Вам также может понравиться
- Airtel Online Prepaid Recharge, Online Mobile RechargeДокумент2 страницыAirtel Online Prepaid Recharge, Online Mobile RechargeSatyakarVeeramalluОценок пока нет
- A Comparative Analysis of Multiloop Voltage Regulation Strategies For Single and Three-Phase UPS SystemsДокумент10 страницA Comparative Analysis of Multiloop Voltage Regulation Strategies For Single and Three-Phase UPS SystemsSatyakarVeeramalluОценок пока нет
- Design of Control Power Supply for High Power ConvertersДокумент63 страницыDesign of Control Power Supply for High Power ConvertersSatyakarVeeramalluОценок пока нет
- F2812 DSP Full TutorialДокумент517 страницF2812 DSP Full Tutorialskesler100% (5)
- A Control Strategy by Instantaneous Average Values For Parallel Operation of Single Phase Voltage Source Inverters Based in The Inductor PDFДокумент8 страницA Control Strategy by Instantaneous Average Values For Parallel Operation of Single Phase Voltage Source Inverters Based in The Inductor PDFSatyakarVeeramalluОценок пока нет
- PDFДокумент14 страницPDFSatyakarVeeramalluОценок пока нет
- Excel Macros TutorialДокумент117 страницExcel Macros TutorialMokete100% (1)
- IGBTs - Unknown - 2010Документ51 страницаIGBTs - Unknown - 2010SatyakarVeeramalluОценок пока нет
- A Control Strategy by Instantaneous Average Values For Parallel Operation of Single Phase Voltage Source Inverters Based in The Inductor PDFДокумент8 страницA Control Strategy by Instantaneous Average Values For Parallel Operation of Single Phase Voltage Source Inverters Based in The Inductor PDFSatyakarVeeramalluОценок пока нет
- Study and Analysis of Three Phase Multilevel Inverter 06Документ54 страницыStudy and Analysis of Three Phase Multilevel Inverter 06gopikumarchОценок пока нет
- Module 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsДокумент55 страницModule 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsFabricioОценок пока нет
- Syllabus: Electrical & Electronics Engineering DepartmentДокумент3 страницыSyllabus: Electrical & Electronics Engineering DepartmentSatyakarVeeramalluОценок пока нет
- Introduction to Multilevel InvertersДокумент53 страницыIntroduction to Multilevel InvertersAnnas QureshiОценок пока нет
- Modeling of PVДокумент25 страницModeling of PVSatyakarVeeramalluОценок пока нет
- How to Stitch an Indian Sari BlouseДокумент9 страницHow to Stitch an Indian Sari BlouseSubramanya RamalingacharyaОценок пока нет
- MatlabДокумент62 страницыMatlabSatyakarVeeramalluОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Bmen3120 Project1 Frequency Selective Circuit 1Документ12 страницBmen3120 Project1 Frequency Selective Circuit 1api-3139933760% (2)
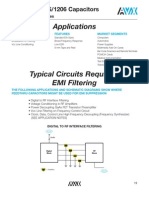
- Applications: Feedthru 0805/1206 CapacitorsДокумент6 страницApplications: Feedthru 0805/1206 CapacitorspblhnrqОценок пока нет
- 23 ElectronicДокумент20 страниц23 Electronicxavier ortizОценок пока нет
- Resonant Circuits and Active Filters: Experiment 5Документ26 страницResonant Circuits and Active Filters: Experiment 5manuОценок пока нет
- Yaesu VX-7R Technical SuplementДокумент58 страницYaesu VX-7R Technical SuplementYayok S. Anggoro100% (2)
- Parasites: Disturbing Hacks For Mutable Instruments ModulesДокумент7 страницParasites: Disturbing Hacks For Mutable Instruments ModulesGiona VintiОценок пока нет
- HP Heater # 2Документ133 страницыHP Heater # 2Kuppan SrinivasanОценок пока нет
- ADS Momentum Tutorial HL KY Final W09Документ18 страницADS Momentum Tutorial HL KY Final W09Pragash SangaranОценок пока нет
- Fuzzy Logic Control For Single Phase Multilevel InverterДокумент6 страницFuzzy Logic Control For Single Phase Multilevel InverterMohan KumarОценок пока нет
- 100AE MK3 Manual v9Документ36 страниц100AE MK3 Manual v9vjОценок пока нет
- 10-RF Electronics Kikkert Ch7 RFFiltersPart2Документ27 страниц10-RF Electronics Kikkert Ch7 RFFiltersPart2AliOucharОценок пока нет
- The Sproutie MK II HF Regen Receiver FiltersДокумент81 страницаThe Sproutie MK II HF Regen Receiver Filtersdetroit_me25530% (1)
- Deca ChoДокумент9 страницDeca ChoTARANGITОценок пока нет
- Dynamic Analysis of Soil-Steel Composite Bridges For High Speed Railway TrafficДокумент103 страницыDynamic Analysis of Soil-Steel Composite Bridges For High Speed Railway Traffickwon777100% (1)
- Ansoft Interdigital CapacitorДокумент18 страницAnsoft Interdigital CapacitorIPC20XXОценок пока нет
- CT34.OM EN - v3 1 PDFДокумент16 страницCT34.OM EN - v3 1 PDFScottRamosОценок пока нет
- MR-JE Catalogue PDFДокумент84 страницыMR-JE Catalogue PDFDivОценок пока нет
- Drives Montado Sempai NelДокумент52 страницыDrives Montado Sempai Nelkvramanan_1Оценок пока нет
- KEY KME-150 Service ManualДокумент53 страницыKEY KME-150 Service Manualjmccall_22100% (1)
- Icepower1000A: 1000W General Purpose Icepower AmplifierДокумент17 страницIcepower1000A: 1000W General Purpose Icepower AmplifierpalprodОценок пока нет
- Instruction Manual: Varispeed-656Dc5Документ71 страницаInstruction Manual: Varispeed-656Dc5Lee LeeОценок пока нет
- Motorola MB100 AmplifierДокумент6 страницMotorola MB100 AmplifierVladimir PeñarandaОценок пока нет
- DC DC Converters Output NoiseДокумент10 страницDC DC Converters Output NoiseMallickarjuna AsОценок пока нет
- M.tech Syllabus 2nd Year MtuДокумент15 страницM.tech Syllabus 2nd Year MturakeshgnitОценок пока нет
- Power Electronics TutorialДокумент147 страницPower Electronics Tutorialdongyu.li1992Оценок пока нет
- Filtros Harmonicos PassivosДокумент6 страницFiltros Harmonicos PassivosNelson ParijósОценок пока нет
- Mil STD 220b Change 1Документ28 страницMil STD 220b Change 1Leonel Losada CardozoОценок пока нет
- 11-Chapter 11 BTS3606 Operating Environment RequirementsДокумент18 страниц11-Chapter 11 BTS3606 Operating Environment RequirementsAldrin Baquilid FernandezОценок пока нет
- DSP Chapter 1Документ4 страницыDSP Chapter 1Anupam SharmaОценок пока нет
- Power Factor Correction and Harmonic Control For DC Drive LoadsДокумент10 страницPower Factor Correction and Harmonic Control For DC Drive LoadsJubair Abu SalehОценок пока нет