Вам также может понравиться
- Determining Settings For Capacitor Bank Protection2columnДокумент9 страницDetermining Settings For Capacitor Bank Protection2columnvksharma13Оценок пока нет
- Siemens Power Engineering Guide 7E 328Документ1 страницаSiemens Power Engineering Guide 7E 328mydearteacherОценок пока нет
- Numerical Diff - PresentationДокумент42 страницыNumerical Diff - PresentationNeelakandan MasilamaniОценок пока нет
- 7.0 Synchroscope ManualДокумент3 страницы7.0 Synchroscope ManualAyan MajiОценок пока нет
- Digsi 5 Quick Notes DIGSI-5-QN0009: SIPROTEC 5 - DIGSI 5 Connection Via EthernetДокумент2 страницыDigsi 5 Quick Notes DIGSI-5-QN0009: SIPROTEC 5 - DIGSI 5 Connection Via EthernetMichael Parohinog GregasОценок пока нет
- Automatic Distance Relay PDFДокумент4 страницыAutomatic Distance Relay PDFOmar Chayña VelásquezОценок пока нет
- Analysis of Oscillograms (v6.0)Документ21 страницаAnalysis of Oscillograms (v6.0)luhusapaОценок пока нет
- Digsi 5 Quick Notes DIGSI-5-QN0011: Using Excel To Modify SettingsДокумент2 страницыDigsi 5 Quick Notes DIGSI-5-QN0011: Using Excel To Modify SettingsMichael Parohinog GregasОценок пока нет
- Commissioning & Maintenance of Protective Relays: Technical InstituteДокумент65 страницCommissioning & Maintenance of Protective Relays: Technical InstituteSteve WanОценок пока нет
- Use of Travelling Waves Principle in Protection Systems and Related AutomationsДокумент52 страницыUse of Travelling Waves Principle in Protection Systems and Related AutomationsUtopia BogdanОценок пока нет
- Lfaa en 0926Документ8 страницLfaa en 0926carlose_123Оценок пока нет
- P14NДокумент21 страницаP14NIslami TriandikoОценок пока нет
- Auto Recloser Setting WIT-7001-002-0021 PDFДокумент12 страницAuto Recloser Setting WIT-7001-002-0021 PDFBalan PalaniappanОценок пока нет
- 01 ADVC - 206A - FV Basic Protection ElementsДокумент41 страница01 ADVC - 206A - FV Basic Protection ElementsMiguel ParedesОценок пока нет
- Digsi 5 QN0008Документ9 страницDigsi 5 QN0008Michael Parohinog GregasОценок пока нет
- Capacitor Bank ProtectionДокумент17 страницCapacitor Bank ProtectionskisakОценок пока нет
- Application of Sectionalizers On Distribution SystemДокумент8 страницApplication of Sectionalizers On Distribution SystemRafat ThongОценок пока нет
- Site Test Report Date: Al-Osais Co. KHUDARIYAH S/S 115/13.8 KV S/S CT Supervision Relay - MVTPДокумент4 страницыSite Test Report Date: Al-Osais Co. KHUDARIYAH S/S 115/13.8 KV S/S CT Supervision Relay - MVTPsikander843562Оценок пока нет
- Digital Substation TestsДокумент10 страницDigital Substation Testsraghavendran raghuОценок пока нет
- Relay Protection of Distribution Networks Eugeniusz Rosołowski Protection and Control of Distributed Energy ResourcesДокумент88 страницRelay Protection of Distribution Networks Eugeniusz Rosołowski Protection and Control of Distributed Energy Resourcesahvaz1392bОценок пока нет
- Mnaual For Thermal Overload Protection 1Документ3 страницыMnaual For Thermal Overload Protection 1Pw Fung100% (2)
- HVDC LДокумент4 страницыHVDC LyesidОценок пока нет
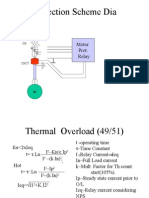
- Protection Scheme Dia: Motor Prot. RelayДокумент9 страницProtection Scheme Dia: Motor Prot. RelayPradipta Kumar MohantyОценок пока нет
