Вам также может понравиться
- Energy Audit of A 400-220 KV SubstationДокумент8 страницEnergy Audit of A 400-220 KV Substationabhishekrathi09100% (2)
- Sustainable Energy Handbook: Grid Loss ReductionДокумент32 страницыSustainable Energy Handbook: Grid Loss ReductionAlifBaОценок пока нет
- 500KV Grid StationДокумент37 страниц500KV Grid StationMohammad Arslan Yousaf100% (3)
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsОт EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsОценок пока нет
- Vortex Panel Method For Calculating Airfoil CharaceristicsДокумент7 страницVortex Panel Method For Calculating Airfoil CharaceristicsNickunj PatelОценок пока нет
- ELL 303 - 31mar2021Документ225 страницELL 303 - 31mar2021Harsh Kumar RajОценок пока нет
- Insight - 07 Electrical Power SystemsДокумент16 страницInsight - 07 Electrical Power SystemsrubenarisОценок пока нет
- RE 709 Smart Grid: Transmission SystemДокумент34 страницыRE 709 Smart Grid: Transmission SystemRamaDinakaranОценок пока нет
- NASA Power SpaceДокумент16 страницNASA Power Spacecata_alex_muntОценок пока нет
- Lecture 1 - Introduction - Chapter 1Документ50 страницLecture 1 - Introduction - Chapter 1Daniel NimabwayaОценок пока нет
- Chapter 1 - Intro - Lecture SlideДокумент29 страницChapter 1 - Intro - Lecture Slidesir isaОценок пока нет
- Electrical Energy AuditДокумент27 страницElectrical Energy AuditGH Eco RJОценок пока нет
- Chapter 1 - New1Документ63 страницыChapter 1 - New1sana oneОценок пока нет
- HVDC Transmission LinesДокумент19 страницHVDC Transmission LinesAnil GugulothОценок пока нет
- ELL 303 - Presentation 1Документ21 страницаELL 303 - Presentation 1SwapnilJiwaneОценок пока нет
- Skee4683 Power System Design and Operation2Документ18 страницSkee4683 Power System Design and Operation2due3637Оценок пока нет
- Power Voltage Transformers For Air Insulated SubstationsДокумент8 страницPower Voltage Transformers For Air Insulated SubstationsMilton EspinozaОценок пока нет
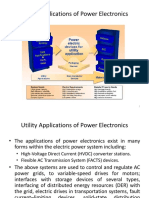
- Utility Applications of Power ElectronicsДокумент28 страницUtility Applications of Power ElectronicsElden Kyle BillonesОценок пока нет
- Design and Modelling of Multilevel Power Inverter: Presented byДокумент27 страницDesign and Modelling of Multilevel Power Inverter: Presented byPunit RatnaniОценок пока нет
- Electro 3: Bachelor of Science in Marine EngineeringДокумент114 страницElectro 3: Bachelor of Science in Marine EngineeringPachito S. SucalitОценок пока нет
- ABB - SFC - Reference - E.ON Datteln - 20171130Документ4 страницыABB - SFC - Reference - E.ON Datteln - 20171130Daniel JoseОценок пока нет
- L&T Reactive Power ManagementДокумент24 страницыL&T Reactive Power ManagementChandru Rangaraj100% (2)
- Chapter 1 & 2 PDFДокумент82 страницыChapter 1 & 2 PDFJustin AldrinОценок пока нет
- Sce - Elektro Ppu - 2022Документ2 страницыSce - Elektro Ppu - 2022sghscribd2012Оценок пока нет
- Fast Charging (350 KW) For Electric Vehicles - Possibilities and IssuesДокумент39 страницFast Charging (350 KW) For Electric Vehicles - Possibilities and IssuesVladimir PanuchОценок пока нет
- Introduction of Electric Power SystemДокумент17 страницIntroduction of Electric Power SystemsohaibОценок пока нет
- T&D (Compatibility Mode) (Repaired)Документ211 страницT&D (Compatibility Mode) (Repaired)VanaVihari DasОценок пока нет
- Applications of Power Electronics To Power SystemsДокумент8 страницApplications of Power Electronics To Power SystemsManish meenaОценок пока нет
- APlus DatasheetДокумент5 страницAPlus DatasheetMuhamad RadzmanОценок пока нет
- PPN 2018 - Clase 16 - Propulsión EléctricaДокумент32 страницыPPN 2018 - Clase 16 - Propulsión EléctricaJuan Cruz TauterysОценок пока нет
- Module 1 - FinalДокумент47 страницModule 1 - FinalSUMADEEPIKA BALAGARIОценок пока нет
