Вам также может понравиться
- Introduction To Information TechnologyДокумент5 страницIntroduction To Information TechnologyMUNAWAR ALI100% (2)
- C Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingОт EverandC Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingОценок пока нет
- Single and Multi-Chip Microcontroller Interfacing: For the Motorola 6812От EverandSingle and Multi-Chip Microcontroller Interfacing: For the Motorola 6812Оценок пока нет
- Zend Framework TutorialДокумент147 страницZend Framework Tutorialminhajpmas padippurakkalОценок пока нет
- MicroLogix 1000 ManualДокумент20 страницMicroLogix 1000 ManualAsadullah QureshiОценок пока нет
- VMWare NotesДокумент134 страницыVMWare Notesvlkumar100% (1)
- Partitioned Tables and IndexesДокумент24 страницыPartitioned Tables and IndexesPeter Comrade100% (1)
- LM500Документ88 страницLM500Coste GuillaumeОценок пока нет
- Bash-Bunny Ebook v22.03Документ42 страницыBash-Bunny Ebook v22.03Proyectos UОценок пока нет
- New CS WorkBook 2023 Hardware OnlyДокумент21 страницаNew CS WorkBook 2023 Hardware OnlyAtifa Omer100% (1)
- OSI Layers Model Network AssociatesДокумент1 страницаOSI Layers Model Network Associatesacademy100% (15)
- Triple Play: Building the converged network for IP, VoIP and IPTVОт EverandTriple Play: Building the converged network for IP, VoIP and IPTVОценок пока нет
- Sinamics HMI LabДокумент10 страницSinamics HMI Labalpha1ahОценок пока нет
- Assignmnent IsankaДокумент46 страницAssignmnent IsankaDilshanОценок пока нет
- DR Profibus Sbs A5e66309-1gb PDFДокумент90 страницDR Profibus Sbs A5e66309-1gb PDFchochoroyОценок пока нет
- Tutorialv0 3Документ92 страницыTutorialv0 3Malu MohanОценок пока нет
- Beginning Micro Controllers MSP430 - V0.3 - Gustavo LitovskyДокумент92 страницыBeginning Micro Controllers MSP430 - V0.3 - Gustavo LitovskyDiego VelascoОценок пока нет
- ASIC Alvarez Valverde ReportДокумент17 страницASIC Alvarez Valverde ReportJuan VALVERDEОценок пока нет
- Ethernet Frame Transmission Using The eZ80F915050 Module: Application NoteДокумент69 страницEthernet Frame Transmission Using The eZ80F915050 Module: Application NoteUseful Videos DevotionalОценок пока нет
- Voice Over WLAN Design Guide R6.0 For OmniAccess® Stellar Access PointsДокумент85 страницVoice Over WLAN Design Guide R6.0 For OmniAccess® Stellar Access PointsAsnake TegenawОценок пока нет
- UM I94100-NAU88C22 UserManual EN Rev1.0Документ22 страницыUM I94100-NAU88C22 UserManual EN Rev1.0GAJENDRA KUMAR CHANDNIHAОценок пока нет
- Manuals TM 32Документ57 страницManuals TM 32leminhsonpdlОценок пока нет
- Basic Interoperable Scrambling System With Encrypted KeysДокумент16 страницBasic Interoperable Scrambling System With Encrypted KeysRolando Rollo AlbertiОценок пока нет
- Unipi Neuron Manual enДокумент28 страницUnipi Neuron Manual ennorbertscribdОценок пока нет
- En DM00347848Документ58 страницEn DM00347848aaaaОценок пока нет
- MSPTutorДокумент112 страницMSPTutorNichita IonutОценок пока нет
- Using Oracle Developer With The Tuxedo TP MonitorДокумент43 страницыUsing Oracle Developer With The Tuxedo TP MonitorElang BuwanaОценок пока нет
- TYWE3S Module Datasheet - Tuya Smart - DocumentationДокумент26 страницTYWE3S Module Datasheet - Tuya Smart - DocumentationNguyễn TuấnОценок пока нет
- Guide en C Pico PDFДокумент126 страницGuide en C Pico PDFJalal JouidiОценок пока нет
- Sip Trunk Service Configuration Guide For Intelepeer: Nda-31687 Issue 2.0Документ36 страницSip Trunk Service Configuration Guide For Intelepeer: Nda-31687 Issue 2.0MBAHWIERОценок пока нет
- 1 0 SV9100 SIP Trunk Config Guide XCast LabsДокумент38 страниц1 0 SV9100 SIP Trunk Config Guide XCast Labsdynamic chartsОценок пока нет
