Вам также может понравиться
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Welds of A Fin Plate ConnectionДокумент2 страницыWelds of A Fin Plate Connectioncretz2Оценок пока нет
- Project:-Designed By: - Building: - Checked By: - Element: - Date: - LocationДокумент9 страницProject:-Designed By: - Building: - Checked By: - Element: - Date: - LocationMohammed HanafiОценок пока нет
- Welders Visual Inspection Handbook-2013 WEB PDFДокумент77 страницWelders Visual Inspection Handbook-2013 WEB PDFketanОценок пока нет
- #160 Lifting Fixture 38tons 020807Документ14 страниц#160 Lifting Fixture 38tons 020807halder_kalyan9216Оценок пока нет
- WPS ExampleДокумент2 страницыWPS ExampleMarcio Jr.Оценок пока нет
- Blog Mechguru Com Machine Design Example of Concrete Anchor Bolt Design Calculation Part 6 Determining Concrete Breakout Strength of Anchor in ShearДокумент7 страницBlog Mechguru Com Machine Design Example of Concrete Anchor Bolt Design Calculation Part 6 Determining Concrete Breakout Strength of Anchor in ShearJoel TanОценок пока нет
- Shearing Force & Bending Moment DiagramДокумент17 страницShearing Force & Bending Moment DiagramdearsaswatОценок пока нет
- Moment and Reaction For Rectangular PlatesДокумент4 страницыMoment and Reaction For Rectangular Platesshailendra rathoreОценок пока нет
- Recommended Design Model Beam Welds Design Check No 1 Design Capacity of Flange Welds To Beam - DG11Документ6 страницRecommended Design Model Beam Welds Design Check No 1 Design Capacity of Flange Welds To Beam - DG11perdhana2000Оценок пока нет
- Structural Analysis and Design: STAAD - Pro Steel Design (FAQ)Документ19 страницStructural Analysis and Design: STAAD - Pro Steel Design (FAQ)Suhas NatuОценок пока нет
- Friction Type Connections FullДокумент64 страницыFriction Type Connections FullmohammedОценок пока нет
- Transverse Web Stiffeners and Shear Moment Interation For Steel Plate Girder BridgesДокумент14 страницTransverse Web Stiffeners and Shear Moment Interation For Steel Plate Girder BridgesIvan JovanovicОценок пока нет
- MonorailДокумент14 страницMonorailZain AndabloОценок пока нет
- Stress Strain Laws - Lect05Документ16 страницStress Strain Laws - Lect05Manoj VermaОценок пока нет
- Ur w32Документ14 страницUr w32Rohit KambleОценок пока нет
- 2015 Quality of Computerized Blast Load Simulation For Non-Linear Dynamic Response Analysis of Framed Structures PDFДокумент12 страниц2015 Quality of Computerized Blast Load Simulation For Non-Linear Dynamic Response Analysis of Framed Structures PDFMadhav PurohitОценок пока нет
- Changes in ACI 318 Code Provisions For Earthquake Resistant StructuresДокумент5 страницChanges in ACI 318 Code Provisions For Earthquake Resistant StructuresTrầmLãngОценок пока нет
- Live Load Distribution Factor CalculationsДокумент5 страницLive Load Distribution Factor CalculationsBunkun15Оценок пока нет
- Connection Design ProcedureДокумент3 страницыConnection Design ProcedurewendyОценок пока нет
- Is 5533 1969 PDFДокумент14 страницIs 5533 1969 PDFEvie McKenzie100% (1)
- Optimum Design of Stiffened Plates For Different Loads and Shapes of RibsДокумент15 страницOptimum Design of Stiffened Plates For Different Loads and Shapes of Ribsluke636250Оценок пока нет
- Pin Base ModuleДокумент16 страницPin Base ModuleMd Ahsanul KabirОценок пока нет
- Member Stability CheckДокумент3 страницыMember Stability CheckdamindaОценок пока нет
- Design of HSS and Box Member ConnectionsДокумент88 страницDesign of HSS and Box Member ConnectionszcunОценок пока нет
- NSTS-08307 (Criteria For Preloaded Bolts)Документ38 страницNSTS-08307 (Criteria For Preloaded Bolts)ffontanaОценок пока нет
- Plate Buckling Example - 1 Plate Buckling Example - 1Документ10 страницPlate Buckling Example - 1 Plate Buckling Example - 1MasudОценок пока нет
- Chapter 3. Bolted Connection 3.1 Introductory ConceptsДокумент23 страницыChapter 3. Bolted Connection 3.1 Introductory ConceptsspaceheaterОценок пока нет
