Вам также может понравиться
- Dynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionДокумент41 страницаDynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionJJ Enzon100% (1)
- Slide Ch12 Kinematics of ParticlesДокумент136 страницSlide Ch12 Kinematics of ParticlesShahrul ShafiqОценок пока нет
- Problems Differential EquationsДокумент121 страницаProblems Differential EquationsRazes50% (4)
- Chapter 3 Work and Energy MethodДокумент23 страницыChapter 3 Work and Energy Methoddudescape100% (1)
- Umay DesignДокумент55 страницUmay DesignMhel CenidozaОценок пока нет
- Differential Equations - Elementary Applications of ODE PDFДокумент41 страницаDifferential Equations - Elementary Applications of ODE PDFBob BlohОценок пока нет
- Laplace TransformsДокумент15 страницLaplace TransformsMuhammad Helmyreza Jeffery SalimОценок пока нет
- Module-3 Laplace and Inverse Laplace Transforms PDFДокумент45 страницModule-3 Laplace and Inverse Laplace Transforms PDFPreetham N KumarОценок пока нет
- Rectilinear Motion: Engr. John Dharyl R. de Leon, ReeДокумент22 страницыRectilinear Motion: Engr. John Dharyl R. de Leon, ReeJamie MedallaОценок пока нет
- Strength of Materials Compilation Team Malakas XD 1Документ43 страницыStrength of Materials Compilation Team Malakas XD 1Reiniel Cirujano AntonioОценок пока нет
- Dynamics - Kinematics 1 PDFДокумент11 страницDynamics - Kinematics 1 PDFChuck Dave DiazОценок пока нет
- Homework 1 3Документ6 страницHomework 1 3inisdeprawn100% (2)
- 02 KinematicsДокумент17 страниц02 KinematicsRonelle MaglayoОценок пока нет
- Correlation 1: DynamicsДокумент14 страницCorrelation 1: DynamicsLaurence Ciervo0% (1)
- Dynamics of Rigid Bodies Midterm ExamДокумент2 страницыDynamics of Rigid Bodies Midterm ExamRUE0% (1)
- G17 - Dynamics - Rectilinear Motion - ProblemsДокумент27 страницG17 - Dynamics - Rectilinear Motion - ProblemsIsrael MGОценок пока нет
- Mesh and Nodal AnalysisДокумент33 страницыMesh and Nodal AnalysisBenjamin Konaya Makoni100% (1)
- Dynamics 2019 NotesДокумент10 страницDynamics 2019 NotesLoed Baruis SamsonОценок пока нет
- Ch. 11 Kinematics of ParticlesДокумент90 страницCh. 11 Kinematics of ParticlesMatt Finke100% (1)
- FrictionДокумент15 страницFrictionMhai MabantaОценок пока нет
- Chapter 3 - Methods of Analysis PDFДокумент47 страницChapter 3 - Methods of Analysis PDFNisha Kamel100% (2)
- Basic Ee Module 1 Discussion 2 Me2bДокумент41 страницаBasic Ee Module 1 Discussion 2 Me2bStephen papaОценок пока нет
- FluidsДокумент1 страницаFluidsnico aspraОценок пока нет
- Rivet, Bolted and Welded ConncetionДокумент62 страницыRivet, Bolted and Welded Conncetionirin100% (1)
- Dynamics Midterm ExamДокумент3 страницыDynamics Midterm ExamPenuel G. BantogОценок пока нет
- Curvilinear-Motion DYNAMICS-OF-RIGID-BODIES CE 3 27Документ2 страницыCurvilinear-Motion DYNAMICS-OF-RIGID-BODIES CE 3 27Cacao Jayr-maeОценок пока нет
- Report in Ce LAWДокумент20 страницReport in Ce LAWGadiriel TorresОценок пока нет
- Module 2 - Rectilinear MotionДокумент33 страницыModule 2 - Rectilinear MotionRozel100% (2)
- QUIZ ASSIGNMENT NO. 1 Dynamic of Rigid Bodies Answer KeyДокумент15 страницQUIZ ASSIGNMENT NO. 1 Dynamic of Rigid Bodies Answer KeyAicelleОценок пока нет
- Newton's Law of CoolingДокумент2 страницыNewton's Law of CoolingChristian Elim SoliganОценок пока нет
- Dynamics 1 DiscussionДокумент27 страницDynamics 1 DiscussionjlОценок пока нет
