Вам также может понравиться
- Spur Gear DesignДокумент4 страницыSpur Gear DesignKB MambaОценок пока нет
- Spur Gear Design Learn EngineeringДокумент4 страницыSpur Gear Design Learn EngineeringImran Sajid ShahidОценок пока нет
- An Algorithm For Robust Gear Modifications DesignДокумент16 страницAn Algorithm For Robust Gear Modifications DesignAbhijeet DeshmukhОценок пока нет
- CH 14Документ13 страницCH 14mssaber77Оценок пока нет
- High Speed Gears-Design and Application by James R. PartridgeДокумент10 страницHigh Speed Gears-Design and Application by James R. PartridgeAbbasAnsariОценок пока нет
- Gear Geometry For Reduced and Robust Transmission Error and Gearbox NoiseДокумент21 страницаGear Geometry For Reduced and Robust Transmission Error and Gearbox Noiseranim najibОценок пока нет
- Application and Improvement of Face Load Factor Determination Based On Agma 927Документ19 страницApplication and Improvement of Face Load Factor Determination Based On Agma 927Nursena SEVİNÇОценок пока нет
- Connecting Rod DesignДокумент8 страницConnecting Rod DesignchandrasmgОценок пока нет
- The 2D Tyre Modelling conundrum and how setup referencing can improve sensitivityДокумент10 страницThe 2D Tyre Modelling conundrum and how setup referencing can improve sensitivitybanabanaОценок пока нет
- Analysis and Synthesis of Geneva MechanismsДокумент12 страницAnalysis and Synthesis of Geneva MechanismsAmthe ManОценок пока нет
- Shock Speed ArticleДокумент10 страницShock Speed ArticleKathryn Workman100% (1)
- Introduction To Direct Gear DesignДокумент15 страницIntroduction To Direct Gear DesignburaktuncerОценок пока нет
- SpurДокумент57 страницSpurDangol RupeshОценок пока нет
- Guide To Dyno GraphsДокумент10 страницGuide To Dyno GraphsRajaSekarsajjaОценок пока нет
- Path of Contact CalculationДокумент6 страницPath of Contact Calculationroberto_perraciniОценок пока нет
- Planetary Gear SystemДокумент11 страницPlanetary Gear SystemNikhil NairОценок пока нет
- Ijmet 07 05 023Документ12 страницIjmet 07 05 023SANDEEP BUDANIAОценок пока нет
- ME 3227 Shaft ProjectДокумент31 страницаME 3227 Shaft ProjectNeel NadparaОценок пока нет
- Long Addendum Gears 1946Документ15 страницLong Addendum Gears 1946Marco ViniciusОценок пока нет
- Shaft Design ProjectДокумент14 страницShaft Design Projectjwm6085% (13)
- Design and Analysis of Spur Gear Using AGMA StandardsДокумент74 страницыDesign and Analysis of Spur Gear Using AGMA StandardsMuhammad Zohaib AliОценок пока нет
- MECH3403 Assignment 1 Report FINALДокумент16 страницMECH3403 Assignment 1 Report FINALCong Thanh LeОценок пока нет
- Lecture #10 Types of Belts and Belt Selection: Course Name: Design of Machine Elements Course Number: MET 214Документ22 страницыLecture #10 Types of Belts and Belt Selection: Course Name: Design of Machine Elements Course Number: MET 214Anup M UpadhyayaОценок пока нет
- Ana 004Документ9 страницAna 004suna06m6403Оценок пока нет
- Torque Vs Tension Interpretation Instructions Rev 6Документ25 страницTorque Vs Tension Interpretation Instructions Rev 6Kurt Kandora MontroneОценок пока нет
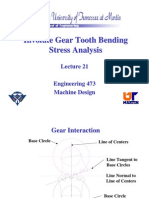
- Involute Gear Tooth Bending Stress AnalysisДокумент24 страницыInvolute Gear Tooth Bending Stress AnalysisVeerasamy SureshbabuОценок пока нет
- Contact Stress Analysis of Barrel Coupling Using FEAДокумент8 страницContact Stress Analysis of Barrel Coupling Using FEABruno SantosОценок пока нет
- Mechanical Testing: Common Modes of Gear FailureДокумент17 страницMechanical Testing: Common Modes of Gear FailureTheerayootОценок пока нет
