Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- KDIGO 2023 CKD Guideline Public Review Draft 5 July 2023Документ339 страницKDIGO 2023 CKD Guideline Public Review Draft 5 July 2023oscar coreaОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Wrestling Strength and ConditioningДокумент12 страницWrestling Strength and ConditioningTintin BilatbatОценок пока нет
- CFM Tutorial 5Документ26 страницCFM Tutorial 5Nithin Yadav0% (1)
- Pamphlet InsideДокумент1 страницаPamphlet Insideapi-2408549370% (1)
- (R#1) XQ-450 - 600-800VДокумент121 страница(R#1) XQ-450 - 600-800VFrancisco PestañoОценок пока нет
- Respirator LangmanДокумент10 страницRespirator LangmanSavu MalinaОценок пока нет
- National Federation OF Sugar Workers (NFSW), Petitioner, vs. ETHELWOLDO R. OVEJERA Et. Al., RespondentsДокумент32 страницыNational Federation OF Sugar Workers (NFSW), Petitioner, vs. ETHELWOLDO R. OVEJERA Et. Al., RespondentsRon GawatОценок пока нет
- Multiscale Modeling of Bone Tissue MechanobiologyДокумент12 страницMultiscale Modeling of Bone Tissue MechanobiologyLina AvilaОценок пока нет
- Low Cholesterol DietДокумент10 страницLow Cholesterol Dietkevintotz73Оценок пока нет
- CSA11 CholelithiasisДокумент3 страницыCSA11 CholelithiasisBerlon LacsonОценок пока нет
- Measurement LabДокумент4 страницыMeasurement LabHenessa GumiranОценок пока нет
- WW.04.05 Contraction Stress Test (Oxytocin Challenge Test) PDFДокумент3 страницыWW.04.05 Contraction Stress Test (Oxytocin Challenge Test) PDFDiah Kurniawati100% (1)
- DENSO Diagnostic TipsДокумент1 страницаDENSO Diagnostic TipsVerona MamaiaОценок пока нет
- Chrono Biology SeminarДокумент39 страницChrono Biology SeminarSurabhi VishnoiОценок пока нет
- Homoeopathic Treatment of Complicated Sebaceous Cyst - A Case StudyДокумент5 страницHomoeopathic Treatment of Complicated Sebaceous Cyst - A Case StudyDr deepakОценок пока нет
- Deviance, Crime, and Social ControlДокумент17 страницDeviance, Crime, and Social ControlSaad MaqboolОценок пока нет
- SwivelДокумент29 страницSwivelluisedonossaОценок пока нет
- Tests Conducted On Under Water Battery - YaduДокумент15 страницTests Conducted On Under Water Battery - YadushuklahouseОценок пока нет
- Using Oxidation States To Describe Redox Changes in A Given Reaction EquationДокумент22 страницыUsing Oxidation States To Describe Redox Changes in A Given Reaction EquationkushanОценок пока нет
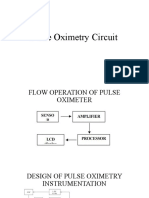
- Pulse Oximetry CircuitДокумент19 страницPulse Oximetry Circuitنواف الجهنيОценок пока нет
- UntitledДокумент8 страницUntitledapi-86749355Оценок пока нет
- Competency Competency Multiple Choice Multiple Choice ComputationДокумент4 страницыCompetency Competency Multiple Choice Multiple Choice ComputationAaron James LicoОценок пока нет
- Aswani Construction R 07102013Документ3 страницыAswani Construction R 07102013Balaji RathinavelОценок пока нет
- Real Time EvaluationДокумент3 страницыReal Time Evaluationأيوب علاءОценок пока нет
- Epigenetics & HomoeopathyДокумент17 страницEpigenetics & HomoeopathyBishal100% (1)
- Disease PreventionДокумент14 страницDisease PreventionJoan InsonОценок пока нет
- Fpubh 10 1079779Документ10 страницFpubh 10 1079779Dona WirdaningsiОценок пока нет
- اطلع علي زتونة 3 ع مراجعة الترم الثاني 2024Документ60 страницاطلع علي زتونة 3 ع مراجعة الترم الثاني 2024ahmad sholokОценок пока нет
- Module 3 Passive Heating 8.3.18Документ63 страницыModule 3 Passive Heating 8.3.18Aman KashyapОценок пока нет
- Assignment 1 Front SheetДокумент9 страницAssignment 1 Front SheetBách PhạmОценок пока нет