- Comentarios-103 - Parte I - English PDFДокумент89 страницComentarios-103 - Parte I - English PDFSakthivel VОценок пока нет
- WeldДокумент7 страницWeldMuhammad Akbar Faereza NugrahaОценок пока нет
- Critical Axial Load For Torsional and Flexural Torsional Buckling ModesДокумент5 страницCritical Axial Load For Torsional and Flexural Torsional Buckling ModesBobaru MariusОценок пока нет
- Shear Failure of Bolted Joints - ME 372 Lab: Bolt DataДокумент1 страницаShear Failure of Bolted Joints - ME 372 Lab: Bolt Databoo huОценок пока нет
- Dessign Specifications For Truss PDFДокумент1 страницаDessign Specifications For Truss PDFDrGanesh KameОценок пока нет
- S FrameДокумент2 страницыS FrameShivam GukhoulОценок пока нет
- Optimization of Piping Layout With Respect To Pressure and Temperature Using Caeser-IiДокумент6 страницOptimization of Piping Layout With Respect To Pressure and Temperature Using Caeser-IichabibОценок пока нет
- Single V Butt Weld With Both Plates Prepped at Same Angle: Select ProcessДокумент1 страницаSingle V Butt Weld With Both Plates Prepped at Same Angle: Select ProcessKiukStaksОценок пока нет
- !! Stability Assessments According To Eurocode 3 PDFДокумент106 страниц!! Stability Assessments According To Eurocode 3 PDFAnonymous hprsT3WlPОценок пока нет
- Specification No: LMB-COI-TRG-001 Rev No. R0 Page ofДокумент16 страницSpecification No: LMB-COI-TRG-001 Rev No. R0 Page ofApoorv MathurОценок пока нет
- Staad BasicsДокумент17 страницStaad BasicsCindy SisonОценок пока нет
- Lifting Lug Stress AnalysisДокумент10 страницLifting Lug Stress AnalysisChaitanya Sai TОценок пока нет
- SpliceДокумент17 страницSpliceSh MNОценок пока нет
- Conversion Tables, Constants, and Material PropertiesДокумент2 страницыConversion Tables, Constants, and Material PropertiesUltraJohn95Оценок пока нет
- European Codes - Steel Design To Eurocode 3 (EN 1993-1-1:2005)Документ7 страницEuropean Codes - Steel Design To Eurocode 3 (EN 1993-1-1:2005)Chong Ting Sheng100% (1)
- PHD Thesis Rakesh Goyal March2015 PDFДокумент227 страницPHD Thesis Rakesh Goyal March2015 PDFNouman IqbalОценок пока нет
- PQR Al 6xxxДокумент7 страницPQR Al 6xxxAmin ThabetОценок пока нет
- Example Workshop Dynamic FatigueДокумент60 страницExample Workshop Dynamic Fatiguesumatrablackcoffee453Оценок пока нет
- Structural - Civil Engineer Mohamed ShafiqeДокумент2 страницыStructural - Civil Engineer Mohamed ShafiqeIngeniero 12Оценок пока нет
- Elastic BucklingДокумент33 страницыElastic BucklingIstvan WunderlichОценок пока нет
- En1991.1-Forklift LoadsДокумент2 страницыEn1991.1-Forklift LoadsColin TanОценок пока нет
- WE-5-2 Fin Plate ConnectionДокумент10 страницWE-5-2 Fin Plate ConnectionPedro AlmeidaОценок пока нет
- Shear Strength of High-Strength BoltsДокумент61 страницаShear Strength of High-Strength Boltsloox600Оценок пока нет
- Chapter 3B. Welded Connections: CE4: Design of Steel Structures - Prof. Dr. A. VarmaДокумент14 страницChapter 3B. Welded Connections: CE4: Design of Steel Structures - Prof. Dr. A. VarmaGОценок пока нет
- Shear Force and Bending Moment DiagramsДокумент2 страницыShear Force and Bending Moment DiagramsJithu AlexanderОценок пока нет
- Fem PDFДокумент65 страницFem PDFManda Ramesh BabuОценок пока нет
- Crimp PLTДокумент5 страницCrimp PLTSai SushankОценок пока нет
- A06 Plate Bending Element With FontsДокумент6 страницA06 Plate Bending Element With FontsSeyhan ÖzenОценок пока нет
- Mohr's CircleДокумент37 страницMohr's CircleMukhtiar Ahmed LakhanОценок пока нет
- VIT - FEM - NAAC - 2D - ScalarДокумент77 страницVIT - FEM - NAAC - 2D - ScalarprasadОценок пока нет
- GVT2Документ7 страницGVT2Victor Hugo BorgesОценок пока нет
- Experimental Modal Analysis: Gaetan Kerschen - Jean-Claude GolinvalДокумент24 страницыExperimental Modal Analysis: Gaetan Kerschen - Jean-Claude Golinvalthrust123Оценок пока нет
