Вам также может понравиться
- Semana 4aaДокумент22 страницыSemana 4aaUlices Rtobon100% (1)
- Equilibrio QuímicoДокумент7 страницEquilibrio QuímicoSara Salas100% (2)
- Texto Guia RESIS 1Документ136 страницTexto Guia RESIS 1ALEX FRANCISCO CABRERA VANEGAS100% (1)
- 1 - Semana 07 - S1 - Integrales Dobles - Cálculo de Áreas y VolúmenesДокумент38 страниц1 - Semana 07 - S1 - Integrales Dobles - Cálculo de Áreas y VolúmenesAndrés ChangОценок пока нет
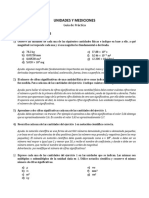
- Unidad de MedicionesДокумент6 страницUnidad de MedicionesignacioОценок пока нет
- Resuelva Completamente La Viga IndicadaДокумент9 страницResuelva Completamente La Viga IndicadaJose alejandro Perez villanuevaОценок пока нет
- Tarea de Resistencia de MaterialesДокумент30 страницTarea de Resistencia de MaterialesDante Morales OsorioОценок пока нет
- Aproximacion Polinomial y Multilineal CoДокумент59 страницAproximacion Polinomial y Multilineal CoAndres Humberto Fuquene Avenda¤oОценок пока нет
- Plan de Estudio UnachiДокумент4 страницыPlan de Estudio UnachiLuis TapiaОценок пока нет
- Tarea 3Документ8 страницTarea 3Kevin Jonathan Mendez Lopez100% (1)
- Taller Mecanica de Materiales IndividualДокумент13 страницTaller Mecanica de Materiales Individualrosa vasquezОценок пока нет
- Tema 5 - Ecuaciones Polinomiales 2Документ16 страницTema 5 - Ecuaciones Polinomiales 2Jose Felix Corzo GutierrezОценок пока нет
- VibraДокумент4 страницыVibraHelio Valenzuela SernaОценок пока нет
- Ficha Tecnica Activos de OperacionДокумент8 страницFicha Tecnica Activos de OperacionDIANA POVEDAОценок пока нет
- Problemas de ElasticidadДокумент2 страницыProblemas de ElasticidadAngie Mirella Camayo RomeroОценок пока нет
- Método de BroydenДокумент2 страницыMétodo de Broydenwendy vargasОценок пока нет
- RAZIIIДокумент15 страницRAZIIIrazhdzОценок пока нет
- GUÍA TD Conducción Del CalorДокумент1 страницаGUÍA TD Conducción Del CalorJorge OrellanaОценок пока нет
- 2020 II Cuv Ex2 Solución Todos Los TemasДокумент72 страницы2020 II Cuv Ex2 Solución Todos Los TemasAlejandro AranaОценок пока нет
- Taller Cuerpo RigidoДокумент1 страницаTaller Cuerpo RigidoAndres Felipe Lara GОценок пока нет
- Pl. Colaborante Alcor InstadeckДокумент8 страницPl. Colaborante Alcor InstadeckCabañas MarLindaОценок пока нет
- Pasos para Descargar MarvinДокумент3 страницыPasos para Descargar MarvinQuimiclassОценок пока нет
- Ajuste Por Humedad y AbsorcionДокумент2 страницыAjuste Por Humedad y Absorcioncarlosrte1Оценок пока нет
- Integrales MiasДокумент3 страницыIntegrales MiasMauro MAОценок пока нет
- Evaluación Semana #2 Calculo Avanzado (Noviembre)Документ1 страницаEvaluación Semana #2 Calculo Avanzado (Noviembre)francisco_wishОценок пока нет
- Laboratorio Solucionado Fisica MecanicaДокумент7 страницLaboratorio Solucionado Fisica MecanicaJuan David MONROY PENAОценок пока нет
- Efecto VenturiДокумент4 страницыEfecto VenturiAnonymous Ff9CX1WZwОценок пока нет
- Tema 3 Variables Aleatorias-Problemas PDFДокумент15 страницTema 3 Variables Aleatorias-Problemas PDFpedro ramirez sanxОценок пока нет
- Ejercicio 1Документ3 страницыEjercicio 1Hector Gonzalez del Valle0% (2)
- Parte 3 - Descomposición Lu y CholeskyДокумент46 страницParte 3 - Descomposición Lu y CholeskyMateo Felipe Ramirez Arbelaez100% (1)