- Shaft Design and Flywheel DimensioningДокумент13 страницShaft Design and Flywheel DimensioningihtishamuddОценок пока нет
- Bevel Gear PaperДокумент6 страницBevel Gear PaperIsmail IbrahimОценок пока нет
- Isma2012 0731Документ12 страницIsma2012 0731ranim najibОценок пока нет
- Bicycle WheelДокумент19 страницBicycle Wheelnikhil5811100% (1)
- Chapter 9 Spur Gear DesignДокумент31 страницаChapter 9 Spur Gear DesignRamesh Martha100% (1)
- Influence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationДокумент7 страницInfluence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationsamanaveenОценок пока нет
- The Effects of Addendum Modification Coefficient On Tooth Stresses of Spur GearДокумент8 страницThe Effects of Addendum Modification Coefficient On Tooth Stresses of Spur GearSezgin BayrakОценок пока нет
- Thin Rims For Internal GearsДокумент8 страницThin Rims For Internal GearsMass Giovani100% (1)
- Motor Sizing Basics Part 1-4Документ37 страницMotor Sizing Basics Part 1-4M A JomahОценок пока нет
- The Design of Formula SAE Half Shafts For Optimum Vehicle AccelerationДокумент8 страницThe Design of Formula SAE Half Shafts For Optimum Vehicle AccelerationRitwik DasОценок пока нет
- Belt Conveyor Pulley DesignДокумент11 страницBelt Conveyor Pulley Designthakur_raghab100% (1)
- Design of Belt DriveДокумент14 страницDesign of Belt Driveدنيا قيس كاظمОценок пока нет
- Dynamic Load Analysis and Optimization of A Fracture-Split Connecting RodДокумент11 страницDynamic Load Analysis and Optimization of A Fracture-Split Connecting RodRahul BadgujarОценок пока нет
- Design of GearsДокумент62 страницыDesign of Gearsصبا رياض فتاح الرفاعيОценок пока нет
- Gatesfacts™ Technical Information Library: Synchronous and V-Belt Drive Tensioning Pa NoteДокумент2 страницыGatesfacts™ Technical Information Library: Synchronous and V-Belt Drive Tensioning Pa NoteYan's Senora BescoroОценок пока нет
- 14 - CH - 06 Friction and Wear Analysis For BushingДокумент18 страниц14 - CH - 06 Friction and Wear Analysis For BushingSathish KumarОценок пока нет
- Design Analysis of Spur Gear With The Usage of The Advanced ComputerДокумент6 страницDesign Analysis of Spur Gear With The Usage of The Advanced ComputerMohammed JimmyОценок пока нет
- Traction in ElevatorsДокумент3 страницыTraction in ElevatorsПавле Крстевски100% (1)
- ReportДокумент4 страницыReportapi-281270665Оценок пока нет
- Final MemoДокумент9 страницFinal Memoapi-461820735Оценок пока нет
- Adapt PT Tutorial Beam FrameДокумент22 страницыAdapt PT Tutorial Beam FrameHai NguyenОценок пока нет
- Face Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannДокумент8 страницFace Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannosaniamecОценок пока нет
- How Unbalance Affects Bearing LifeДокумент8 страницHow Unbalance Affects Bearing Lifeagrocel_bhv5591Оценок пока нет
- Effect of Geometrical Imperfections of Gears in Large Offshore Wind Turbine Gear Trains Case StudiesДокумент10 страницEffect of Geometrical Imperfections of Gears in Large Offshore Wind Turbine Gear Trains Case StudiesFatho JamylОценок пока нет
- Design UprightДокумент5 страницDesign UprightJohn HopkinsОценок пока нет
- A Calculation of Piston Rod Strength - Bennet, M.CДокумент12 страницA Calculation of Piston Rod Strength - Bennet, M.CLeandro FabrisОценок пока нет
- Course Activity Sample ReportДокумент10 страницCourse Activity Sample ReporthimanshuОценок пока нет
- Certified Solidworks Professional Advanced Sheet Metal Exam PreparationОт EverandCertified Solidworks Professional Advanced Sheet Metal Exam PreparationРейтинг: 5 из 5 звезд5/5 (4)