- Rho 3 Application For Broken Conductor Detection On Overhead Line FeedersДокумент1 страницаRho 3 Application For Broken Conductor Detection On Overhead Line Feedersrtsr1990Оценок пока нет
- 505208-UEN - TRM REB670I 1p2 PDFДокумент756 страниц505208-UEN - TRM REB670I 1p2 PDFLeandro FerrariОценок пока нет
- Bang Gia Kacon 3Документ16 страницBang Gia Kacon 3Tùng Mai ThanhОценок пока нет
- Insulation Coordination Studies For 400 KV Gis in A Hydroelectric Project in IndiaДокумент6 страницInsulation Coordination Studies For 400 KV Gis in A Hydroelectric Project in IndiaAchint KumarОценок пока нет
- MHO Distance Protection SettingДокумент17 страницMHO Distance Protection SettingAdhyartha KerafОценок пока нет
- Basic Protection and Relaying SchemesДокумент58 страницBasic Protection and Relaying SchemesputrasejahtraОценок пока нет
- Arrester Protection DistanceДокумент8 страницArrester Protection DistanceyaoОценок пока нет
- Polezero Tracking Frequency Compensation For Low Dropout RegulatorДокумент4 страницыPolezero Tracking Frequency Compensation For Low Dropout Regulatorabhishekmath123Оценок пока нет
- Siemens Vacuum Switching Technology Meets Medium-Voltage RequirementsДокумент32 страницыSiemens Vacuum Switching Technology Meets Medium-Voltage RequirementsSaurav BhattaraiОценок пока нет
- Digsi 5 QN0013Документ5 страницDigsi 5 QN0013Michael Parohinog GregasОценок пока нет
- Photovoltaic Standards ReferenceДокумент2 страницыPhotovoltaic Standards ReferenceChandra Salim100% (2)
- Protection Discrimination and Timing: On The ADVC ControllerДокумент39 страницProtection Discrimination and Timing: On The ADVC ControllerMiguel ParedesОценок пока нет
- Sepam PerformanceДокумент56 страницSepam PerformanceThức VõОценок пока нет
- Protection Scheme: Types and Voltage Level of FeedersДокумент8 страницProtection Scheme: Types and Voltage Level of Feedersrommel76Оценок пока нет
- Alstom Grid - RPC&HF - Alstom Grid OfferingДокумент123 страницыAlstom Grid - RPC&HF - Alstom Grid OfferingSathit BuapanommasОценок пока нет
- Selecting LV Circuit Breakers Based on Ics Rather than IcuДокумент2 страницыSelecting LV Circuit Breakers Based on Ics Rather than IcuUsama AhmedОценок пока нет
- EMEK Manufactures Quality Instrument TransformersДокумент18 страницEMEK Manufactures Quality Instrument Transformersedn_mj3707Оценок пока нет
- Arc Flash Exercise 1: Purpose & DescriptionДокумент5 страницArc Flash Exercise 1: Purpose & DescriptionLiliana ParadaОценок пока нет
- Auto-Reclosing On Ehv Lines.: Y. K. PandharipandeДокумент12 страницAuto-Reclosing On Ehv Lines.: Y. K. PandharipandeJai GuptaОценок пока нет
- Lock Rotor ProtectionДокумент3 страницыLock Rotor ProtectionTonoTonyОценок пока нет
- 1MDB01002-En en Selection GuidesДокумент17 страниц1MDB01002-En en Selection GuidestandinttОценок пока нет
- KTH IEC 61850 For Substation Automation 2013-04-12Документ105 страницKTH IEC 61850 For Substation Automation 2013-04-12Chad WoodОценок пока нет
- ABB IED 670 Getting Started GuideДокумент12 страницABB IED 670 Getting Started Guided_rosembergОценок пока нет
- APN-047 Line Differential Protection and TPZ Class CT PDFДокумент6 страницAPN-047 Line Differential Protection and TPZ Class CT PDFmubarakkirkoОценок пока нет
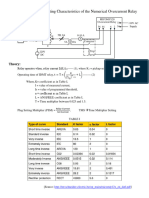
- Numerical Overcurrent Relay and Relay CoordinationДокумент7 страницNumerical Overcurrent Relay and Relay Coordinationvoyimat216Оценок пока нет
