Вам также может понравиться
- Manual Softstarter 3RW52 en-US PDFДокумент258 страницManual Softstarter 3RW52 en-US PDFtekhakkoОценок пока нет
- Negative StripДокумент1 страницаNegative StriptekhakkoОценок пока нет
- DriveMotorBasics01 PDFДокумент11 страницDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluОценок пока нет
- Using A CP 443-1 OPC UA As Gateway For Mes/ErpДокумент47 страницUsing A CP 443-1 OPC UA As Gateway For Mes/ErptekhakkoОценок пока нет
- Manual Softstarter 3RW52 en-US PDFДокумент258 страницManual Softstarter 3RW52 en-US PDFtekhakkoОценок пока нет
- ABB Electric Motor Water CooledДокумент147 страницABB Electric Motor Water CooledMoustapha SeyeОценок пока нет
- BR412-ABB Motors GuideДокумент12 страницBR412-ABB Motors GuideaimleorОценок пока нет
- AC Motor SelectionДокумент2 страницыAC Motor SelectiontekhakkoОценок пока нет
- Motor Temperature Ratings: DefinitionsДокумент4 страницыMotor Temperature Ratings: DefinitionstekhakkoОценок пока нет
- Cooling TypesДокумент1 страницаCooling Types123peniscolaОценок пока нет
- White Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2Документ13 страницWhite Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2tekhakkoОценок пока нет
- Big Indian Little IndianДокумент1 страницаBig Indian Little IndianAyshwar VenkateshОценок пока нет
- Avid Avdsb 0031 enДокумент4 страницыAvid Avdsb 0031 entekhakkoОценок пока нет
- Ag-Og Drive KarsilastırmaДокумент13 страницAg-Og Drive KarsilastırmatekhakkoОценок пока нет
- Dahili Mesnet Zolatörleri: Indoor Post InsulatorsДокумент6 страницDahili Mesnet Zolatörleri: Indoor Post InsulatorstekhakkoОценок пока нет
- Drives BasicsДокумент37 страницDrives BasicsNaveen NagarОценок пока нет
- Basics of DrivesДокумент34 страницыBasics of Drivesهاني عسكرОценок пока нет
- Ag-Og Drive KarsilastırmaДокумент13 страницAg-Og Drive KarsilastırmatekhakkoОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- ALPHA Series BETA Series: Ac/Dc Inverter Tig DC InverterДокумент1 страницаALPHA Series BETA Series: Ac/Dc Inverter Tig DC InverterSajjad Rasheed QureshiОценок пока нет
- DT301Документ18 страницDT301Antonio PalomoОценок пока нет
- BS en 61557-11-2009 PDFДокумент24 страницыBS en 61557-11-2009 PDFLinh Truong100% (2)
- Tablero de Interconexión Smart-BoxДокумент12 страницTablero de Interconexión Smart-Boxangela yesli bravo huamanОценок пока нет
- CRST065N08N Datasheet - Moto ElétricaДокумент10 страницCRST065N08N Datasheet - Moto ElétricaDenis OliveiraОценок пока нет
- Basic Lab Question 2021 For Group B Final 2Документ15 страницBasic Lab Question 2021 For Group B Final 2Anikendu MaitraОценок пока нет
- BQ Instruction ManualДокумент33 страницыBQ Instruction ManualLingesОценок пока нет
- GSTP011Документ134 страницыGSTP011José Luis Morán HernándezОценок пока нет
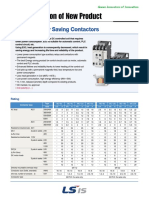
- Introduction of New Product: Meta Energy Saving ContactorsДокумент2 страницыIntroduction of New Product: Meta Energy Saving ContactorsChris AntoniouОценок пока нет
- Electric Electric Electric Electric Fire Pump Fire Pump Fire Pump Fire Pump Motor Motor Motor MotorДокумент18 страницElectric Electric Electric Electric Fire Pump Fire Pump Fire Pump Fire Pump Motor Motor Motor MotorMd. Mahedi HasanОценок пока нет
- BMC6C BMC7D Repair ManualДокумент36 страницBMC6C BMC7D Repair ManualSteven TsangОценок пока нет
- CHW Pump - HotelДокумент7 страницCHW Pump - HotelTiffany CombsОценок пока нет
- IDM96 (N00407) EnglishДокумент5 страницIDM96 (N00407) EnglishDiego CordovaОценок пока нет
- Maint - Check List - Oil Filled TransforsДокумент2 страницыMaint - Check List - Oil Filled TransforsramОценок пока нет
- BSES Training ReportДокумент27 страницBSES Training ReportPooran Chaudhary100% (4)
- Ethiopia Maritime Training Institute CirДокумент48 страницEthiopia Maritime Training Institute CirADDIS JOHNОценок пока нет
- GTP 200kva 2026Документ2 страницыGTP 200kva 2026mahidhar talapaneniОценок пока нет
- STR W6750FДокумент2 страницыSTR W6750FAndres BravoОценок пока нет
- 7SA6 Presentation EnglДокумент29 страниц7SA6 Presentation Englsahil4INDОценок пока нет
- Avlon Silent PilerДокумент1 страницаAvlon Silent PilerDushyantha JayawardenaОценок пока нет
- Terminals For Medium Voltage Cables 50mm - 630mm : Cable ConnectorsДокумент2 страницыTerminals For Medium Voltage Cables 50mm - 630mm : Cable Connectorsmehdi HKОценок пока нет
- 3VA92570HA20 Datasheet enДокумент5 страниц3VA92570HA20 Datasheet enGaurav MaithilОценок пока нет
- Hyundai ContactorsДокумент2 страницыHyundai ContactorsembasianОценок пока нет
- Eti Fuse Catalogue PDFДокумент2 страницыEti Fuse Catalogue PDFErnestОценок пока нет
- GMsetДокумент8 страницGMsetdilo001Оценок пока нет
- GH 2KW Greef Wind Turbine CatalgoueДокумент8 страницGH 2KW Greef Wind Turbine CatalgoueSanjayan MaratОценок пока нет
- TAKO Troubleshooting and IO Board Diagnostic InstructionsДокумент5 страницTAKO Troubleshooting and IO Board Diagnostic Instructionsthanggimme.phanОценок пока нет
- Line Matching Unit For PLC: Features and ApplicationsДокумент2 страницыLine Matching Unit For PLC: Features and ApplicationsLaurentiuОценок пока нет
- DSR 2022Документ155 страницDSR 2022Padmakar RedekarОценок пока нет
- Agc 150 Hybrid Data Sheet 4921240620 UkДокумент24 страницыAgc 150 Hybrid Data Sheet 4921240620 UkIbrahim AL-SORAIHIОценок пока нет