- Planar Linkage Synthesis: A modern CAD based approachОт EverandPlanar Linkage Synthesis: A modern CAD based approachОценок пока нет
- Chevy Differentials: How to Rebuild the 10- and 12-BoltОт EverandChevy Differentials: How to Rebuild the 10- and 12-BoltРейтинг: 5 из 5 звезд5/5 (8)
- ME GATE 2016 Set 22Документ33 страницыME GATE 2016 Set 22Devaraj DevuОценок пока нет
- VVNBVNДокумент1 страницаVVNBVNANILОценок пока нет
- Prototype: Build Review Refine & IterateДокумент7 страницPrototype: Build Review Refine & IterateANILОценок пока нет
- MCДокумент4 страницыMCViral PatelОценок пока нет
- L9 Nominal Taguchi 1Документ38 страницL9 Nominal Taguchi 1ANILОценок пока нет
- VVNBVNДокумент5 страницVVNBVNANILОценок пока нет
- WordlistДокумент1 страницаWordlistANILОценок пока нет
- Word ListДокумент1 страницаWord ListANILОценок пока нет
- Name: Nilesh Ashok Wagh Mobile No.: +91 7588930595/7020322853 Technical AchievementsДокумент2 страницыName: Nilesh Ashok Wagh Mobile No.: +91 7588930595/7020322853 Technical AchievementsANILОценок пока нет
- My Statement of PurposeДокумент1 страницаMy Statement of PurposeANILОценок пока нет
- OceaneeringДокумент1 страницаOceaneeringANILОценок пока нет
- GRE Essay TipsДокумент1 страницаGRE Essay TipsANILОценок пока нет
- Ghalib... (In Hindi)Документ36 страницGhalib... (In Hindi)api-19771339Оценок пока нет
- Patent Filing ProcedureДокумент34 страницыPatent Filing ProcedureANILОценок пока нет
- Season Classification Chart 2017: Alleppey Munnar Coorg Binsar Kanatal Shimla Kanha JaipurДокумент2 страницыSeason Classification Chart 2017: Alleppey Munnar Coorg Binsar Kanatal Shimla Kanha JaipurANILОценок пока нет
- VW CS 0412 PDFДокумент4 страницыVW CS 0412 PDFANILОценок пока нет
- Malleable Cast Iron Heat TreatmentДокумент1 страницаMalleable Cast Iron Heat TreatmentANILОценок пока нет
- 34 NCMCДокумент5 страниц34 NCMCANILОценок пока нет
- Courses Welingkaronline Org Newlogin Subjectlist PortionДокумент1 страницаCourses Welingkaronline Org Newlogin Subjectlist PortionANILОценок пока нет
- Cryogenic RefrigerationДокумент7 страницCryogenic RefrigerationANILОценок пока нет
- What Is Your Actual Pump Flow Rate?: Norman F. Perkins, P.E. Philip S. StacyДокумент10 страницWhat Is Your Actual Pump Flow Rate?: Norman F. Perkins, P.E. Philip S. StacyANILОценок пока нет
- Eflv 005Документ1 страницаEflv 005ANILОценок пока нет
- PV Elite Heat Exchanger CalculationsДокумент99 страницPV Elite Heat Exchanger CalculationscbousmuОценок пока нет
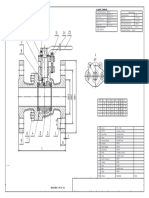
- ASM E B16.34 Valve Body W All Thickness ASM E B16.10 Api 6D Design & M AnufacturingДокумент1 страницаASM E B16.34 Valve Body W All Thickness ASM E B16.10 Api 6D Design & M AnufacturingANILОценок пока нет
- BS en 1092Документ21 страницаBS en 1092Pranay Kharbe100% (5)
- Refrigeration and Airconditioning by S K Mondal T&Q .0001Документ133 страницыRefrigeration and Airconditioning by S K Mondal T&Q .0001ANILОценок пока нет
- Body Language For InterviewДокумент5 страницBody Language For InterviewANILОценок пока нет
- Eflv 005Документ1 страницаEflv 005ANILОценок пока нет
- Club Mahindra Goa Varca Beach FactSheetДокумент2 страницыClub Mahindra Goa Varca Beach FactSheetshrinidhik@gmailcomОценок пока нет
- GD & T Stack Up Analysis PDFДокумент12 страницGD & T Stack Up Analysis PDFANILОценок пока нет
- Shear Link Modeling PushoverДокумент79 страницShear Link Modeling PushoverHaluk SesigürОценок пока нет
- Design of Steel Storage Tank with Self-Supported Cone RoofДокумент29 страницDesign of Steel Storage Tank with Self-Supported Cone RoofJoeОценок пока нет