- Manual-Relay SettingДокумент7 страницManual-Relay SettingRakesh ChauhanОценок пока нет
- Thermal Modeling of PE Devices: T-TN007 (v1.3) December 26, 2018Документ14 страницThermal Modeling of PE Devices: T-TN007 (v1.3) December 26, 2018sri261eeeОценок пока нет
- RHV Lab Mannual 2020-21 RCNДокумент39 страницRHV Lab Mannual 2020-21 RCNVeershett MetreОценок пока нет
- HAZEU PaperДокумент6 страницHAZEU Papercedric.hazeuОценок пока нет
- Rho3 Section5 Application GuideДокумент8 страницRho3 Section5 Application Guidertsr1990Оценок пока нет
- Service Factor - What Is It and What Does It DoДокумент2 страницыService Factor - What Is It and What Does It DosurawutwijarnОценок пока нет
- Steady-State Characteristics of A DC MotorДокумент4 страницыSteady-State Characteristics of A DC MotorhxmutОценок пока нет
- The Necessity and Challenges of Modeling and Coordinating Microprocessor Based Thermal Overload Functions For Device Protection 1Документ22 страницыThe Necessity and Challenges of Modeling and Coordinating Microprocessor Based Thermal Overload Functions For Device Protection 1VũDuyTânОценок пока нет
- AC Motor ProtectionДокумент33 страницыAC Motor ProtectionLoretta KimОценок пока нет
- ABB A95-30 OLR Thermal - Overload - TechspecsДокумент9 страницABB A95-30 OLR Thermal - Overload - TechspecsTarun AhujaОценок пока нет
- R6134E Setting Guide OPNДокумент5 страницR6134E Setting Guide OPNrajinipre-1Оценок пока нет
- C57 12 20-2011Документ55 страницC57 12 20-2011Cesar MachadoОценок пока нет
- ID-SPE-SGLA36AT0600 Product DetailsДокумент3 страницыID-SPE-SGLA36AT0600 Product DetailsCesar MachadoОценок пока нет
- Switchboards and VFDsДокумент4 страницыSwitchboards and VFDsMateoОценок пока нет
- Zelio Control Relays - RM22TR33Документ7 страницZelio Control Relays - RM22TR33Cesar MachadoОценок пока нет
- SIMMTTECSAДокумент12 страницSIMMTTECSAHitesh PanigrahiОценок пока нет
- Economic DispatchДокумент39 страницEconomic DispatchCesar MachadoОценок пока нет
- Curva ModelДокумент1 страницаCurva ModelOmar_35Оценок пока нет
- Ieee C37.43.2008Документ22 страницыIeee C37.43.2008Cesar MachadoОценок пока нет
- Modeling Relion Thermal Overload CurveДокумент10 страницModeling Relion Thermal Overload CurveCesar MachadoОценок пока нет
- Distance Elements: Linking Theory With TestingДокумент21 страницаDistance Elements: Linking Theory With TestingCesar MachadoОценок пока нет
- Despacho EconomicoДокумент7 страницDespacho EconomicoCesar MachadoОценок пока нет
- Power flow calculations overviewДокумент93 страницыPower flow calculations overviewgovindarulОценок пока нет
- Testing of Circuit Breaker and Over Current Relay Implementation by Using MATLAB / SIMULINKДокумент13 страницTesting of Circuit Breaker and Over Current Relay Implementation by Using MATLAB / SIMULINKCesar MachadoОценок пока нет
- Practical Introduction To Power System Protection & ControlДокумент94 страницыPractical Introduction To Power System Protection & Controlriogomes73% (11)
- Evaluation of DSP Based Numerical Relay For Overcurrent ProtectionДокумент8 страницEvaluation of DSP Based Numerical Relay For Overcurrent ProtectionMano DragonОценок пока нет
- Evaluation of DSP Based Numerical Relay For Overcurrent ProtectionДокумент8 страницEvaluation of DSP Based Numerical Relay For Overcurrent ProtectionMano DragonОценок пока нет