- Session 14 Presnasr Copyof Joint Service Power OTC42407 FinalДокумент22 страницыSession 14 Presnasr Copyof Joint Service Power OTC42407 FinalSekwah HawkesОценок пока нет
- IPFC Operating CatalogueДокумент20 страницIPFC Operating CatalogueSuresh DevarakondaОценок пока нет
- Alternate Energy Sources EVsДокумент28 страницAlternate Energy Sources EVsirfan_nitОценок пока нет
- Eaton Power Xpert 9395 High Performance Datasheet BR153048ENДокумент2 страницыEaton Power Xpert 9395 High Performance Datasheet BR153048ENHector TroselОценок пока нет
- From 1660 To 5100 kVA: Medium Voltage Inverter Station, Customized Up To 5.1 MvaДокумент4 страницыFrom 1660 To 5100 kVA: Medium Voltage Inverter Station, Customized Up To 5.1 MvaPhelipe LealОценок пока нет
- Course IntroductionДокумент11 страницCourse IntroductionAdisuОценок пока нет
- LCD Display Panel: Programmable Outlets (P1) Connect To Non-Critical DevicesДокумент2 страницыLCD Display Panel: Programmable Outlets (P1) Connect To Non-Critical DevicesJhon SmithОценок пока нет
- 01 TL Design AspectsДокумент4 страницы01 TL Design AspectschandrakantnuОценок пока нет
- Electricity Generation - Energy Flow 2023 - DR Nilantha SapumanageДокумент48 страницElectricity Generation - Energy Flow 2023 - DR Nilantha SapumanageAaqil cassimОценок пока нет
- Energy Audit of A 400-220 KV Substation - A Case Study PDFДокумент8 страницEnergy Audit of A 400-220 KV Substation - A Case Study PDFRajuОценок пока нет
- Energy Audit of A 400-220 KV Substation - A Case StudyДокумент8 страницEnergy Audit of A 400-220 KV Substation - A Case StudyRajuОценок пока нет
- One Nation One Grid: VidhwaanДокумент22 страницыOne Nation One Grid: VidhwaanMonika SonkeriaОценок пока нет
- Chap. 1 Modified Power System GenerationДокумент87 страницChap. 1 Modified Power System Generationseyoum shimelsОценок пока нет
- Ijsea03031002 PDFДокумент5 страницIjsea03031002 PDFAbdul HamidОценок пока нет
- 22-27 2M733 - ENG72dpi PDFДокумент6 страниц22-27 2M733 - ENG72dpi PDFLuis LagunaОценок пока нет
- Regensburger2018 2Документ6 страницRegensburger2018 2vishnuappuzz07Оценок пока нет
- Presentation - Power Electronics Arrangements in Distributed SystemsДокумент50 страницPresentation - Power Electronics Arrangements in Distributed SystemsmaherejОценок пока нет
- LEA - ConvertSC - Flex - EN AEGДокумент4 страницыLEA - ConvertSC - Flex - EN AEGJitheshОценок пока нет
- 04eee - 2023 - Hvac HVDC SystemДокумент25 страниц04eee - 2023 - Hvac HVDC SystemAmbadiОценок пока нет
- Module 1 UpdatedДокумент53 страницыModule 1 UpdatedYUG VARSHNEYОценок пока нет
- Module IДокумент157 страницModule ILucas100% (3)
- Mechanical & Electrical Systems: Ohm'S LawДокумент36 страницMechanical & Electrical Systems: Ohm'S LawSTEEОценок пока нет
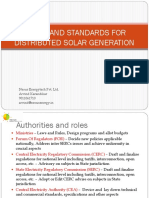
- Codes and Standards For Distributed Solar GenerationДокумент14 страницCodes and Standards For Distributed Solar GenerationSAEL SOLARОценок пока нет
- OVERVIEW OF THE POWER SYSTEM PresentationДокумент51 страницаOVERVIEW OF THE POWER SYSTEM PresentationEngr. Muhammad IkhlaqОценок пока нет
- Super CapacitorДокумент38 страницSuper CapacitorGauthiОценок пока нет
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesОт EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesОценок пока нет
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОт EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingОценок пока нет
- Practical Transformer Handbook: for Electronics, Radio and Communications EngineersОт EverandPractical Transformer Handbook: for Electronics, Radio and Communications EngineersРейтинг: 4 из 5 звезд4/5 (16)
- BLF645Документ14 страницBLF645adam_tomasОценок пока нет
- Electrical Building Services 7771AG-V3Документ50 страницElectrical Building Services 7771AG-V3adam_tomasОценок пока нет
- STYLE GUIDE - Business AdministrationДокумент5 страницSTYLE GUIDE - Business Administrationadam_tomasОценок пока нет
