Вам также может понравиться
- Trabajo de Maquinas Motor CC en Vacio y en CargaДокумент7 страницTrabajo de Maquinas Motor CC en Vacio y en CargaBarbaraОценок пока нет
- Motor Asincrónico o de InducciónДокумент12 страницMotor Asincrónico o de InducciónBarbaraОценок пока нет
- Manual de AlternadoresДокумент46 страницManual de Alternadoresthemaster80093% (42)
- Reactancia de Dispersion TransformadorДокумент1 страницаReactancia de Dispersion TransformadorBarbaraОценок пока нет
- Ensayo Vacio TransformadorДокумент3 страницыEnsayo Vacio TransformadorBarbaraОценок пока нет
- Ensayo Generador Shunt en VacioДокумент2 страницыEnsayo Generador Shunt en VacioBarbaraОценок пока нет
- Conexion Alternador Con La RedДокумент10 страницConexion Alternador Con La RedBarbaraОценок пока нет
- Ensayo en Cortocircuito Del TransformadorДокумент3 страницыEnsayo en Cortocircuito Del TransformadorBarbara100% (1)
- Ensayo en Carga Del TransformadorДокумент3 страницыEnsayo en Carga Del TransformadorBarbara0% (1)
- Pauta de Evaluacion PPT Control ElectronicoДокумент2 страницыPauta de Evaluacion PPT Control ElectronicoBarbaraОценок пока нет
- Problem Asac I Do BaseДокумент7 страницProblem Asac I Do BaseBarbara0% (1)
- Taller Iso 14001-2015Документ4 страницыTaller Iso 14001-2015andresОценок пока нет
- Mof AlmacenДокумент21 страницаMof AlmacenRAUL ARRIVASPLATA GARCIAОценок пока нет
- RUBRICA EV4 Sistemas Integrados de Gestion 2021Документ5 страницRUBRICA EV4 Sistemas Integrados de Gestion 2021Alejandro OñateОценок пока нет
- 8 Habitos Concl y RecomДокумент15 страниц8 Habitos Concl y RecomLuis Vargas0% (1)
- Massiel AnalisisДокумент5 страницMassiel AnalisisOrelvi SantosОценок пока нет
- Auditoria 1Документ3 страницыAuditoria 1Alfredo Misael Galan GarciaОценок пока нет
- Ondas SísmicasДокумент4 страницыOndas SísmicasJessica NohemiОценок пока нет
- Informe 03 Casa Fuerza - CalderosДокумент5 страницInforme 03 Casa Fuerza - CalderossantiagoОценок пока нет
- Modulo 1 Lengua Bloque 1 PDFДокумент50 страницModulo 1 Lengua Bloque 1 PDFCarmenОценок пока нет
- Manual de Metodología de La Investigación JurídicaДокумент87 страницManual de Metodología de La Investigación JurídicaLucíaОценок пока нет
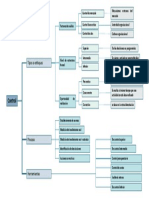
- Mapa Mental - Historia de La CalidadДокумент1 страницаMapa Mental - Historia de La CalidadSARAI LEAL ZUNIGAОценок пока нет
- Exp - 1 - y - 2 - 2019 (1) Juan Vilcazan HuaytaДокумент16 страницExp - 1 - y - 2 - 2019 (1) Juan Vilcazan HuaytaVilcazan Huayta JuanОценок пока нет
- Taller Primer Corte Métodos Númericos 2020-C2 PDFДокумент10 страницTaller Primer Corte Métodos Númericos 2020-C2 PDFJuan Esteban Garavito BuitragoОценок пока нет
- BOP26-09-02 Ordenanzas Urbanisticas Novapolop PDFДокумент8 страницBOP26-09-02 Ordenanzas Urbanisticas Novapolop PDFluverygОценок пока нет
- Programa Didactica I - Prof. Gladys Calvo - 1 Cuat 2023Документ8 страницPrograma Didactica I - Prof. Gladys Calvo - 1 Cuat 2023Avril WalesbergОценок пока нет
- Cuadro Sinoptico Del Proceso AdministrativoДокумент1 страницаCuadro Sinoptico Del Proceso Administrativoyesenia castilloОценок пока нет
- ACTIVIDAD 4 Diplomado Docencia UniversitariaДокумент2 страницыACTIVIDAD 4 Diplomado Docencia UniversitariaGerardo A. Melo CuzaОценок пока нет
- Modelo Entrevista Semi EstructuradaДокумент3 страницыModelo Entrevista Semi EstructuradaAndrés GarcíaОценок пока нет
- Economia Global Vs LocalДокумент1 страницаEconomia Global Vs LocalLuis Angel PalosОценок пока нет
- Lenguaje y CosmovisiónДокумент5 страницLenguaje y CosmovisiónAlexMGОценок пока нет
- El Concepto de Pedagogía y Su Relación Con El Contexto ActualДокумент5 страницEl Concepto de Pedagogía y Su Relación Con El Contexto Actualluz elena mendoza espinelОценок пока нет
- Acheronta 17 - Michel Foucault - Una Historia de La Sexualidad Crítica Del Psicoanálisis - Guillermo Mendoza GutierrezДокумент5 страницAcheronta 17 - Michel Foucault - Una Historia de La Sexualidad Crítica Del Psicoanálisis - Guillermo Mendoza GutierrezLuciana MedinaОценок пока нет
- Manual de Usuario Proveedor - GRUPO ROMEROДокумент17 страницManual de Usuario Proveedor - GRUPO ROMEROJavier JMОценок пока нет
- Importancia de La Expresión Corporal y en La Educación PrimariaДокумент2 страницыImportancia de La Expresión Corporal y en La Educación PrimariaMonse VillegasОценок пока нет
- Formato de PracticaДокумент8 страницFormato de PracticaAntoni JoseОценок пока нет
- Mecanizado en Torno ParaleloДокумент4 страницыMecanizado en Torno ParaleloVazquez Castro Luis AngelОценок пока нет
- Unidad I-Generalidades y Estadística Descriptiva-10115-2023 - 2Документ75 страницUnidad I-Generalidades y Estadística Descriptiva-10115-2023 - 2NikolasMoralesОценок пока нет
- D1 A1 FICHA COM. Planificamos y Escribimos Un Afiche Publicitario.Документ2 страницыD1 A1 FICHA COM. Planificamos y Escribimos Un Afiche Publicitario.VictoriaPaulinaОценок пока нет
- CC - cvp-RG-19 Durabilidad Al Sulfato de Sodio Y-O Magnesio v.01Документ1 страницаCC - cvp-RG-19 Durabilidad Al Sulfato de Sodio Y-O Magnesio v.01jorge floresОценок пока нет
- Auditoria Ambiental UagrmДокумент24 страницыAuditoria Ambiental UagrmJose Mampaso100% (2)