- Guia Laboratorio de Materiales CompuestosДокумент12 страницGuia Laboratorio de Materiales Compuestossebastian becerraОценок пока нет
- Proyección EstereográficaДокумент3 страницыProyección EstereográficaSebastián Arica VidalОценок пока нет
- Capitulo 7 Control NNNNNNNДокумент55 страницCapitulo 7 Control NNNNNNNFranchesca Ancasi CalizayaОценок пока нет
- Presupuesto Instalaciones SanitariasДокумент2 страницыPresupuesto Instalaciones SanitariasYamid Ruiz Bejarano100% (1)
- Tensor de DeformacionДокумент20 страницTensor de DeformacionAristarco JjОценок пока нет
- Los Números y El ComputadorДокумент6 страницLos Números y El ComputadorJonathan David Puga BecerraОценок пока нет
- MAT1220 Ay14 SolДокумент4 страницыMAT1220 Ay14 SolJavier PizarroОценок пока нет
- Mapa Curricular PLAN2016Документ1 страницаMapa Curricular PLAN2016César AugustoОценок пока нет
- Metodo de Serie de Potencias e Interpolacion de LagrangeДокумент7 страницMetodo de Serie de Potencias e Interpolacion de LagrangeJenniffer Tatiana Cruz AlvaresОценок пока нет
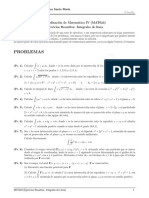
- Resueltos IntegralesDeLinea 12014Документ32 страницыResueltos IntegralesDeLinea 12014Gabriel Alonso Olmedo AlvarezОценок пока нет
- Prefijos y Factores Multiplicativos Más UsualesДокумент1 страницаPrefijos y Factores Multiplicativos Más UsualesDaniela VillegasОценок пока нет
- DocumentoДокумент54 страницыDocumentoEdgar BarreraОценок пока нет
- Práctica Calificada 2Документ22 страницыPráctica Calificada 2NEISER HELI HERRERA AGREDA - IC - ESTUDIANTEОценок пока нет
- Laboratorio 10 Colisiones PDFДокумент3 страницыLaboratorio 10 Colisiones PDFCARLOS PRIETO LIEVANOОценок пока нет
- Prontuario EstructurasДокумент52 страницыProntuario Estructurasneomatrix2009Оценок пока нет
- BETA GLUCANOS, NATURALEZA, USOS Y POSIBILIDADES FinalДокумент52 страницыBETA GLUCANOS, NATURALEZA, USOS Y POSIBILIDADES FinalGustavo Alberto Castillo Quesada100% (1)
- Potencia Carta X BarraДокумент17 страницPotencia Carta X BarraSebastian CervantesОценок пока нет
- Foro4 CalculoVectorialДокумент3 страницыForo4 CalculoVectorialLIDA GIOMAR AREVALO MALDONADO(Estudiante)Оценок пока нет
- Algoritmo de Como InyectarДокумент6 страницAlgoritmo de Como InyectarLaura Ramirez HernandezОценок пока нет
- Examen Mat1123Документ3 страницыExamen Mat1123Jorge Lahuerta Adomicilio100% (1)
- Taller Evaluativo Matrices y DeterminantesДокумент3 страницыTaller Evaluativo Matrices y DeterminantesYefer RangelОценок пока нет
- Metodos NumericosДокумент57 страницMetodos NumericosJavier Pozo SantanaОценок пока нет
- Masa PorcentualДокумент21 страницаMasa Porcentualmanuel felipe cadavid beltranОценок пока нет
- U6 E1 Luis Fernando Lopez ZamoraДокумент6 страницU6 E1 Luis Fernando Lopez ZamoraLuis Fërnandö LòpezОценок пока нет
- Proyecto1 (Catapulta)Документ19 страницProyecto1 (Catapulta)FC HeydiОценок пока нет
- Mecánica de Sólidos DeformablesДокумент5 страницMecánica de Sólidos Deformablesaldex10Оценок пока нет
- Proyecto1 (Catapulta)Документ19 страницProyecto1 (Catapulta)FC HeydiОценок пока нет
- Elasticidad (Mecánica de Sólidos) - Wikipedia, La Enciclopedia LibreДокумент24 страницыElasticidad (Mecánica de Sólidos) - Wikipedia, La Enciclopedia LibreeguizabalavilaalejandroОценок пока нет
- Ley Generalizada de HookeДокумент21 страницаLey Generalizada de Hookedaniel camacho0% (2)
- Elastic I DadДокумент16 страницElastic I Dadwilliams floresОценок пока нет