- Ubuntu Unity PDFДокумент1 страницаUbuntu Unity PDFadam_tomasОценок пока нет
- Crash Course Paparazzi Part 1Документ3 страницыCrash Course Paparazzi Part 1adam_tomasОценок пока нет
- Adv TheDiscussionLeaderДокумент5 страницAdv TheDiscussionLeaderadam_tomasОценок пока нет
- AVI50215 Diploma of Aviation (Commercial Pilot Licence - Aeroplane)Документ1 страницаAVI50215 Diploma of Aviation (Commercial Pilot Licence - Aeroplane)adam_tomasОценок пока нет
- HSPICE TutorialДокумент16 страницHSPICE TutorialSantiago PiñerosОценок пока нет
- Adv InterpersonalCommunicationДокумент5 страницAdv InterpersonalCommunicationadam_tomasОценок пока нет
- ADS PA WorkshopДокумент51 страницаADS PA Workshopadam_tomasОценок пока нет
- Using FioSIM3 To Simulate Airfoil - Student ProjectДокумент19 страницUsing FioSIM3 To Simulate Airfoil - Student ProjecticetrapОценок пока нет
- Prelim QuestionsДокумент7 страницPrelim QuestionsMatt SantiagoОценок пока нет
- Doctor in PrintingДокумент57 страницDoctor in PrintingKeerthanaОценок пока нет
- Isometrics PDFДокумент2 страницыIsometrics PDFEl DiegoОценок пока нет
- BSC Aircraft MainДокумент35 страницBSC Aircraft MainAyem perumalОценок пока нет
- Ground Effect Vehicles: Mass Transport Solution For Indian Coastal Logistics and Coastal DefenseДокумент55 страницGround Effect Vehicles: Mass Transport Solution For Indian Coastal Logistics and Coastal DefenseSaptarshi BasuОценок пока нет
- Aerodynamics Lab ManualДокумент50 страницAerodynamics Lab Manualshibin874141Оценок пока нет
- Computational Study of A Pitching Bioinspired Corrugated AirfoilДокумент14 страницComputational Study of A Pitching Bioinspired Corrugated AirfoilYukesh KarkiОценок пока нет
- Aerofoil Lab Handout RwerwДокумент7 страницAerofoil Lab Handout RwerwvivekzzОценок пока нет
- Icing Flight Manual PDFДокумент188 страницIcing Flight Manual PDFMuralidharan ShanmugamОценок пока нет
- Zhong Et Al. - 2020 - A Tip Loss Correction Model For Wind Turbine AerodДокумент16 страницZhong Et Al. - 2020 - A Tip Loss Correction Model For Wind Turbine AerodThiago EscorcioОценок пока нет
- The Aircraft Engineer 1928Документ130 страницThe Aircraft Engineer 1928Mark Evan SalutinОценок пока нет
- T50 AircraftДокумент23 страницыT50 AircraftHan Thu AungОценок пока нет
- Anti-Gravity Micro MachineДокумент21 страницаAnti-Gravity Micro MachineSandip PingaleОценок пока нет
- Aerodynamics of Rotor Blades: © M. Ragheb 3/8/2018Документ24 страницыAerodynamics of Rotor Blades: © M. Ragheb 3/8/2018Kumar PranayОценок пока нет
- Passive Flow Control Over Naca0012 Aerofoil Using Vortex GeneratorsДокумент9 страницPassive Flow Control Over Naca0012 Aerofoil Using Vortex Generatorsbala wooОценок пока нет
- Aerodynamics-II Part B QuestionsДокумент7 страницAerodynamics-II Part B QuestionsAeronaughtycs Hamdan100% (1)
- Automotive AerodynamicДокумент105 страницAutomotive AerodynamicDevansh SrivastavaОценок пока нет
- The Technique of The Eggbeater KickДокумент18 страницThe Technique of The Eggbeater KickalokОценок пока нет
- Ist Syllabus BaetДокумент81 страницаIst Syllabus Baetabdulrehman001Оценок пока нет
- Lift ForceДокумент5 страницLift Forcevinkumar_hbtiОценок пока нет
- Flying Windmills: Conventional WindmillДокумент7 страницFlying Windmills: Conventional WindmillGógul100% (1)
- Aircraft Design Project 1Документ119 страницAircraft Design Project 1Ruban50% (2)
- Pof GilberthДокумент37 страницPof GilberthDarmawan Jaladri SaputraОценок пока нет
- Newtons Second Law of Motion1 2Документ8 страницNewtons Second Law of Motion1 2Book_UОценок пока нет
- Aerstab BWBДокумент9 страницAerstab BWBSîImoHäāķīīmОценок пока нет
- Test 2Документ5 страницTest 2lucifer pandeyОценок пока нет
- $MP 015 25Документ12 страниц$MP 015 25Mohammad Sli100% (1)
- ChE210-FluidMechanics-Final Exam-QUESTIONS-13062023Документ7 страницChE210-FluidMechanics-Final Exam-QUESTIONS-13062023selenaykaya8Оценок пока нет