- QUIZ ASSIGNMENT NO. 2 Dynamic of Rigid Bodies Answer Key 1Документ26 страницQUIZ ASSIGNMENT NO. 2 Dynamic of Rigid Bodies Answer Key 1AicelleОценок пока нет
- Money Time LowДокумент41 страницаMoney Time LowChristian Sunga0% (2)
- Equations Reducible To Variables SeparableДокумент4 страницыEquations Reducible To Variables SeparablebenrasheedОценок пока нет
- CH-3 Strength of MaterialsДокумент33 страницыCH-3 Strength of Materialsethiopia ethiopia100% (2)
- Strength of Materials-Moving LoadsДокумент48 страницStrength of Materials-Moving Loadscmrayos100% (3)
- Discrete Probability DistributionДокумент5 страницDiscrete Probability DistributionKent G NacaytunaОценок пока нет
- 6 - Linear Differential Equations of Order N PDFДокумент19 страниц6 - Linear Differential Equations of Order N PDFRuel Japhet BitoyОценок пока нет
- Dynamics of Rigid BodiesДокумент16 страницDynamics of Rigid BodiesFernando Alcala Dela CruzОценок пока нет
- Dynamics of Rigid BodiesДокумент3 страницыDynamics of Rigid BodiesRalph Lauren RodriguezОценок пока нет
- Kinetics of Particles ProblemsДокумент17 страницKinetics of Particles ProblemsCha Castillo100% (1)
- CN Chap10 - Moments of InertiaДокумент25 страницCN Chap10 - Moments of Inertiaengineer_atulОценок пока нет
- ABE 228 Engg Mech 2 Module 2Документ14 страницABE 228 Engg Mech 2 Module 2Cynel DelaОценок пока нет
- Lecture 2 (Kinematics of Particles, Uniform Rectilinear Motion - Uniformly Accelerated Rectilinear Motion)Документ26 страницLecture 2 (Kinematics of Particles, Uniform Rectilinear Motion - Uniformly Accelerated Rectilinear Motion)Robby RebolledoОценок пока нет
- Mechanics of Deformable Bodies Review ProblemsДокумент7 страницMechanics of Deformable Bodies Review ProblemsadrianОценок пока нет
- Elementary Applications: I. Growth and DecayДокумент5 страницElementary Applications: I. Growth and DecayJuvilee RicoОценок пока нет
- Upang Cea Common Bes025 p3Документ69 страницUpang Cea Common Bes025 p3Jairo OntongОценок пока нет
- Conservation of MomentumДокумент1 страницаConservation of MomentumBeatrice Elizabeth SangalangОценок пока нет
- Lab. Equipments FamiliarizationДокумент3 страницыLab. Equipments FamiliarizationashfaqiОценок пока нет
- Engineering Mechanics: Statics Lecture 1 PDFДокумент16 страницEngineering Mechanics: Statics Lecture 1 PDFKhalid YousafОценок пока нет
- Mechanics of Deformable Bodies Solved ProblemsДокумент10 страницMechanics of Deformable Bodies Solved ProblemsYan NieОценок пока нет
- Answered ProblemsДокумент38 страницAnswered ProblemsNida Bagoyboy NatichoОценок пока нет
- Kinematics of ParticlesДокумент99 страницKinematics of Particlesrevit37100% (3)
- Projectile MotionДокумент7 страницProjectile MotionZuraida Hanim ZainiОценок пока нет
- Rectilinear Kinematics PDFДокумент15 страницRectilinear Kinematics PDFDaniel Naoe FestinОценок пока нет
- Curvilinear Upto ProjectileДокумент28 страницCurvilinear Upto ProjectileLuis PasicolanОценок пока нет
- SN Sec 12-4 12-5Документ19 страницSN Sec 12-4 12-5bigbangmelvanОценок пока нет
- Sep 20-2022 Tuesday, CH 12 (4-5) Curvilinear Motion X-Y CoordinateДокумент41 страницаSep 20-2022 Tuesday, CH 12 (4-5) Curvilinear Motion X-Y CoordinateSuhaib IntezarОценок пока нет
- PE2113-Chapter 12 - Dynamics - Draft1Документ115 страницPE2113-Chapter 12 - Dynamics - Draft1Mohammed AlkhalifaОценок пока нет