- SGB Formwork ManualДокумент110 страницSGB Formwork ManualSatria Aditya25% (4)
- Casa Da MusicaДокумент3 страницыCasa Da Musica1219440Оценок пока нет
- IS 456 Fig 4: y S T Req. T Prov. T 2 2Документ23 страницыIS 456 Fig 4: y S T Req. T Prov. T 2 2Rahul Aggarwal100% (1)
- 3 2 4 A BeamanalysisshortcutstkДокумент8 страниц3 2 4 A Beamanalysisshortcutstkapi-272705534100% (1)
- Isolated Footing 73Документ21 страницаIsolated Footing 73Ritz Anne Chan TanОценок пока нет
- Design Model For Bolted Moment End Plate With RhsДокумент63 страницыDesign Model For Bolted Moment End Plate With Rhsfirter100% (1)
- Chapter b04 Stress Analysis of Piping System PDFДокумент108 страницChapter b04 Stress Analysis of Piping System PDFrogel_ganaОценок пока нет
- Pages from CSA A23 (1) .3-04 - 加拿大标准协会 Design of Concrete Structures-5Документ1 страницаPages from CSA A23 (1) .3-04 - 加拿大标准协会 Design of Concrete Structures-5Babrak Khan NoorzoiОценок пока нет
- 305W Structure LabReport Template Me1Документ25 страниц305W Structure LabReport Template Me1slp5113100% (1)
- RC-SEOДокумент200 страницRC-SEOMeverlyn RoqueroОценок пока нет
- DNV CG 0133 PDFДокумент78 страницDNV CG 0133 PDFCheok CHОценок пока нет
- 05 04chapgereДокумент12 страниц05 04chapgereRodolfo David Avila BarrancoОценок пока нет
- Silt Gravel Removal GateДокумент16 страницSilt Gravel Removal GateRaja SinghОценок пока нет
- Vulnerability assessment of reinforced concrete columns subjected to vehicular impactsДокумент274 страницыVulnerability assessment of reinforced concrete columns subjected to vehicular impactsfoush bashaОценок пока нет
- CraneДокумент36 страницCraneGautam Paul100% (2)
- bs8110 Part 2Документ44 страницыbs8110 Part 2ganesh raja m67% (3)
- NSC1907-Member Buckling With Tension Flange RestraintДокумент3 страницыNSC1907-Member Buckling With Tension Flange Restraintpatricklim1982Оценок пока нет
- Arthur W. Leissa (Auth.), I. H. Marshall (Eds.) - Composite Structures 4 - Volume 1 Analysis and Design Studies (1987, Springer Netherlands)Документ647 страницArthur W. Leissa (Auth.), I. H. Marshall (Eds.) - Composite Structures 4 - Volume 1 Analysis and Design Studies (1987, Springer Netherlands)Shivareddy KondakindiОценок пока нет
- Mechanics of Materials IntroductionДокумент29 страницMechanics of Materials IntroductionengrrrrОценок пока нет
- Bearings Book PDFДокумент96 страницBearings Book PDFdarealboyОценок пока нет
- Tribedi, Apurba - Datta, Anirban - Practical Foundation Design With STAAD Foundation Advanced (2018, Bentley Institute Press) - Libgen - Li PDFДокумент386 страницTribedi, Apurba - Datta, Anirban - Practical Foundation Design With STAAD Foundation Advanced (2018, Bentley Institute Press) - Libgen - Li PDFAgung Dwi NugrohoОценок пока нет
- Master Thesis MP FelicitaДокумент112 страницMaster Thesis MP FelicitaHoàng LongОценок пока нет
- Btech Ce 2021Документ135 страницBtech Ce 2021sunny sauravОценок пока нет
- Difference between WSM & LSM methodsДокумент1 страницаDifference between WSM & LSM methodsPurvanchal Institute of Architecture & DesignОценок пока нет
- Motion of A Tumour Cell Under The Blood Flow at Low Reynolds Number in A Curved MicrovesselДокумент10 страницMotion of A Tumour Cell Under The Blood Flow at Low Reynolds Number in A Curved MicrovesselJuana Valentina CamachoОценок пока нет
- Eng TipsДокумент5 страницEng TipsBenedictus MurdonoОценок пока нет
- Slope Deflection MethodДокумент19 страницSlope Deflection MethodRajasekharan NairОценок пока нет
- Solid Mechanics SyllabusДокумент2 страницыSolid Mechanics SyllabusSurjit Kumar GandhiОценок пока нет