Вам также может понравиться
- Navisworks BasicTrainingДокумент54 страницыNavisworks BasicTrainingMadhankumarОценок пока нет
- 13 Electric Motor HandbookДокумент317 страниц13 Electric Motor HandbookWâhýûðî Fãjâr67% (3)
- Calculation of Optimum Fishing TimeДокумент11 страницCalculation of Optimum Fishing TimeÇağlar Öztürk100% (2)
- 6 - Auxiliary ViewДокумент23 страницы6 - Auxiliary Viewapi-3815216100% (4)
- CHAPTER 6 Coordinate Geometry Module ExercisesДокумент15 страницCHAPTER 6 Coordinate Geometry Module ExercisesBid Hassan75% (8)
- Modelling of IM Using DQ TransformationДокумент64 страницыModelling of IM Using DQ Transformationdivinelight100% (1)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsОт EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsОценок пока нет
- 2.design and Analysis of Escalator FrameДокумент7 страниц2.design and Analysis of Escalator FrameSyamil Dzulfida100% (1)
- Effect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteДокумент26 страницEffect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteDIDIER ANGEL LOPEZ RINCONОценок пока нет
- Mini Project Report (CLAP SWITCH)Документ22 страницыMini Project Report (CLAP SWITCH)Om Prakash Singh100% (4)
- Leica CME ManualДокумент24 страницыLeica CME ManualMaria DapkeviciusОценок пока нет
- Alternating CurrentДокумент21 страницаAlternating CurrentRudresh SinghОценок пока нет
- Ac Power Analysis DoodleДокумент93 страницыAc Power Analysis DoodlenantespieroОценок пока нет
- Chapter 8Документ48 страницChapter 8hamzaОценок пока нет
- Engineering Electromagnetics Lecture 4 - Chapter 2 Key ConceptsДокумент62 страницыEngineering Electromagnetics Lecture 4 - Chapter 2 Key ConceptsSabit ShaihollaОценок пока нет
- TD3 SolutionДокумент3 страницыTD3 Solutionboulahdour.ayoub.g55Оценок пока нет
- Tutorial 3 PDFДокумент2 страницыTutorial 3 PDFYashodhan JaltareОценок пока нет
- Signals and Waves Part CДокумент69 страницSignals and Waves Part CCyber CityОценок пока нет
- Fundamental Concepts of Electrical Energy SystemsДокумент33 страницыFundamental Concepts of Electrical Energy SystemsLin ChongОценок пока нет
- EE 361 Introduction To Signal Processing: Spring 2021Документ48 страницEE 361 Introduction To Signal Processing: Spring 2021Erhan TombuloğluОценок пока нет
- Appendix A. The DQ TransformationДокумент8 страницAppendix A. The DQ TransformationtiagokjОценок пока нет
- Flywheels QuestionsДокумент3 страницыFlywheels Questionsraghu.entrepreneurОценок пока нет
- Solution Manual For Signals and Systems Continuous and Discrete 4 e 4th Edition Rodger e Ziemer William H Tranter Rolla D R FanninДокумент14 страницSolution Manual For Signals and Systems Continuous and Discrete 4 e 4th Edition Rodger e Ziemer William H Tranter Rolla D R FanninLarry Moore100% (34)
- Et M Zulassungspruefung PDFДокумент5 страницEt M Zulassungspruefung PDFmuhammad bilalОценок пока нет
- Solve Problems in RC Series CircuitsДокумент6 страницSolve Problems in RC Series CircuitsAmer ArtesanoОценок пока нет
- ECE-GATE-2021-February-7-3-PM-converted-1 (3)Документ5 страницECE-GATE-2021-February-7-3-PM-converted-1 (3)2512bindumadhaviОценок пока нет
- Fourier in Circuit ApplicationsДокумент11 страницFourier in Circuit ApplicationsMohammed MaherОценок пока нет
