Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Nissan Note Power Control SystemДокумент106 страницNissan Note Power Control SystemDaniel Aguirre100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- 2JZGTE VVTI InformationДокумент25 страниц2JZGTE VVTI Informationjonb42100% (1)
- MVI ManualДокумент256 страницMVI ManualNos GoteОценок пока нет
- Service Manual JeepДокумент170 страницService Manual JeepMarone Rohhan50% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- CAT - 3516H Engine Does Not CrankДокумент5 страницCAT - 3516H Engine Does Not Crankwagner_guimarães_1Оценок пока нет
- Chevrolet Aveo Partial WiringДокумент11 страницChevrolet Aveo Partial Wiringeephantom100% (2)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Exhaust Aftertreatment System Fault TracingДокумент5 страницExhaust Aftertreatment System Fault TracingJhonnyVillarroelMendieta50% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- MAN EDC MS6.1 With Exhaust Gas Recirculation EGR (EURO 3)Документ6 страницMAN EDC MS6.1 With Exhaust Gas Recirculation EGR (EURO 3)Mircea Gilca67% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
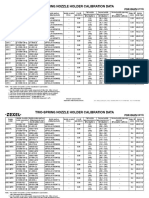
- Zexel Two Spring Nozzle Holder Calibration DataДокумент63 страницыZexel Two Spring Nozzle Holder Calibration DataИльнур Султанов100% (6)
- Stihl 028 Service ManualДокумент20 страницStihl 028 Service ManualJörn Matthaei50% (2)
- Howo 336 Spare Parts ListДокумент42 страницыHowo 336 Spare Parts ListFeroz Gull100% (5)
- Manual Tractor New Holland T4040FДокумент1 199 страницManual Tractor New Holland T4040Fjuanofernandez100% (6)
- Function Button On Retarder Control - Google Search PDFДокумент5 страницFunction Button On Retarder Control - Google Search PDFzeroОценок пока нет
- ECU Wiring AlteaДокумент4 страницыECU Wiring AlteaMocanu Stefan ArtemonОценок пока нет
- Case StudyДокумент2 страницыCase Studyyograj.yogesh100% (1)
- Introduction To Project ManagementДокумент56 страницIntroduction To Project ManagementMuhammad Imran KhanОценок пока нет
- SEDV 615 Environmental Impact Assessment in The Energy Sector H (3-0)Документ1 страницаSEDV 615 Environmental Impact Assessment in The Energy Sector H (3-0)Muhammad Imran KhanОценок пока нет
- A Bottom-Up Methodology To Estimate Vehicle Emissions For The Beijing Urban AreaДокумент7 страницA Bottom-Up Methodology To Estimate Vehicle Emissions For The Beijing Urban AreaMuhammad Imran KhanОценок пока нет
- Research in Transportation Economics: Yutaka Ito, Shunsuke ManagiДокумент12 страницResearch in Transportation Economics: Yutaka Ito, Shunsuke ManagiMuhammad Imran KhanОценок пока нет
- Research in Transportation Economics: Andrea Rusich, Romeo DanielisДокумент14 страницResearch in Transportation Economics: Andrea Rusich, Romeo DanielisMuhammad Imran KhanОценок пока нет
- Energy Conversion and Management: G. Boroumandjazi, B. Rismanchi, R. SaidurДокумент8 страницEnergy Conversion and Management: G. Boroumandjazi, B. Rismanchi, R. SaidurMuhammad Imran KhanОценок пока нет
- Well To Wheel Paper NewДокумент19 страницWell To Wheel Paper NewMuhammad Imran KhanОценок пока нет
- Journal of Public Economics: Thomas Klier, Joshua LinnДокумент23 страницыJournal of Public Economics: Thomas Klier, Joshua LinnMuhammad Imran KhanОценок пока нет
- Energy Policy: Hui-Kuan Tseng, Jy S. Wu, Xiaoshuai LiuДокумент7 страницEnergy Policy: Hui-Kuan Tseng, Jy S. Wu, Xiaoshuai LiuMuhammad Imran KhanОценок пока нет
- Fuel Economy of Hybrid Fuel-Cell Vehicles: Rajesh K. Ahluwalia, X. Wang, A. RousseauДокумент12 страницFuel Economy of Hybrid Fuel-Cell Vehicles: Rajesh K. Ahluwalia, X. Wang, A. RousseauMuhammad Imran KhanОценок пока нет
- Transportation Research Part B: Yu (Marco) Nie, Mehrnaz Ghamami, Ali Zockaie, Feng XiaoДокумент21 страницаTransportation Research Part B: Yu (Marco) Nie, Mehrnaz Ghamami, Ali Zockaie, Feng XiaoMuhammad Imran KhanОценок пока нет