- The Fundamentals of Modal TestingДокумент56 страницThe Fundamentals of Modal TestingAsier Tejada OseguiОценок пока нет
- Jacquet-Richardet Et Al-1997-Communications in Numerical Methods in EngineeringДокумент10 страницJacquet-Richardet Et Al-1997-Communications in Numerical Methods in EngineeringVictor Hugo BorgesОценок пока нет
- S.No. Test No. Test Completed Excavation Completed No - of Days For Manual Excavation & Arrangement of Soil BagsДокумент8 страницS.No. Test No. Test Completed Excavation Completed No - of Days For Manual Excavation & Arrangement of Soil BagsKarthikeyan SnОценок пока нет
- ZımparaДокумент8 страницZımparalinaОценок пока нет
- Broadcast BillДокумент22 страницыBroadcast BillLidwin SoundariaОценок пока нет
- GTAG 1 IT Risk and Controls 2nd Edition MarchДокумент36 страницGTAG 1 IT Risk and Controls 2nd Edition MarchCat ValentineОценок пока нет
- JSP BasicsДокумент41 страницаJSP BasicsSandeep KavuriОценок пока нет
- Calibration InstrumnetДокумент14 страницCalibration InstrumnetDwi Mulyanti DwimulyantishopОценок пока нет
- Liebherr Hydraulic Components For Heavy Duty On Highway Engines Application Flyer Es WebДокумент4 страницыLiebherr Hydraulic Components For Heavy Duty On Highway Engines Application Flyer Es WebDaniel Castillo PeñaОценок пока нет
- Stainless Steel Wire Mesh and Wire ClothДокумент3 страницыStainless Steel Wire Mesh and Wire ClothStela LjevarОценок пока нет
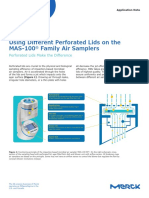
- Using Different Perforated Lids On The MAS-100 Family Air SamplersДокумент6 страницUsing Different Perforated Lids On The MAS-100 Family Air SamplersJuan Salvador MaestreОценок пока нет
- Smart Soot Blower SystemДокумент8 страницSmart Soot Blower SystemidigitiОценок пока нет
- Ponds and Aerated LagoonsДокумент24 страницыPonds and Aerated LagoonsGabriella AngОценок пока нет
- Science 6 Week 2Документ3 страницыScience 6 Week 2Ma. Jennifer MapanooОценок пока нет
- Charpy Impact Test - STP 1072Документ219 страницCharpy Impact Test - STP 1072biancogallazzi100% (3)
- OBIEE GuideДокумент306 страницOBIEE GuideKomal Kandi100% (1)
- RADAR An In-Building RF-Based User Location and Tracking SystemДокумент16 страницRADAR An In-Building RF-Based User Location and Tracking Systemahmaddeny6Оценок пока нет
- Annual Report 2017 English PDFДокумент90 страницAnnual Report 2017 English PDFanand.srajuОценок пока нет
- Edgen Murray ProductsДокумент20 страницEdgen Murray Productsafiqaziz86Оценок пока нет
- FDTP brochure-EC 3354 Signals and Systems 2023Документ2 страницыFDTP brochure-EC 3354 Signals and Systems 2023Principal RVSETGI,DindigulОценок пока нет
- BB Session - Me132p - Lecture 2 KD and DofДокумент31 страницаBB Session - Me132p - Lecture 2 KD and Dofkris garciaОценок пока нет
- Scheduled Power Interruption For April 23-24, 2019Документ1 страницаScheduled Power Interruption For April 23-24, 2019glaiОценок пока нет
- Optical Disc PackagingДокумент30 страницOptical Disc Packagingsameeksha_maury8933Оценок пока нет
- Conductor StringingДокумент5 страницConductor StringingJamie JovellanosОценок пока нет
- Sample Letters To DEPДокумент7 страницSample Letters To DEPSJLibraryОценок пока нет
- Case/Duct System (Automobile)Документ7 страницCase/Duct System (Automobile)Tran xuan ThuyОценок пока нет
- Web Pacs Viewer 2008Документ68 страницWeb Pacs Viewer 2008Devair VieiraОценок пока нет
- KRA List & Responsibility MatrixДокумент1 158 страницKRA List & Responsibility MatrixBheemeshwer Singh MouryaОценок пока нет
- Ditch Excavation Procedure - C01Документ8 страницDitch Excavation Procedure - C01Toreson OfuafoОценок пока нет
- C1107Документ4 страницыC1107Pankaj PaulОценок пока нет
- 200T 5 Pal 001 PDFДокумент27 страниц200T 5 Pal 001 PDFCornelius Price100% (1)
- Ring Smart Lighting Transformer Manual ENДокумент11 страницRing Smart Lighting Transformer Manual ENjust let me download assholeОценок пока нет