- EC331 M1 SolutionДокумент2 страницыEC331 M1 SolutionBushra MamoudОценок пока нет
- 10 - L-16 (NKD) (Pe) ( (Ee) Nptel)Документ1 страница10 - L-16 (NKD) (Pe) ( (Ee) Nptel)CharkОценок пока нет
- Fourier Series-2 PDFДокумент7 страницFourier Series-2 PDFsightlesswarriorОценок пока нет
- 7 - Chapter 6Документ11 страниц7 - Chapter 6AhmedОценок пока нет
- Electrical Transient AnalysisДокумент17 страницElectrical Transient Analysisdeepshikhasharma230191Оценок пока нет
- Adobe Scan 22-Jun-2023Документ15 страницAdobe Scan 22-Jun-2023Hetal PandyaОценок пока нет
- Analog Mod NotesДокумент50 страницAnalog Mod NotesSmriti Rai M.Tech. Dept. of Electronics Engg. IIT (BHU)Оценок пока нет
- EEE 1 Meeting 8 - Power in AC Circuits PDFДокумент35 страницEEE 1 Meeting 8 - Power in AC Circuits PDFAndrea OnglaoОценок пока нет
- PSDC 29Документ25 страницPSDC 29Dinesh ShettyОценок пока нет
- Ac PhysicsДокумент32 страницыAc PhysicsNarender KumarОценок пока нет
- Thermal Stresses in Thin DiskДокумент2 страницыThermal Stresses in Thin DiskndmiraqОценок пока нет
- Energies: Harmonic Spectrum of Output Voltage For Space Vector Pulse Width Modulated Ultra Sparse Matrix ConverterДокумент13 страницEnergies: Harmonic Spectrum of Output Voltage For Space Vector Pulse Width Modulated Ultra Sparse Matrix ConverterAndréОценок пока нет
- Sample & Practice Tutorial Assignment On UNIT IIДокумент9 страницSample & Practice Tutorial Assignment On UNIT IIFF02 Aniket BarhateОценок пока нет
- Chapter 2-Part 1-Fourier SeriesДокумент35 страницChapter 2-Part 1-Fourier SeriesNorhatini IbrahimОценок пока нет
- CH 02Документ42 страницыCH 02Whats UPОценок пока нет
- S4A Three Phase Circuits Part1Документ54 страницыS4A Three Phase Circuits Part1RamenKing12Оценок пока нет
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsДокумент17 страницWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsChitransh SrivastavaОценок пока нет
- Short Circuit Analysis Lecture Notes PDFДокумент107 страницShort Circuit Analysis Lecture Notes PDFpsychic_jason00713190% (1)
- Differential equation and response of an overdamped second order systemДокумент5 страницDifferential equation and response of an overdamped second order systemabaytekinovicОценок пока нет
- 03 - Seismic Input PDFДокумент31 страница03 - Seismic Input PDFHerman AucampОценок пока нет
- 03 PhasorsДокумент6 страниц03 Phasorsmalani.swastikОценок пока нет
- 1035purl IPC TYS 2023Документ11 страниц1035purl IPC TYS 2023shiv lionОценок пока нет
- Elec 3202 Chap 8Документ50 страницElec 3202 Chap 8Belayneh AbirhamОценок пока нет
- POW1-3C - 041200053 - Assignment 1Документ6 страницPOW1-3C - 041200053 - Assignment 1Ruvenderan SuburamaniamОценок пока нет
- Problemario 2° DepДокумент8 страницProblemario 2° DepDulce GoveaОценок пока нет
- Cmpe 110 Class NotesДокумент69 страницCmpe 110 Class Notesmohankumar58Оценок пока нет
- 13 Electric Motors 101Документ60 страниц13 Electric Motors 101Sairam A J 18MAC0002Оценок пока нет
- Ee 2008Документ47 страницEe 2008Aditya Sankar SenguptaОценок пока нет
- R-L-C AC Circuits: P PP RMS RMS PP RMSДокумент10 страницR-L-C AC Circuits: P PP RMS RMS PP RMShiren_powerОценок пока нет
- Lecture 2.1Документ16 страницLecture 2.1Đông Huy BạchОценок пока нет
