Вам также может понравиться
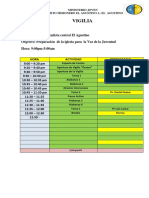
- Programa de VigiliaДокумент2 страницыPrograma de Vigiliaalain villavicencio100% (1)
- Mate 3Документ2 страницыMate 3alain villavicencioОценок пока нет
- Especialidad de Electricidad Torno ElectronicaДокумент21 страницаEspecialidad de Electricidad Torno Electronicaalain villavicencioОценок пока нет
- Aplicaciones Del Efecto VenturiДокумент3 страницыAplicaciones Del Efecto Venturialain villavicencioОценок пока нет
- Simulación en ProteusДокумент5 страницSimulación en Proteusalain villavicencio100% (1)
- Ejercicios de Algoritmos Tercera ParteДокумент2 страницыEjercicios de Algoritmos Tercera Partealain villavicencioОценок пока нет
- Control de Un Robot Autónomo Tipo Péndulo InvertidoДокумент11 страницControl de Un Robot Autónomo Tipo Péndulo Invertidoalain villavicencioОценок пока нет
- Convertidor Reductor de VDC VDC Con SCR Y Control PWMДокумент5 страницConvertidor Reductor de VDC VDC Con SCR Y Control PWMalain villavicencioОценок пока нет
- Lista de ExigenciasДокумент2 страницыLista de Exigenciasalain villavicencioОценок пока нет
- Tecnología de Materiales Ferrosos y No FerrososДокумент5 страницTecnología de Materiales Ferrosos y No Ferrososalain villavicencioОценок пока нет
- Ejercicios de Algoritmos Tercera ParteДокумент2 страницыEjercicios de Algoritmos Tercera Partealain villavicencioОценок пока нет
- Preguntas de Análisis Sobre CLAEДокумент7 страницPreguntas de Análisis Sobre CLAEAlain VillavicencioОценок пока нет
- Certificado DMS 2 024C5DДокумент2 страницыCertificado DMS 2 024C5DJUAN CARLOS MALDONADO100% (1)
- Capitulo 5 Manuales de Mecanica de Pavimentos 2018Документ111 страницCapitulo 5 Manuales de Mecanica de Pavimentos 2018Fabio GarzonОценок пока нет
- Modulo Pedagógico Biologia - Fìsica y Química PCA 2006Документ52 страницыModulo Pedagógico Biologia - Fìsica y Química PCA 2006profe_pedroОценок пока нет
- TERMODINAMICAДокумент2 страницыTERMODINAMICAJhon Palpa RamosОценок пока нет
- Accesorios de Sistemas de RiegoДокумент67 страницAccesorios de Sistemas de Riegoedilsar MazariegosОценок пока нет
- Wa0024 PDFДокумент358 страницWa0024 PDFEylin Alexsandra Ramos CandiaОценок пока нет
- Plastic Id Ad, Encogimiento y Densidad de Las Arcillas)Документ4 страницыPlastic Id Ad, Encogimiento y Densidad de Las Arcillas)Julio César PortillaОценок пока нет
- Especialidad JA Arte de AcamparДокумент23 страницыEspecialidad JA Arte de Acamparhfonck100% (2)
- Evaluacion Final - Escenario 8 - SEGUNDO BLOQUE-CIENCIAS BASICAS - FISICA I - (GRUPO6) PDFДокумент9 страницEvaluacion Final - Escenario 8 - SEGUNDO BLOQUE-CIENCIAS BASICAS - FISICA I - (GRUPO6) PDFAnacletoОценок пока нет
- Cine TicaДокумент8 страницCine TicaCarlosОценок пока нет
- Exam en 1Документ3 страницыExam en 1Cintli Lara MaryОценок пока нет
- Vectores (Metodo Del Poligono 2)Документ9 страницVectores (Metodo Del Poligono 2)Josué Dassaev100% (1)
- Ciclos BiogeoquimicosДокумент5 страницCiclos BiogeoquimicosAnonymous xjNG1RY3tОценок пока нет
- Diapositivas-Historia de La Ing CivilДокумент15 страницDiapositivas-Historia de La Ing CivilMayKol Rosas PomaОценок пока нет
- Ejercicios LeydeCoulombДокумент5 страницEjercicios LeydeCoulombAnne Hay Day NjacОценок пока нет
- Calculo de La Evapotran Spiracion Por ElДокумент14 страницCalculo de La Evapotran Spiracion Por ElgordaОценок пока нет
- Informe ResistividadДокумент35 страницInforme ResistividadManuel RojasОценок пока нет
- Informe 5Документ20 страницInforme 5Mariana Estrella Callisaya ValenciaОценок пока нет
- Albañileria EstructuralДокумент88 страницAlbañileria EstructuralAguirre Gutierrez100% (1)
- Anexo 05 A Doc Ppal Hidrologia AngosturaДокумент70 страницAnexo 05 A Doc Ppal Hidrologia Angosturaerlan100% (2)
- Degradación de M.O.Документ16 страницDegradación de M.O.Mauricio MuñozОценок пока нет
- Paradoja de La Banda EsféricaДокумент3 страницыParadoja de La Banda EsféricaYair FernanОценок пока нет
- Tratamiento Térmico Del Bronce Al AluminioДокумент3 страницыTratamiento Térmico Del Bronce Al AluminioWilmer DanielОценок пока нет
- Poligonal AbiertaДокумент26 страницPoligonal Abierta18121584100% (2)
- Determinación Del Volumen Molar de Un GasДокумент8 страницDeterminación Del Volumen Molar de Un GasEmmanuel SernaОценок пока нет
- 3 Ley de NewtonДокумент3 страницы3 Ley de NewtonAnonymous xwEihrUОценок пока нет
- Cuestionario de Ciencias II Con Énfasis en FísicaДокумент4 страницыCuestionario de Ciencias II Con Énfasis en FísicaLoupita SazsloОценок пока нет
- Ejercicios Probabilidad y EstadisticaДокумент2 страницыEjercicios Probabilidad y EstadisticaJorge Fernandez SantiagoОценок пока нет