- IEEE c37-90-2-1995-Capability-Capability-of-Relay-Systems-to-Radi PDFДокумент14 страницIEEE c37-90-2-1995-Capability-Capability-of-Relay-Systems-to-Radi PDFCesar Machado0% (1)
- Compact NS - 630A - 32704Документ3 страницыCompact NS - 630A - 32704Cesar MachadoОценок пока нет
- Modelling of Electromechanical Relays Taking Into Account Movement and Electric CircuitsДокумент4 страницыModelling of Electromechanical Relays Taking Into Account Movement and Electric CircuitsCesar MachadoОценок пока нет
- Software Models For RelaysДокумент10 страницSoftware Models For RelaysCesar MachadoОценок пока нет
- Fundamentals of Power System ProtectionДокумент15 страницFundamentals of Power System Protectionty14344100% (1)
- PowerApps Validation Document – Load Flow Studies ComparisonДокумент24 страницыPowerApps Validation Document – Load Flow Studies ComparisonCesar MachadoОценок пока нет
- Compact NS - 630A - 32426Документ2 страницыCompact NS - 630A - 32426Cesar MachadoОценок пока нет
- QPSKДокумент11 страницQPSKCesar MachadoОценок пока нет
- Electric Machines 6/e (Spanish) - Fraile-MoraДокумент1 страницаElectric Machines 6/e (Spanish) - Fraile-MoraCesar MachadoОценок пока нет
- Asset Integrity Management for Offshore and Onshore StructuresОт EverandAsset Integrity Management for Offshore and Onshore StructuresОценок пока нет
- Machinery Lubrication Technician (MLT) I and II Certification Exam GuideОт EverandMachinery Lubrication Technician (MLT) I and II Certification Exam GuideРейтинг: 2 из 5 звезд2/5 (1)
- Industrial Piping and Equipment Estimating ManualОт EverandIndustrial Piping and Equipment Estimating ManualРейтинг: 5 из 5 звезд5/5 (7)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionОт EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionРейтинг: 4.5 из 5 звезд4.5/5 (16)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)От EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Рейтинг: 5 из 5 звезд5/5 (2)
- Pocket Guide to Flanges, Fittings, and Piping DataОт EverandPocket Guide to Flanges, Fittings, and Piping DataРейтинг: 3.5 из 5 звезд3.5/5 (22)
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesОт EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertРейтинг: 3 из 5 звезд3/5 (2)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsОт EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsОценок пока нет
- Pipeline Integrity: Management and Risk EvaluationОт EverandPipeline Integrity: Management and Risk EvaluationРейтинг: 4.5 из 5 звезд4.5/5 (6)
- Well Control for Completions and InterventionsОт EverandWell Control for Completions and InterventionsРейтинг: 4 из 5 звезд4/5 (10)
- Certified Solidworks Professional Advanced Weldments Exam PreparationОт EverandCertified Solidworks Professional Advanced Weldments Exam PreparationРейтинг: 5 из 5 звезд5/5 (1)
- Practical Reservoir Engineering and CharacterizationОт EverandPractical Reservoir Engineering and CharacterizationРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Hydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisОт EverandHydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisОценок пока нет
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressОт EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressРейтинг: 5 из 5 звезд5/5 (1)