Вам также может понравиться
- Problemas LQ Horizonte FinitoДокумент3 страницыProblemas LQ Horizonte FinitoJuancaОценок пока нет
- Ejercicio Control LQR CPДокумент21 страницаEjercicio Control LQR CPCarlos PillajoОценок пока нет
- Gestion Del Mantenimiento - Examen 2do Parcial (Respuestas)Документ33 страницыGestion Del Mantenimiento - Examen 2do Parcial (Respuestas)Aitor TillaОценок пока нет
- Problemas Propuestos 2018-2Документ4 страницыProblemas Propuestos 2018-2Jhoelito KennedyОценок пока нет
- EL-3212 Circuitos Discretos-I Semestre 2016Документ5 страницEL-3212 Circuitos Discretos-I Semestre 2016Ruth Campos ArtaviaОценок пока нет
- Certamen 1 TEL231 2014-1Документ2 страницыCertamen 1 TEL231 2014-1Jesi Francisca Salazar NavarroОценок пока нет
- Adaptacion Con Un Transformador Cuarto de OndaДокумент2 страницыAdaptacion Con Un Transformador Cuarto de OndaEzel IngrafОценок пока нет
- Practica #3Документ14 страницPractica #3Jordan Moreira ValdezОценок пока нет
- 1.3 Circuitos RectificadoresДокумент3 страницы1.3 Circuitos RectificadoresJonaThan GuamanОценок пока нет
- Ilovepdf Merged PDFДокумент90 страницIlovepdf Merged PDFRomel ZuloagaОценок пока нет
- Lab 1Документ2 страницыLab 1Edison Abado Ancco100% (1)
- MezcladoresДокумент10 страницMezcladoresRicardo CampanaОценок пока нет
- Estudio de Los Sistemas de Control Por Modos DeslizantesДокумент12 страницEstudio de Los Sistemas de Control Por Modos DeslizantesRaul Roque YujraОценок пока нет
- Uni-Fiee Sistemas Digitales I CICLO 2020-1 EE-635 M-N Quinto LaboratorioДокумент3 страницыUni-Fiee Sistemas Digitales I CICLO 2020-1 EE-635 M-N Quinto LaboratorioAlfred PILLACA GOMEZОценок пока нет
- Silabo Circuitos Electronicos I - MorenoДокумент4 страницыSilabo Circuitos Electronicos I - MorenoJuniorYanaОценок пока нет
- T4 - Problemas Union PNДокумент10 страницT4 - Problemas Union PNJuan IbarraОценок пока нет
- Informe Previo 2Документ18 страницInforme Previo 2Jesus Juan de DiosОценок пока нет
- 4.1 Digitalizacion PCMДокумент15 страниц4.1 Digitalizacion PCMsborgo92100% (1)
- DimmerДокумент7 страницDimmerRocio Martinez RodriguezОценок пока нет
- Examen DSP-E152-2-1-20Документ1 страницаExamen DSP-E152-2-1-20dileconОценок пока нет
- CP ST Practica-N6Документ7 страницCP ST Practica-N6SOLIS TIPIAN MARTÍN ALBINOОценок пока нет
- Metodo de Falsa Posicion y SecanteДокумент2 страницыMetodo de Falsa Posicion y SecanteKeimer SapatangaОценок пока нет
- Practica 3 Hector MartinezДокумент21 страницаPractica 3 Hector MartinezHéctor J. MartínezОценок пока нет
- Convolución Lineal Discreta y Convolución Circular (Paper)Документ4 страницыConvolución Lineal Discreta y Convolución Circular (Paper)William López100% (1)
- Laboratorio 1 de MosfetДокумент2 страницыLaboratorio 1 de MosfetCARLOS REINEL DUARTE PERALTAОценок пока нет
- Capítulo 1Документ7 страницCapítulo 1Angel CalleОценок пока нет
- Informe de Laboratorio, Amplificador MultietapasДокумент5 страницInforme de Laboratorio, Amplificador MultietapasLuis Eduardo Ramírez CarvajalОценок пока нет
- Solucionario Del Examen ParcialДокумент7 страницSolucionario Del Examen ParcialLourdes AquinoОценок пока нет
- Circuitos RLC Teoria 2Документ19 страницCircuitos RLC Teoria 2madboterОценок пока нет
- 17 Dispositivos de Disparo Ujt y PutДокумент9 страниц17 Dispositivos de Disparo Ujt y PutRicardo LopezОценок пока нет
- Pds Fase1 2016Документ91 страницаPds Fase1 2016Oz MGОценок пока нет
- Problemas Electronica de PotenciaДокумент1 страницаProblemas Electronica de PotenciaBenjamin Samaniego ErazoОценок пока нет
- Lab 1 de Ing Control I UnacДокумент9 страницLab 1 de Ing Control I Unacsaul100% (1)