- IOT2040 Tutorial-CompactadoДокумент37 страницIOT2040 Tutorial-CompactadoCristian Dibujes SalgadoОценок пока нет
- Intel MCS-51 Macro Assembler Users Guide Sep 81 PDFДокумент324 страницыIntel MCS-51 Macro Assembler Users Guide Sep 81 PDFPatrick Stivén100% (1)
- TYWE3S Module Datasheet - Tuya Smart - DocumentationДокумент26 страницTYWE3S Module Datasheet - Tuya Smart - DocumentationMadhusudanan AshokОценок пока нет
- EN Network Interface: Installation GuideДокумент20 страницEN Network Interface: Installation Guidejuan david mendez tellezОценок пока нет
- S7A Digital Signals ENДокумент18 страницS7A Digital Signals ENShafu YenОценок пока нет
- Digital Clock: University of MumbaiДокумент19 страницDigital Clock: University of MumbaiShinde D PoojaОценок пока нет
- Samcrypto Functions: ManualДокумент55 страницSamcrypto Functions: ManualRobur PaceОценок пока нет
- Opc 1Документ49 страницOpc 1Michael Adu-boahenОценок пока нет
- ASCII Driver Manual 2800/2900: Compact Operator Interface Terminal With ASCII Communication DriversДокумент19 страницASCII Driver Manual 2800/2900: Compact Operator Interface Terminal With ASCII Communication DriversSilvia Del RioОценок пока нет
- ID-20MF-WR-FV - 13.56mhz RFID Reader Module HF Read WriteДокумент18 страницID-20MF-WR-FV - 13.56mhz RFID Reader Module HF Read WriteAbleIDLtdОценок пока нет
- Dse890 Dse891 Manual EnuДокумент53 страницыDse890 Dse891 Manual EnuRicardo NavaОценок пока нет
- Melsec Iq-R Profibus-Dp Module Function Block ReferenceДокумент44 страницыMelsec Iq-R Profibus-Dp Module Function Block ReferenceNguyễn Minh PhươngОценок пока нет
- IMXRT1050IECДокумент115 страницIMXRT1050IECremeshlogoОценок пока нет
- MS700i Series Laser Bar Code Projection Scanner: Installation and User's GuideДокумент57 страницMS700i Series Laser Bar Code Projection Scanner: Installation and User's GuidecopisoufОценок пока нет
- 117-4417588-D03 Protocol Manual Modbus HostДокумент68 страниц117-4417588-D03 Protocol Manual Modbus Hostchaiya jamsawangОценок пока нет
- DSE890 DSE891 Operators Manual PDFДокумент52 страницыDSE890 DSE891 Operators Manual PDFKhaleel KhanОценок пока нет
- FULLTEXT01Документ63 страницыFULLTEXT01BazinОценок пока нет
- ZTU-IPEX Module Datasheet - Tuya IoT Development Platform - Tuya IoT Development PlatformДокумент32 страницыZTU-IPEX Module Datasheet - Tuya IoT Development Platform - Tuya IoT Development PlatformLuthfi HanifОценок пока нет
- Speed Control of DC Motor With 8051: Food Living Outside Play Technology WorkshopДокумент7 страницSpeed Control of DC Motor With 8051: Food Living Outside Play Technology WorkshopKarthik KadavaОценок пока нет
- ECE 271, Design Project, Group 15: Carson Hannibal, Jack Woods, Mohamed Eldebri, Cory Hayes, Sean Gillen June 9th, 2017Документ18 страницECE 271, Design Project, Group 15: Carson Hannibal, Jack Woods, Mohamed Eldebri, Cory Hayes, Sean Gillen June 9th, 2017Avinash Singh PatelОценок пока нет
- Reference Manual: PC1616 / PC1832 / PC1864Документ68 страницReference Manual: PC1616 / PC1832 / PC1864bfahmed1100% (2)
- Aplus Interface Documentation Modbus TCPДокумент31 страницаAplus Interface Documentation Modbus TCPVladimirОценок пока нет
- IE EBM112 DLT1227 18 aEN 001Документ32 страницыIE EBM112 DLT1227 18 aEN 001Matias Van Balen BlankenОценок пока нет
- Getting Started: WarrantyДокумент56 страницGetting Started: Warrantyandres morenoОценок пока нет
- M340 Ethernet Communications Modules and Processors 2009 EngДокумент394 страницыM340 Ethernet Communications Modules and Processors 2009 EngRoberto CarrascoОценок пока нет
- Digital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignОт EverandDigital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignОценок пока нет