- Torque - Slip Characteristic of A Three - Phase Induction MachineДокумент28 страницTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirОценок пока нет
- POTD 269: 1 ProblemДокумент4 страницыPOTD 269: 1 ProblemObama binladen100% (1)
- Lecture 2Документ59 страницLecture 2필립Оценок пока нет
- Chapter 11: Radiation: 11.1 Dipole Radiation 11.1.1 What Is Radiation? 11.1.2 Electric Dipole RadiationДокумент4 страницыChapter 11: Radiation: 11.1 Dipole Radiation 11.1.1 What Is Radiation? 11.1.2 Electric Dipole RadiationMadhumika ThammaliОценок пока нет
- June AnsДокумент5 страницJune AnsMomo UniverseОценок пока нет
- EEE211 Assignment 1Документ5 страницEEE211 Assignment 1Samina TohfaОценок пока нет
- BEE4223 Power Electronics & Drives SystemsДокумент40 страницBEE4223 Power Electronics & Drives Systemsmalathynarayani100% (1)
- Module 2 (AC Circuit)Документ23 страницыModule 2 (AC Circuit)Sattwik MannaОценок пока нет
- Tutorial - Fourier Series Eet206 - Electric Circuit IiДокумент3 страницыTutorial - Fourier Series Eet206 - Electric Circuit IiAvro AronnoОценок пока нет
- Sem 2 1617 - Test 1Документ4 страницыSem 2 1617 - Test 1Davidz GanОценок пока нет
- Review of Chapter 2 Matlab Examples (Part IIДокумент7 страницReview of Chapter 2 Matlab Examples (Part IIkaren dejoОценок пока нет
- Rectifier ProblemsДокумент5 страницRectifier ProblemsBea DucaoОценок пока нет
- Principles of Urban Structure in SocialДокумент7 страницPrinciples of Urban Structure in SocialBea DucaoОценок пока нет
- MicroPMU Data Sheet 3.0Документ2 страницыMicroPMU Data Sheet 3.0Bea DucaoОценок пока нет
- EE 143 Synchronous Machine ProblemsДокумент3 страницыEE 143 Synchronous Machine ProblemsBea DucaoОценок пока нет
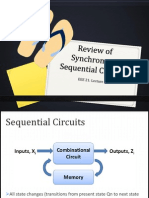
- Sequential Circuits: Analysis, Minimization MethodsДокумент5 страницSequential Circuits: Analysis, Minimization MethodsBea DucaoОценок пока нет
- Introduction To Z-TransformДокумент15 страницIntroduction To Z-TransformZainab84Оценок пока нет
- Homework 20160712224505321Документ4 страницыHomework 20160712224505321Bea DucaoОценок пока нет
- DOST-SEI Junior Scholarship Application FormsДокумент4 страницыDOST-SEI Junior Scholarship Application FormsAbigail SaballeОценок пока нет
- One Sided Z Transform PDFДокумент10 страницOne Sided Z Transform PDFBea DucaoОценок пока нет
- EEE 23 Homework - DC Circuits by Student NumberДокумент1 страницаEEE 23 Homework - DC Circuits by Student NumberBea DucaoОценок пока нет
- ReviewДокумент30 страницReviewBea DucaoОценок пока нет
- One Sided Z Transform PDFДокумент10 страницOne Sided Z Transform PDFBea DucaoОценок пока нет
- Introduction To Z-TransformДокумент15 страницIntroduction To Z-TransformZainab84Оценок пока нет
- DC2-4 Decoder MuxДокумент15 страницDC2-4 Decoder MuxBea DucaoОценок пока нет
- AC SinAnalysis Prac Probs Solutions 1 58Документ3 страницыAC SinAnalysis Prac Probs Solutions 1 58Bea DucaoОценок пока нет
- L5 RLC CircuitsДокумент12 страницL5 RLC CircuitsArvinthran Thennarayasu KrishnanОценок пока нет
- Highschool SummertimeДокумент233 страницыHighschool SummertimeBea DucaoОценок пока нет
- AC Analysis of RLC Circuits Using OscilloscopeДокумент4 страницыAC Analysis of RLC Circuits Using OscilloscopeBea DucaoОценок пока нет