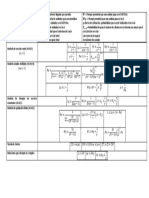
- Fórmulas de Teoría de ColasДокумент1 страницаFórmulas de Teoría de ColasJohary Castiblanco GomezОценок пока нет
- Ecualizador de 6 BandasДокумент4 страницыEcualizador de 6 BandasAlan Lopez100% (1)
- Sistemas Continuos PDFДокумент25 страницSistemas Continuos PDFGuyumusОценок пока нет
- TriacДокумент4 страницыTriacJean Pierre Francisco BarriosОценок пока нет
- Guia de Laboratorio 4 - EE-430 - PARCIALДокумент3 страницыGuia de Laboratorio 4 - EE-430 - PARCIALShiyemi Coaquira RojasОценок пока нет
- GUIA DE LABORATORIO 04 - Circuitos Restador y Amplificador de InstrumentaciónДокумент6 страницGUIA DE LABORATORIO 04 - Circuitos Restador y Amplificador de Instrumentaciónrafael ttitoОценок пока нет
- Temas para Los 6 GruposДокумент6 страницTemas para Los 6 Gruposjesus alainОценок пока нет
- TBJДокумент5 страницTBJErik RojasОценок пока нет
- Consulta RagazziniДокумент7 страницConsulta RagazziniAna Montaño Vizcaíno100% (1)
- Informe 5 de Lab - Cd-ChavezДокумент16 страницInforme 5 de Lab - Cd-ChavezAngelGuerreroОценок пока нет
- Resumen Electrónica Aplicada IIДокумент83 страницыResumen Electrónica Aplicada IIEl GaitaОценок пока нет
- Prop2c PDFДокумент8 страницProp2c PDFRafael SosaОценок пока нет
- Sistema Mecánico TraslacionalДокумент2 страницыSistema Mecánico TraslacionalMario Roberto100% (1)
- Cuaderno MétodosДокумент31 страницаCuaderno MétodosOSCAR ANDRES VASQUEZ GARZONОценок пока нет
- Rectificadores y FiltrosДокумент5 страницRectificadores y FiltrosOmar Sánchez CastañedaОценок пока нет
- Edoc - Pub Matlab Robot Puma 560 1ra EdicionДокумент28 страницEdoc - Pub Matlab Robot Puma 560 1ra EdicionDaniel Santiago Bayas SenisterraОценок пока нет
- IE511 Grupo #10 Guias 401 y 402Документ20 страницIE511 Grupo #10 Guias 401 y 402Quique CastroОценок пока нет
- Solucionario 1er Practica Calificada PDFДокумент5 страницSolucionario 1er Practica Calificada PDFpepefex2612Оценок пока нет
- Informe Electronica II Colector Comun 150hzДокумент4 страницыInforme Electronica II Colector Comun 150hzEdwin Cárdenas FuentesОценок пока нет
- Diodos para Aplicaciones EspecialesДокумент1 страницаDiodos para Aplicaciones Especialesx0businessОценок пока нет
- Levitador MagneticoДокумент17 страницLevitador MagneticoManuell NegreteОценок пока нет
- Laboratorio7 - LQRДокумент17 страницLaboratorio7 - LQRKevin Pelaez CardenasОценок пока нет
- Controlabilidad y ObservabilidadДокумент35 страницControlabilidad y Observabilidaddeaj8710100% (1)
- 6-Control Optimo x1Документ49 страниц6-Control Optimo x1Jorge Daniel Titos EscuderoОценок пока нет
- Variador de VelocidadДокумент26 страницVariador de VelocidadXfrali Medina GuevaraОценок пока нет
- Ejemplo Aplicando Control ÒptimoДокумент5 страницEjemplo Aplicando Control ÒptimoXfrali Medina GuevaraОценок пока нет
- Gestion de La Calidad Ishikawa 6 MДокумент12 страницGestion de La Calidad Ishikawa 6 MXfrali Medina GuevaraОценок пока нет
- Medida de Energía, Potencia y Corrección Del Factor de Potencia en Circuitos MonofásicosДокумент12 страницMedida de Energía, Potencia y Corrección Del Factor de Potencia en Circuitos MonofásicosXfrali Medina GuevaraОценок пока нет
- Control OptimoДокумент49 страницControl OptimoXfrali Medina GuevaraОценок пока нет
- Control Moderno Con RetroalimentaciónДокумент40 страницControl Moderno Con RetroalimentaciónXfrali Medina GuevaraОценок пока нет
- Ubicación de PolosДокумент7 страницUbicación de PolosXfrali Medina GuevaraОценок пока нет
- Controlabilidad y Estabilización en Espacio EstadoДокумент6 страницControlabilidad y Estabilización en Espacio EstadoXfrali Medina GuevaraОценок пока нет