- Curvilinear Motion: Rectangular Components Projectiles (Sections 12.4-12.6)Документ34 страницыCurvilinear Motion: Rectangular Components Projectiles (Sections 12.4-12.6)Mohamed DamraОценок пока нет
- Fans & Blowers-Calculation of PowerДокумент20 страницFans & Blowers-Calculation of PowerPramod B.Wankhade92% (24)
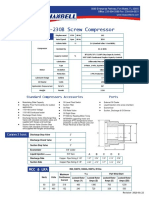
- Hanbell Spec Sheet RC2-230B PDFДокумент1 страницаHanbell Spec Sheet RC2-230B PDFDaniel Naoe FestinОценок пока нет
- Rubik 5 X 5 X 5 Solution MonroeДокумент15 страницRubik 5 X 5 X 5 Solution MonroeLulu MiticaОценок пока нет
- Rubik 5 X 5 X 5 Solution MonroeДокумент15 страницRubik 5 X 5 X 5 Solution MonroeLulu MiticaОценок пока нет
- COPs, EERs, and SEERs - Power KnotДокумент8 страницCOPs, EERs, and SEERs - Power KnotDaniel Naoe FestinОценок пока нет
- Rubik 5 X 5 X 5 Solution MonroeДокумент15 страницRubik 5 X 5 X 5 Solution MonroeLulu MiticaОценок пока нет
- Diode ProblemsДокумент14 страницDiode ProblemsKevin Maniego Calanno100% (1)
- Chap 1 Magnetics ... Energy ConversionДокумент36 страницChap 1 Magnetics ... Energy ConversionDaniel Naoe FestinОценок пока нет
- Fans & Blowers-Calculation of PowerДокумент20 страницFans & Blowers-Calculation of PowerPramod B.Wankhade92% (24)
- Environmental Impact and Impact Assessment of Seawater DesalinationДокумент1 страницаEnvironmental Impact and Impact Assessment of Seawater DesalinationDaniel Naoe FestinОценок пока нет
- Ee22 Part 5 3phase Induction Motors PDFДокумент28 страницEe22 Part 5 3phase Induction Motors PDFDaniel Naoe FestinОценок пока нет
- Experiment 2Документ9 страницExperiment 2Daniel Naoe Festin100% (1)
- Elesus MachinesДокумент267 страницElesus MachinesDaniel Naoe FestinОценок пока нет
- Safety & Health Management System Training: Lesson 4 - Hazard Prevention & ControlДокумент58 страницSafety & Health Management System Training: Lesson 4 - Hazard Prevention & Controlokbangaet100% (1)
- Part 1 - Intro To Engineering ManagementДокумент44 страницыPart 1 - Intro To Engineering ManagementShane Potpot Malana100% (1)
- Chapter 1 SetsДокумент36 страницChapter 1 SetsDaniel Naoe FestinОценок пока нет
- Elec Chap 3Документ28 страницElec Chap 3Giezel RevisОценок пока нет
- Rectilinear Kinematics PDFДокумент15 страницRectilinear Kinematics PDFDaniel Naoe FestinОценок пока нет
- 023 Ch02 Energy AnalysisДокумент37 страниц023 Ch02 Energy AnalysisDaniel Naoe FestinОценок пока нет
- LAN Keeps Disconnecting and Connecting Constantly Solved - Windows 7 Help ForumsДокумент6 страницLAN Keeps Disconnecting and Connecting Constantly Solved - Windows 7 Help ForumsDaniel Naoe FestinОценок пока нет
- Introduction To ProbabilityДокумент10 страницIntroduction To ProbabilityDaniel Naoe FestinОценок пока нет
- DNA TechnologyДокумент31 страницаDNA TechnologyDaniel Naoe FestinОценок пока нет
- Part 2 - Planning & Decision MakingДокумент51 страницаPart 2 - Planning & Decision MakingDaniel Naoe FestinОценок пока нет
- Fayol's 14 Principles of ManagementДокумент2 страницыFayol's 14 Principles of ManagementDaniel Naoe FestinОценок пока нет
- DAO 1992-29 - IRR of RA6969Документ27 страницDAO 1992-29 - IRR of RA6969Pacific Spectrum100% (1)
- Ra 9003 PDFДокумент44 страницыRa 9003 PDFMhare Oroceo Casanova100% (1)
- Ee22 Part 6 1phase Induction MotorsДокумент19 страницEe22 Part 6 1phase Induction MotorsDaniel Naoe FestinОценок пока нет
- Basic Processes of LearningДокумент10 страницBasic Processes of LearningDaniel Naoe FestinОценок пока нет