- Mecánica de Sólidos DeformablesДокумент14 страницMecánica de Sólidos DeformablescatitaxthОценок пока нет
- Antenas para Radioaficionados (1969) PDFДокумент177 страницAntenas para Radioaficionados (1969) PDFageroОценок пока нет
- Ensayo Con Carga para Determinar La Eficiencia en El Transformador de Potencia MonofasicoДокумент6 страницEnsayo Con Carga para Determinar La Eficiencia en El Transformador de Potencia MonofasicoCristian Sardon RojasОценок пока нет
- Problemas Aplicativos de Cantidad de Movimiento PDFДокумент20 страницProblemas Aplicativos de Cantidad de Movimiento PDFClinton Cornelio Poma0% (1)
- Prueba de Química, 1º Medio, 14-Mayo.Документ3 страницыPrueba de Química, 1º Medio, 14-Mayo.Alejandro Rubio OrtizОценок пока нет
- Univocidad Tecnológica Del Cibao OrientalДокумент10 страницUnivocidad Tecnológica Del Cibao OrientalJosé Miguel Gómez GuzmánОценок пока нет
- Carpeta Termodinámica 2020Документ68 страницCarpeta Termodinámica 2020mauroОценок пока нет
- Ideas PrincipalesДокумент26 страницIdeas PrincipalesHilary MaОценок пока нет
- Guía 3-1 NovenoДокумент4 страницыGuía 3-1 NovenoAndrés Riaño PachonОценок пока нет
- Ejer Cici Os 1 Er ParcialДокумент4 страницыEjer Cici Os 1 Er ParcialRichard Pastor HernandezОценок пока нет
- ExpovaleДокумент6 страницExpovaleValeria LeónОценок пока нет
- P8 - Lab #8 Pendulo Simple Civil (1) 11 de EneroДокумент5 страницP8 - Lab #8 Pendulo Simple Civil (1) 11 de EneroGerson Favio Diaz choqueОценок пока нет
- Electrones para TanniaДокумент24 страницыElectrones para TanniaJulio MarroquinОценок пока нет
- Didactica Problemica Nestor Hugo Bravo Salinas Octubre 30 de 2003Документ12 страницDidactica Problemica Nestor Hugo Bravo Salinas Octubre 30 de 2003Yofa HurОценок пока нет
- OPCION2 Actividad FinalДокумент2 страницыOPCION2 Actividad FinalhppaulalexОценок пока нет
- Clase 9Документ17 страницClase 9luisОценок пока нет
- Flujo de Fluidos en Tuberias CanalesДокумент33 страницыFlujo de Fluidos en Tuberias CanalesYekson RamirezОценок пока нет
- 1er Informe Fluidos I - Presión - Superficies Parcialmente SumergidasДокумент13 страниц1er Informe Fluidos I - Presión - Superficies Parcialmente SumergidasRamiro Alfredo Obando Díaz100% (1)
- Fuerzas ConservativasДокумент10 страницFuerzas ConservativasKaren SalazarОценок пока нет
- Trabajo Potencia y Energía (PRE)Документ6 страницTrabajo Potencia y Energía (PRE)Julio Barboza33% (3)
- Secuenciador de LucesДокумент2 страницыSecuenciador de LuceseverОценок пока нет
- Circuitos en Paralelo Elaborado PorДокумент3 страницыCircuitos en Paralelo Elaborado PorDaniel Eduardo RojasОценок пока нет
- Activ. Fisica 6º Sec 2023Документ17 страницActiv. Fisica 6º Sec 2023Dub Ruiz LijeronОценок пока нет
- Fórmulas PDFДокумент3 страницыFórmulas PDFTaiyoFurukawaОценок пока нет
- Analisis InstrumentalДокумент5 страницAnalisis InstrumentalManuel Ignacio C CОценок пока нет
- Proyecto Curricular de La Tecnicatura Superior en RadiologíaДокумент27 страницProyecto Curricular de La Tecnicatura Superior en RadiologíaSoledad CastroОценок пока нет
- Informe Fisica TorqueДокумент13 страницInforme Fisica TorqueThony ByzОценок пока нет
- Fisica Lab 4Документ6 страницFisica Lab 4Alejandro MartinezОценок пока нет
- Herramientas Sonicas PDFДокумент29 страницHerramientas Sonicas PDF4s0m0z4Оценок пока нет