- FUNCCRIДокумент19 страницFUNCCRIXfrali Medina GuevaraОценок пока нет
- Módulo de Comunicaciones Serie RS-232 y RS-485 PDFДокумент5 страницMódulo de Comunicaciones Serie RS-232 y RS-485 PDFAnonymous tCin8XОценок пока нет
- Manual BizagiДокумент94 страницыManual BizagiLeidy Johanna Cardenas SolanoОценок пока нет
- Aportes de Las TIC S para El Diseño GráficoДокумент12 страницAportes de Las TIC S para El Diseño Gráficoppsync_14100% (1)
- IA EducacionДокумент4 страницыIA EducacionAidee84Оценок пока нет
- EntornosДокумент14 страницEntornosapi-3753179Оценок пока нет
- Clase #01 - La Comunicación. Fernando Ponce ArroyoДокумент23 страницыClase #01 - La Comunicación. Fernando Ponce Arroyofernandoponcearroyo4990Оценок пока нет
- Certificación It en Microsoft PowerPoint 2016 + VBA para PowerPoint: Macros and Graphics ExpertДокумент14 страницCertificación It en Microsoft PowerPoint 2016 + VBA para PowerPoint: Macros and Graphics ExpertJesús MorenoОценок пока нет
- Lab2 v0Документ16 страницLab2 v0PIERO MICHAEL ZAMORA ROJASОценок пока нет
- APK (Formato)Документ2 страницыAPK (Formato)José MartinezОценок пока нет
- Competencia 28 y 29Документ8 страницCompetencia 28 y 29EleuterioRafaelAllcaОценок пока нет
- Comunmente Se Define Como RedДокумент2 страницыComunmente Se Define Como RedProfConoОценок пока нет
- EcuДокумент19 страницEcuVíctor Leyva SantosОценок пока нет
- Protocolo para La Prueba de Carga Del Puente DelejercitoДокумент6 страницProtocolo para La Prueba de Carga Del Puente Delejercitochavico17Оценок пока нет
- Resuelve Los Siguientes Sistemas de Ecuaciones Lineales Por SustituciónДокумент10 страницResuelve Los Siguientes Sistemas de Ecuaciones Lineales Por SustituciónAlex Asdasd MC100% (1)
- Tarea 2. Algebra SimbólicaДокумент23 страницыTarea 2. Algebra Simbólicayurely0% (1)
- Plan de AsignaturaДокумент7 страницPlan de AsignaturaDiego100% (1)
- Lab RegresionДокумент27 страницLab RegresionWaly PeñaОценок пока нет
- Simulacion WorbookДокумент133 страницыSimulacion WorbookJorge Luis HernándezОценок пока нет
- Villafañe González Kevin de Jesús: I. Datos PersonalesДокумент4 страницыVillafañe González Kevin de Jesús: I. Datos PersonalesAndrea Carolina MartinezОценок пока нет
- Importancia de Los Sistemas Automatizados de La Informacion para Las Empresas ModernasДокумент6 страницImportancia de Los Sistemas Automatizados de La Informacion para Las Empresas ModernasAsuntos LegalesОценок пока нет
- Apuntes Sap M.F.Документ82 страницыApuntes Sap M.F.Luis Herrera Sandoval0% (1)
- Informe Procesos AutomatizadosДокумент8 страницInforme Procesos AutomatizadosFabricio Pinto SalinasОценок пока нет
- Aporte Pedagógico en La Plataforma MoodleДокумент24 страницыAporte Pedagógico en La Plataforma MoodleJuan UntiverosОценок пока нет
- Control PID-741Документ12 страницControl PID-741evaristoОценок пока нет
- Inventario 05 FebreroДокумент401 страницаInventario 05 Febreromiguel_abreuОценок пока нет
- Requisitos para ConferenciasДокумент3 страницыRequisitos para ConferenciasenriquejsantiagoОценок пока нет
- Estela Leonor Arce Portilla: Entel Perú S.A. Ruc: 20106897914 AV. República de Colombia 791 Piso 14 San Isidro LimaДокумент2 страницыEstela Leonor Arce Portilla: Entel Perú S.A. Ruc: 20106897914 AV. República de Colombia 791 Piso 14 San Isidro LimaJOSE YEP ARCEОценок пока нет
- Manual Trello V1Документ67 страницManual Trello V1Walo MoscolОценок пока нет
- Vampire Spanish ManualДокумент88 страницVampire Spanish ManualMonica Laura Mena Martinez100% (2)
- Sumador Completo 1 Y4 BitsДокумент9 страницSumador Completo 1 Y4 BitsNelson López100% (1)