницDiretrizes para AutoresJu DouradoОценок пока нет
- Analise de DesempenhoДокумент112 страницAnalise de DesempenhoEsron SilvaОценок пока нет
- Analise de DesempenhoДокумент112 страницAnalise de DesempenhoEsron SilvaОценок пока нет
- Ponte HДокумент6 страницPonte HMarcus SollyvanОценок пока нет
- Dicas para Documentação de SoftwaresДокумент4 страницыDicas para Documentação de Softwaresfelipe__euОценок пока нет
- Como Tocar Violão em 7 DiasДокумент45 страницComo Tocar Violão em 7 DiasEdilene Eco0% (1)
- Representação Paccola - Comissão de ÉticaДокумент10 страницRepresentação Paccola - Comissão de ÉticaAlexandre ApráОценок пока нет
- Compressores de ArДокумент7 страницCompressores de ArEngmouraОценок пока нет
- Temas OSCE Med USP-BRU 2023-1Документ4 страницыTemas OSCE Med USP-BRU 2023-1Gabriel Takeshi OrikasaОценок пока нет
- A CorrenteДокумент54 страницыA CorrenteRoberto FerreiraОценок пока нет
- Gestão de Projetos e EmpreendedorismoДокумент4 страницыGestão de Projetos e EmpreendedorismoPaula ChapoutoОценок пока нет
- Checklist betoneira elétricaДокумент2 страницыChecklist betoneira elétricaJULIO CESAR CAMARGOОценок пока нет
- Estatuto jurídico das empresas estatais e licitações públicasДокумент12 страницEstatuto jurídico das empresas estatais e licitações públicasgisabcosta100% (3)
- TH 42PV70LBДокумент150 страницTH 42PV70LBEgnaldo Pieretti100% (1)
- Diretrizes para Avaliação e Validação Do Potencial Doador de Órgãos em Morte EncefálicaДокумент36 страницDiretrizes para Avaliação e Validação Do Potencial Doador de Órgãos em Morte EncefálicaDrLuiz Henrique T GuerraОценок пока нет
- Funções exponenciais e logaritmosДокумент5 страницFunções exponenciais e logaritmosRicardo Jorge Rebelo FonsecaОценок пока нет
- Administração Aplicada A EnfermagemДокумент77 страницAdministração Aplicada A EnfermagemJuliana Patricio100% (1)
- Atividade Avaliativa LiteraturaДокумент1 страницаAtividade Avaliativa LiteraturaBianca AlcatrãoОценок пока нет
- A Ferrovia e A Cidade de Parnaíba, 1916-1960Документ247 страницA Ferrovia e A Cidade de Parnaíba, 1916-1960AnaОценок пока нет
- Relatorio - Modelo PRPGI (Pibic e Pibiti)Документ12 страницRelatorio - Modelo PRPGI (Pibic e Pibiti)mathsantosОценок пока нет
- 4 - 1 João 1.5-10 - Como Ter Comunhão Com DeusДокумент9 страниц4 - 1 João 1.5-10 - Como Ter Comunhão Com DeusJoão BritoОценок пока нет
- Projeto de Intervenção de Estágio Básico I .Документ4 страницыProjeto de Intervenção de Estágio Básico I .lucasovogelОценок пока нет
- S-A2s2-Fisiopat (T11)Документ229 страницS-A2s2-Fisiopat (T11)DiogoFevereiroОценок пока нет
- Pare de Se Enganar - Sucesso Pede Autoconhecimento - EXAMEДокумент9 страницPare de Se Enganar - Sucesso Pede Autoconhecimento - EXAMELyu AngelОценок пока нет
- Sepam 80 FuncoesДокумент272 страницыSepam 80 FuncoesEricsson VendraminiОценок пока нет
- Detalhes biográficos de Stiepan TrofímovitchДокумент447 страницDetalhes biográficos de Stiepan TrofímovitchGustavo Henrique100% (4)
- Concepções pedagógicas de professores de Educação Física no Ensino Médio de IçaraДокумент53 страницыConcepções pedagógicas de professores de Educação Física no Ensino Médio de IçaraLucas BritoОценок пока нет
- Proposta de AvaliaçãoДокумент10 страницProposta de AvaliaçãoMiguel franklinОценок пока нет
- Orientação e medidas com o SolДокумент12 страницOrientação e medidas com o SolDaniel PetersОценок пока нет
- Atividade Revisão F6 Mensal 1ºbimДокумент4 страницыAtividade Revisão F6 Mensal 1ºbimTalita MazzaliОценок пока нет
- CAMPYLOBACTER JEJUNI - SeminárioДокумент10 страницCAMPYLOBACTER JEJUNI - SeminárioAna Elisa Pereira AntônioОценок пока нет
- Apostila Office FiscalДокумент148 страницApostila Office FiscalCamila DominguesОценок пока нет
- Pontos Extras CaesДокумент42 страницыPontos Extras CaesArgemiroJunior0% (1)
- Res Normativa 800-17 - Regulamentação Da CDE e Procedimentos Tarifários - ConergeДокумент13 страницRes Normativa 800-17 - Regulamentação Da CDE e Procedimentos Tarifários - ConergeBGP10Оценок пока нет
- Escudo de Ouro e BronzeДокумент10 страницEscudo de Ouro e BronzealmeidaОценок пока нет