- Math 54 Exam 5 ReviewДокумент16 страницMath 54 Exam 5 ReviewBea DucaoОценок пока нет
- Math 54 Exam 4 ReviewДокумент16 страницMath 54 Exam 4 ReviewBea DucaoОценок пока нет
- Math 54 Exam 4 ReviewДокумент16 страницMath 54 Exam 4 ReviewBea DucaoОценок пока нет
- 3D Geometry Sample QuestionsДокумент54 страницы3D Geometry Sample QuestionsBea DucaoОценок пока нет
- Math 54 Exam 2 ReviewДокумент11 страницMath 54 Exam 2 ReviewBea DucaoОценок пока нет
- Final ProbsetДокумент3 страницыFinal ProbsetBea DucaoОценок пока нет
- Math 54 Exam 1 ReviewДокумент9 страницMath 54 Exam 1 ReviewBea DucaoОценок пока нет
- Is.10919.1984 ESP StandardДокумент6 страницIs.10919.1984 ESP StandardhbookОценок пока нет
- 10.8 Special Polar GraphsДокумент16 страниц10.8 Special Polar GraphsIlias NihaОценок пока нет
- Sabp G 007Документ8 страницSabp G 007Li PengОценок пока нет
- DocДокумент6 страницDocapi-287506055Оценок пока нет
- ParkerДокумент106 страницParkerJoseJSanchezОценок пока нет
- Software Test MetricsДокумент8 страницSoftware Test MetricscmarrivadaОценок пока нет
- Training Seminar ON GSM Held at BSNL: Presented By: Charli Bagga Kriti Rastogi (AEI-08)Документ51 страницаTraining Seminar ON GSM Held at BSNL: Presented By: Charli Bagga Kriti Rastogi (AEI-08)Ankita BharadwajОценок пока нет
- Ivy Bridge PDFДокумент25 страницIvy Bridge PDFDương Tấn QuốcОценок пока нет
- Chapter 5 Refraction Through A Lens - Concise Physics Part II - Selina Solutions For Class 10 Physics ICSE - TopperLearningДокумент71 страницаChapter 5 Refraction Through A Lens - Concise Physics Part II - Selina Solutions For Class 10 Physics ICSE - TopperLearningHarsh AhirwarОценок пока нет
- QST HamClockДокумент3 страницыQST HamClockCPC PHCОценок пока нет
- Network Termination Unit STU4: Suppor Ting SHDSL - BisДокумент2 страницыNetwork Termination Unit STU4: Suppor Ting SHDSL - BisНатальяОценок пока нет
- D.Abbas M AlkebsiДокумент40 страницD.Abbas M AlkebsiruchikaОценок пока нет
- Leviton ManualДокумент82 страницыLeviton ManualRobby Larson100% (1)
- GR/KWH, KG/HR or Tons/Month.: ScopeДокумент5 страницGR/KWH, KG/HR or Tons/Month.: ScopeThaigroup CementОценок пока нет
- Microsoft Office Tips and TricksДокумент12 страницMicrosoft Office Tips and TricksJayr BVОценок пока нет
- Rational Expectation TheoryДокумент7 страницRational Expectation TheoryIsmith PokhrelОценок пока нет
- CH3 SolutionsДокумент40 страницCH3 SolutionsRonelОценок пока нет
- Inductance Calculations Working Formulas and Tables (Grover-1973)Документ153 страницыInductance Calculations Working Formulas and Tables (Grover-1973)Anonymous 2OxpGvaNW100% (1)
- Friction Clutches 2020 CompressedДокумент14 страницFriction Clutches 2020 Compressedfikadu435Оценок пока нет
- Probset 8Документ7 страницProbset 8Adrian PamintuanОценок пока нет
- Shape and angle detective game for kidsДокумент21 страницаShape and angle detective game for kidsbemusaОценок пока нет
- Manulife VRV System Selection for Philippines OfficeДокумент7 страницManulife VRV System Selection for Philippines Officelucio ruiz jrОценок пока нет
- AFM13 Preface Solutions ManualДокумент5 страницAFM13 Preface Solutions ManualArshad33% (3)
- ST RDДокумент2 страницыST RDBalteshwar SinghОценок пока нет