Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Li-Fi (Light Fidelity) The Future Technology in Wireless CommunicationДокумент10 страницLi-Fi (Light Fidelity) The Future Technology in Wireless CommunicationrkОценок пока нет
- Interrupts/Polling and Input/Output With The DSK Codec: Pre-LabДокумент4 страницыInterrupts/Polling and Input/Output With The DSK Codec: Pre-LabrkОценок пока нет
- Dspa Lab ManualДокумент49 страницDspa Lab ManualrkОценок пока нет
- Physics Electrostatic Potential CapacitanceДокумент14 страницPhysics Electrostatic Potential CapacitancerkОценок пока нет
- Automation Technology AppNote Matlab Image Acquisition ToolboxДокумент15 страницAutomation Technology AppNote Matlab Image Acquisition ToolboxrkОценок пока нет
- General Linear Model & Classical Inference: London, SPM-M/EEG CourseДокумент24 страницыGeneral Linear Model & Classical Inference: London, SPM-M/EEG CourserkОценок пока нет
- DSP LAB - IntroductionДокумент29 страницDSP LAB - IntroductionrkОценок пока нет
- Teach Yourself Advanced C in 21 Days (Sams-1994)Документ904 страницыTeach Yourself Advanced C in 21 Days (Sams-1994)rkОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- People Soft Bundle Release Note 9 Bundle9Документ29 страницPeople Soft Bundle Release Note 9 Bundle9rajiv_xguysОценок пока нет
- Griet DSP ProgramsДокумент14 страницGriet DSP ProgramsJaipaul CheernamОценок пока нет
- Manual Aspire 5551Документ210 страницManual Aspire 5551Arnaud NetoОценок пока нет
- Production ManagementДокумент81 страницаProduction ManagementrrathoreОценок пока нет
- Bomba de Vácuo Sotorbilt 4mrДокумент12 страницBomba de Vácuo Sotorbilt 4mrWormInchОценок пока нет
- Unit 01 AssignmentДокумент12 страницUnit 01 Assignmentvipul unagarОценок пока нет
- Lesson1. TriangulationДокумент21 страницаLesson1. TriangulationTristania Leighan DeypuyartОценок пока нет
- DP Chipset 15045 DriversДокумент592 страницыDP Chipset 15045 DriversRajesh1146Оценок пока нет
- Mitsubishi 4g13 Engine ManualДокумент6 страницMitsubishi 4g13 Engine ManualJose Luis Caceres Severino100% (1)
- Seismic Force CANADA Code - CNBC2005-V421Документ7 страницSeismic Force CANADA Code - CNBC2005-V421Niko NištićОценок пока нет
- Nitrogen Purge Manifold For C2H2Документ3 страницыNitrogen Purge Manifold For C2H2Abdullah FazilОценок пока нет
- On The Gaussian Error Function (1935) : Robert J. KolkerДокумент4 страницыOn The Gaussian Error Function (1935) : Robert J. KolkerSanthosh KulandaiyanОценок пока нет
- Dimitrios Iliadelis - Effect of Deep Excavation On An Adjacent Pile FoundationДокумент77 страницDimitrios Iliadelis - Effect of Deep Excavation On An Adjacent Pile Foundationmateus456Оценок пока нет
- ProjectДокумент34 страницыProjectSarvajeet Kshirsagar100% (1)
- 462116-01 AA - 1510 Excel ESI Command Codes Addendum - 10 Feb 2009Документ103 страницы462116-01 AA - 1510 Excel ESI Command Codes Addendum - 10 Feb 2009quyenducqdc100% (1)
- Manufacturing Layout Analysis - Comparing Flexsim With Excel SpreadsheetsДокумент2 страницыManufacturing Layout Analysis - Comparing Flexsim With Excel Spreadsheetsmano7428Оценок пока нет
- Dataproducts - LZR 1260 Laser Printer (1989)Документ6 страницDataproducts - LZR 1260 Laser Printer (1989)Bobby ChippingОценок пока нет
- ASTM D287-92 (Metodo de Prueba Estandar para Gravedad API de Petroleo Crudo y Productos Del Petroleo Metodo Del Hidrómetro)Документ3 страницыASTM D287-92 (Metodo de Prueba Estandar para Gravedad API de Petroleo Crudo y Productos Del Petroleo Metodo Del Hidrómetro)Juan MonjeОценок пока нет
- IA SeriesДокумент20 страницIA Seriessina20795Оценок пока нет
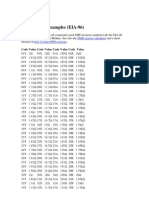
- SMD Resistor ExamplesДокумент5 страницSMD Resistor Examplesmarcbuss100% (1)
- WinDNC - V05 - 02 English PDFДокумент2 страницыWinDNC - V05 - 02 English PDFAnonymous XXKCjKnc0Оценок пока нет
- Aerospace MaterialsДокумент68 страницAerospace MaterialsAykut Üçtepe100% (1)
- D-Link DI-524 ManualДокумент92 страницыD-Link DI-524 ManualhadzicinetОценок пока нет
- First-Man-Up User ManualДокумент24 страницыFirst-Man-Up User ManualJoshuaОценок пока нет
- Presented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenДокумент34 страницыPresented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenSyed Ahmed AliОценок пока нет
- Variable Displacements Axial Piston Pumps: Edition: 06/06.2020 Replaces: MVP 05 T AДокумент72 страницыVariable Displacements Axial Piston Pumps: Edition: 06/06.2020 Replaces: MVP 05 T ARidha AbbassiОценок пока нет
- HEKO Products and Services: Elements For Bucket ElevatorsДокумент36 страницHEKO Products and Services: Elements For Bucket ElevatorsShariq KhanОценок пока нет
- 17 Free Data Science Projects To Boost Your Knowledge & SkillsДокумент18 страниц17 Free Data Science Projects To Boost Your Knowledge & SkillshamedfazelmОценок пока нет
- EST 2011B v1.0 Configuration 10/28/2018 7:43 AMДокумент2 страницыEST 2011B v1.0 Configuration 10/28/2018 7:43 AMbagusОценок пока нет
- Ceramic Materials: Introduction!: MCEN90014: Materials ! ! !dr. K. Xia! ! ! !1!Документ5 страницCeramic Materials: Introduction!: MCEN90014: Materials ! ! !dr. K. Xia! ! ! !1!hamalОценок пока нет