- Group 8 Report (Postmodernism)Документ22 страницыGroup 8 Report (Postmodernism)Daniel Naoe FestinОценок пока нет
- MIT Thesis Guidelines For Kinetic Architecture PDFДокумент73 страницыMIT Thesis Guidelines For Kinetic Architecture PDFSamya Rakshit0% (1)
- Board Question Paper: July 2016: Mathematics and StatisticsДокумент4 страницыBoard Question Paper: July 2016: Mathematics and StatisticsYSDОценок пока нет
- Aircraft Equations of Motion - 2Документ26 страницAircraft Equations of Motion - 2UNsha bee komОценок пока нет
- Test Bank For Elementary Geometry For College Students 7th Edition Daniel C Alexander Geralyn M KoeberleinДокумент5 страницTest Bank For Elementary Geometry For College Students 7th Edition Daniel C Alexander Geralyn M Koeberleinrosabellatrinh6a8o3Оценок пока нет
- Worksheet Q3 Week 4Документ4 страницыWorksheet Q3 Week 4Jaybie TejadaОценок пока нет
- Rotational MotionДокумент87 страницRotational Motionkushagrajoshi69Оценок пока нет
- One Stop For Colleges Education Career: Minglebox e-CAT PrepДокумент11 страницOne Stop For Colleges Education Career: Minglebox e-CAT PrepVashishta VashuОценок пока нет
- Triangles Previous Year Questions PDFДокумент4 страницыTriangles Previous Year Questions PDFShruti RajОценок пока нет
- Presentation 1Документ11 страницPresentation 1james hardenОценок пока нет
- Problem Sheet 2Документ4 страницыProblem Sheet 2Qingpo WuwuОценок пока нет
- Calculus IIIvectorcalculus 2011Документ82 страницыCalculus IIIvectorcalculus 2011Alfi LouisОценок пока нет
- NCERT Solutions For Class 9 Maths Chapter 7 Geometry of TrianglesДокумент21 страницаNCERT Solutions For Class 9 Maths Chapter 7 Geometry of Trianglessuresh muthuramanОценок пока нет
- Math Quiz Bee Grade 6Документ4 страницыMath Quiz Bee Grade 6ChesterMercado94% (35)
- Extensions of A Theorem of Van Aubel: 1 Introduction and PreliminariesДокумент11 страницExtensions of A Theorem of Van Aubel: 1 Introduction and PreliminariesTom DavisОценок пока нет
- CCP-MT (1 1e) PDFДокумент184 страницыCCP-MT (1 1e) PDFRajat KaliaОценок пока нет
- Unit Iv - Complex Integration PDFДокумент56 страницUnit Iv - Complex Integration PDFSyed Safeequr RahmanОценок пока нет
- Mom 2 Strain TransformationДокумент16 страницMom 2 Strain TransformationNusrat AliОценок пока нет
- Collision Detection EllipseДокумент20 страницCollision Detection EllipsemasharecoОценок пока нет
- RTSXcmdrefДокумент86 страницRTSXcmdrefAntonio AlbieroОценок пока нет
- Component ListДокумент75 страницComponent ListMohammad salman KaziОценок пока нет
- 2017 Add Maths Trial SPM Paper 1Документ16 страниц2017 Add Maths Trial SPM Paper 1zurasgmtОценок пока нет
- Mathematics B.A, B.Sc. Syllabus Final PDFДокумент27 страницMathematics B.A, B.Sc. Syllabus Final PDFVishal Kumar SinghОценок пока нет
- Transformations and MatricesДокумент8 страницTransformations and MatricesHarsh ShuklaОценок пока нет
- A Lesson Plan in Math 8Документ14 страницA Lesson Plan in Math 8Care Nature100% (14)
- Séries de BravisДокумент44 страницыSéries de BravistauchragaОценок пока нет
- Chapter 4-Ex 4.1Документ6 страницChapter 4-Ex 4.1FAISAL RAHIMОценок пока нет
- KKP Mte 3110 - 3Документ56 страницKKP Mte 3110 - 3Siti Khirnie KasbolahОценок пока нет
- Add Math Specimen 2011Документ16 страницAdd Math Specimen 2011dann_991Оценок пока нет
- CH 4Документ123 страницыCH 4Loc Nguyen100% (3)
- Sp015 Nota Fizik Topic 2Документ78 страницSp015 Nota Fizik Topic 2Khairul ImranОценок пока нет