- Fuel Economy of Hydrogen Fuel Cell Vehicles: Rajesh K. Ahluwalia, X. Wang, A. Rousseau, R. KumarДокумент10 страницFuel Economy of Hydrogen Fuel Cell Vehicles: Rajesh K. Ahluwalia, X. Wang, A. Rousseau, R. KumarMuhammad Imran KhanОценок пока нет
- Social Cost-Benefit Analysis of Hydrogen Mobility in Europe: SciencedirectДокумент8 страницSocial Cost-Benefit Analysis of Hydrogen Mobility in Europe: SciencedirectMuhammad Imran KhanОценок пока нет
- Restart of CNG (Compressed Natural Gas) in Europe: Kral VaclavДокумент21 страницаRestart of CNG (Compressed Natural Gas) in Europe: Kral VaclavMuhammad Imran KhanОценок пока нет
- Research On The Controlling of The Thickness Distribution in Superplastic FormingДокумент4 страницыResearch On The Controlling of The Thickness Distribution in Superplastic FormingMuhammad Imran KhanОценок пока нет
- CRL XRD Data of Exhaust Valve Deposit, Sample 1 (2015)Документ24 страницыCRL XRD Data of Exhaust Valve Deposit, Sample 1 (2015)Muhammad Imran KhanОценок пока нет
- World Gas Conference 2012: Martin Brown and Robert JuddДокумент13 страницWorld Gas Conference 2012: Martin Brown and Robert JuddMuhammad Imran KhanОценок пока нет
- Integrated Modeling For Optimized Regional Transportation With Compressed Natural Gas FuelДокумент13 страницIntegrated Modeling For Optimized Regional Transportation With Compressed Natural Gas FuelMuhammad Imran KhanОценок пока нет
- Correlation of Finite Element Analysis To Superplastic Forming ExperimentsДокумент8 страницCorrelation of Finite Element Analysis To Superplastic Forming ExperimentsMuhammad Imran KhanОценок пока нет
- Design and Experimental Validation of A Two-Stage Superplastic Forming DieДокумент9 страницDesign and Experimental Validation of A Two-Stage Superplastic Forming DieMuhammad Imran KhanОценок пока нет
- Journal of Materials Processing TechnologyДокумент9 страницJournal of Materials Processing TechnologyMuhammad Imran KhanОценок пока нет
- The Effect of Strain Rate Sensitivity Evolution On Deformation Stability During Superplastic FormingДокумент4 страницыThe Effect of Strain Rate Sensitivity Evolution On Deformation Stability During Superplastic FormingMuhammad Imran KhanОценок пока нет
- MRT 50 Owner ManualДокумент38 страницMRT 50 Owner ManualOshada GamageОценок пока нет
- Caminhão Fora de Estrada CAT 772Документ4 страницыCaminhão Fora de Estrada CAT 772Tom SouzaОценок пока нет
- Revision - Extra Practice - Vehicles and TransportДокумент2 страницыRevision - Extra Practice - Vehicles and TransportMiquel Capó PayerasОценок пока нет
- Motor Lycoming IO 540 ACДокумент5 страницMotor Lycoming IO 540 ACAngélica Cárdenas100% (2)
- LK 7 - Common Rail SystemДокумент4 страницыLK 7 - Common Rail Systemmurti sapto wahyudiОценок пока нет
- SSP-288 Audi A8 03' Distributed Funktion PDFДокумент32 страницыSSP-288 Audi A8 03' Distributed Funktion PDFRizwan HameedОценок пока нет
- SRKR Engineering College (A), Bhimavaram: Department of Mechanical EngineeringДокумент22 страницыSRKR Engineering College (A), Bhimavaram: Department of Mechanical Engineeringsarath chandra satuluriОценок пока нет
- Skills Training Opportunities Short Intensive Courses For April 2019Документ1 страницаSkills Training Opportunities Short Intensive Courses For April 2019Kalimbwe TutaОценок пока нет
- ENG09-07 - Ignition Coil Air GapДокумент2 страницыENG09-07 - Ignition Coil Air GapCharles KerrОценок пока нет
- SUPER 1803-3 EN 2509980 MPW 1117Документ22 страницыSUPER 1803-3 EN 2509980 MPW 1117chintia nugraheniОценок пока нет
- The Norton CarburetorДокумент3 страницыThe Norton Carburetorbill_wattОценок пока нет
- Vance and Heins Oval SliponsДокумент4 страницыVance and Heins Oval SliponsWeinhoferОценок пока нет
- Ti Cycles of IndiaДокумент24 страницыTi Cycles of Indiagayathrir_23047138Оценок пока нет
- Aeroprakt LTD.: Aeroprakt-22L Illustrated Parts Catalog A22L-IPC-01Документ33 страницыAeroprakt LTD.: Aeroprakt-22L Illustrated Parts Catalog A22L-IPC-01Facundo ArlistanОценок пока нет
- 42U Streme Series Server RackДокумент2 страницы42U Streme Series Server RackJessica HarveyОценок пока нет