- Broadband Wireless Communications Business: An Introduction to the Costs and Benefits of New TechnologiesОт EverandBroadband Wireless Communications Business: An Introduction to the Costs and Benefits of New TechnologiesОценок пока нет
- 3 Way Crossover Design ExampleДокумент8 страниц3 Way Crossover Design Exampledebnathsuman91Оценок пока нет
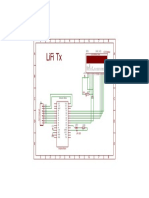
- TX 1Документ1 страницаTX 1debnathsuman91Оценок пока нет
- State Bank of India: All Revision / Corrigenda Will Be Hosted Only On The Bank's Above Mentioned WebsitesДокумент4 страницыState Bank of India: All Revision / Corrigenda Will Be Hosted Only On The Bank's Above Mentioned Websitesdebnathsuman91Оценок пока нет
- Antenna Theory: Analysis and DesignДокумент7 страницAntenna Theory: Analysis and Designdebnathsuman91Оценок пока нет
- OOK and Image ProcessingДокумент11 страницOOK and Image Processingdebnathsuman91Оценок пока нет
- Do The Link Analysis For Single Channel Point To Point System and WDM Channel System?Документ5 страницDo The Link Analysis For Single Channel Point To Point System and WDM Channel System?debnathsuman91Оценок пока нет
- Web Development Common TermsДокумент19 страницWeb Development Common Termsrodelyn waclinОценок пока нет
- GLS CSV ImportДокумент11 страницGLS CSV ImportathielsОценок пока нет
- JEDI Slides Intro1 Chapter 02 Introduction To JavaДокумент17 страницJEDI Slides Intro1 Chapter 02 Introduction To JavaredbutterflyОценок пока нет
- CipherShed User GuideДокумент152 страницыCipherShed User GuidePepeОценок пока нет
- IFIX With FIX DesktopДокумент1 080 страницIFIX With FIX DesktopmorriseyОценок пока нет
- Project Instruction For IPДокумент7 страницProject Instruction For IPtoohinamishra1201Оценок пока нет
- Visual Nand Reconstructor: Part1. FundamentalsДокумент28 страницVisual Nand Reconstructor: Part1. FundamentalsValoha VlОценок пока нет
- 8086 and Memory InterfacingДокумент11 страниц8086 and Memory InterfacingPrateek Prabhash100% (1)
- Conda CheatsheetДокумент2 страницыConda CheatsheetdagobertoОценок пока нет
- EziView BrochureДокумент2 страницыEziView Brochureวันมงคล ดีสงครามОценок пока нет
- Lenovo-Building A Global BrandДокумент33 страницыLenovo-Building A Global BrandFez Research Laboratory89% (19)
- # Installation GuideДокумент1 страница# Installation GuideCorina PopaОценок пока нет
- PIC18F45K22Документ560 страницPIC18F45K22Mauricio Rosas50% (2)
- Servlet Interview QuestionsДокумент5 страницServlet Interview QuestionsksgdbaОценок пока нет
- Uft MobileДокумент4 страницыUft MobileAryanОценок пока нет
- AssignmentДокумент12 страницAssignmentRehan AmeenОценок пока нет
- Printing An InvoiceДокумент26 страницPrinting An InvoiceRakesh RaiОценок пока нет
- Take It To The Limit: Peak Prediction-Driven Resource Overcommitment in DatacentersДокумент18 страницTake It To The Limit: Peak Prediction-Driven Resource Overcommitment in Datacentersfaker123Оценок пока нет
- Supported Visual FoxPro Commands and FunctionsДокумент3 страницыSupported Visual FoxPro Commands and FunctionsRafael Nery BritoОценок пока нет
- Fundamentals of Computer Hardware & Networking: Assembling and Disassembling PCДокумент33 страницыFundamentals of Computer Hardware & Networking: Assembling and Disassembling PCShoto TodorokiОценок пока нет
- CA3 Windows Software VersionsДокумент38 страницCA3 Windows Software VersionsRforceIbañezОценок пока нет
- Final Year Project IdeaДокумент20 страницFinal Year Project IdeashubhamОценок пока нет
- Dell Inspirion 15 5551 Compal LA-B912P r1.0Документ42 страницыDell Inspirion 15 5551 Compal LA-B912P r1.0Warren DonaldsonОценок пока нет