Вам также может понравиться
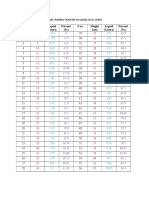
- S No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)Документ2 страницыS No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)FayazKhanPathanОценок пока нет
- Emily Dickinson To Susan GilbertДокумент1 страницаEmily Dickinson To Susan GilbertFayazKhanPathanОценок пока нет
- Angle Between SubspacesДокумент7 страницAngle Between SubspacesFayazKhanPathanОценок пока нет
- CHEP Hospitol ProcedureДокумент2 страницыCHEP Hospitol ProcedureFayazKhanPathanОценок пока нет
- The 44 Phonemes of English Chart PDFДокумент4 страницыThe 44 Phonemes of English Chart PDFArun Prasath100% (2)
- Discrete PID Controller: For Use in Robotics Project #3Документ10 страницDiscrete PID Controller: For Use in Robotics Project #3FayazKhanPathanОценок пока нет
- Gardner ThesisДокумент128 страницGardner ThesisFayazKhanPathanОценок пока нет
- Matlab Fuzzy Toolbox TutorialДокумент42 страницыMatlab Fuzzy Toolbox TutorialFayazKhanPathanОценок пока нет
- Bode Stability CriterionДокумент1 страницаBode Stability CriterionFayazKhanPathanОценок пока нет
- Raspberry Gpio: Available Online atДокумент25 страницRaspberry Gpio: Available Online atFayazKhanPathanОценок пока нет
- Singular Value Decomposition - MIT PDFДокумент5 страницSingular Value Decomposition - MIT PDFFayazKhanPathanОценок пока нет
- Solving The Radial Part of The Laplacian Equation Using The Method of FrobeniusДокумент1 страницаSolving The Radial Part of The Laplacian Equation Using The Method of FrobeniusFayazKhanPathanОценок пока нет
- Taulu JAP 05Документ10 страницTaulu JAP 05FayazKhanPathanОценок пока нет
- EulerДокумент2 страницыEulerFayazKhanPathanОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Tos Grade 10Документ1 страницаTos Grade 10Zechnas Ma Ria LouОценок пока нет
- Part I: Multiple Choice: Physisc 82 - 1 Semester AY '16 - 17Документ4 страницыPart I: Multiple Choice: Physisc 82 - 1 Semester AY '16 - 17deusleanОценок пока нет
- For ECT & ECE Board ExamДокумент60 страницFor ECT & ECE Board ExamRalph Alvin Quizon100% (2)
- PHYS 2350 Example Problems Winter 2020Документ2 страницыPHYS 2350 Example Problems Winter 2020Joy KimОценок пока нет
- Application of Electrical Resistivity Method in Sodium Sulfate Deposits Exploration, Case Study: Garmab, IranДокумент9 страницApplication of Electrical Resistivity Method in Sodium Sulfate Deposits Exploration, Case Study: Garmab, IranInternational Network For Natural SciencesОценок пока нет
- Visualising Magnetic FieldsДокумент171 страницаVisualising Magnetic FieldshieudtqnОценок пока нет
- Helmholtz Free Energy PDFДокумент6 страницHelmholtz Free Energy PDFDuà Zàhrä RìzvîОценок пока нет
- Assignment 1 Solution (Doctor) PDFДокумент14 страницAssignment 1 Solution (Doctor) PDFAhmed KhairiОценок пока нет
- Duncan-Chang Hyperbolic ModelДокумент5 страницDuncan-Chang Hyperbolic ModelAntariksa Prianggara100% (2)
- Policies For PDF ContentДокумент3 страницыPolicies For PDF Contentvijay123inОценок пока нет
- CHM510 - SpeДокумент7 страницCHM510 - SpeafifiОценок пока нет
- Utkarsh ChromatographyДокумент17 страницUtkarsh ChromatographyUtkarsh Pratap SinghОценок пока нет
- Calculation of Natural Frequency of Earth Dams by Means of AnalytДокумент7 страницCalculation of Natural Frequency of Earth Dams by Means of AnalytNathan VincentОценок пока нет
- 4 Vector Slide PDFДокумент27 страниц4 Vector Slide PDFNasibhaОценок пока нет
- Make An Analemmatic SundialДокумент3 страницыMake An Analemmatic SundialjoaojsОценок пока нет
- Ap Physics 1investigation4conservationofenergy PDFДокумент17 страницAp Physics 1investigation4conservationofenergy PDFMir'atun Nissa QuinalendraОценок пока нет
- Resistance Vs Temperature Experiment Lab ReportДокумент7 страницResistance Vs Temperature Experiment Lab ReportEmily Gatlin67% (3)
- Cathedrals of Science - The Personalities and Rivalries That Made Modern ChemistryДокумент400 страницCathedrals of Science - The Personalities and Rivalries That Made Modern ChemistryPushkar Pandit100% (1)
- CP 2Документ1 страницаCP 2shameer bashaОценок пока нет
- Effect of Corrugation Angle On Performance Evaluation of Plate Type Heat ExchangerДокумент6 страницEffect of Corrugation Angle On Performance Evaluation of Plate Type Heat ExchangerZaw Htet WinОценок пока нет
- Chemistry MSCДокумент17 страницChemistry MSCRajesh ShahiОценок пока нет
- Vfd-E: Parameter ManualДокумент26 страницVfd-E: Parameter ManualMohamed ElsayedОценок пока нет
- Equilibrium Powerpoint Physics 12 LectureДокумент25 страницEquilibrium Powerpoint Physics 12 LectureQueenielyn TagraОценок пока нет
- High Power CycloconverterДокумент7 страницHigh Power Cycloconverternapster26Оценок пока нет
- Mathcad - Trinity Bearing Capacity - MDKДокумент5 страницMathcad - Trinity Bearing Capacity - MDKjcazОценок пока нет
- USGS Design Maps Summary Report Universal Hollywood Site Class CДокумент7 страницUSGS Design Maps Summary Report Universal Hollywood Site Class CDan Dela Peña0% (1)
- 13 Structural LoosenessДокумент1 страница13 Structural LoosenessmtttusharОценок пока нет
- Muhammad Sahimi Heterogeneous Materials I LineaДокумент793 страницыMuhammad Sahimi Heterogeneous Materials I LineadashatanliОценок пока нет
- Handwheel To Road Wheel 730039V001Документ79 страницHandwheel To Road Wheel 730039V001Dinesh Maheshwari100% (1)
- Celesta Ire 2012 CatalogДокумент96 страницCelesta Ire 2012 Catalogjsom1021Оценок пока нет