Вам также может понравиться
- Chap1 Association Mcc-Convertisseurs Drid2020Документ16 страницChap1 Association Mcc-Convertisseurs Drid2020Mohamed BouОценок пока нет
- TP AsservissementДокумент8 страницTP AsservissementQudýmãt ÁhmèdОценок пока нет
- L'Électricité - Découvreurs et Inventeurs: Tome IVОт EverandL'Électricité - Découvreurs et Inventeurs: Tome IVРейтинг: 3 из 5 звезд3/5 (2)
- Commande D'une Machine CC-GEДокумент121 страницаCommande D'une Machine CC-GEFouad Idsouguou67% (3)
- Variateur de Vitesse D - Un Moteur À Courant ContinuДокумент5 страницVariateur de Vitesse D - Un Moteur À Courant Continuerno785100% (1)
- Travaux Pratiques Commande MAS Commande PDFДокумент31 страницаTravaux Pratiques Commande MAS Commande PDFLEBONGOОценок пока нет
- TP° 02 Linéarisation Autour D'un Point D'équilibreДокумент15 страницTP° 02 Linéarisation Autour D'un Point D'équilibrehassanОценок пока нет
- Commande Du Machine AsynchroneДокумент16 страницCommande Du Machine AsynchroneKhaireddine WeslatiОценок пока нет
- Modélisation - MASДокумент42 страницыModélisation - MASfarid saadОценок пока нет
- Moteur A Courant ContinuДокумент11 страницMoteur A Courant Continusonacome100% (3)
- TP Machine AsynchroneДокумент5 страницTP Machine AsynchroneMohammed Reda GailaОценок пока нет
- Modélisation Des Convertisseurs StatiquesДокумент222 страницыModélisation Des Convertisseurs Statiquesbeladel100% (1)
- TP N1 Master1 ELTДокумент2 страницыTP N1 Master1 ELTMęd Øūd100% (1)
- Simulation Des Machines À Courant Continu Dans L PDFДокумент10 страницSimulation Des Machines À Courant Continu Dans L PDFKa AissaОценок пока нет
- Chapitre 5 Géné À Courant ContinuДокумент20 страницChapitre 5 Géné À Courant Continupasteur1588% (8)
- Moteur À CC À Excitation Séparée 2008Документ11 страницMoteur À CC À Excitation Séparée 2008rado123489% (9)
- La Machine AsynchroneДокумент12 страницLa Machine AsynchroneLamine Ahmed100% (1)
- Redresseur MLI Triphasé de TensionДокумент28 страницRedresseur MLI Triphasé de TensionStar Souf100% (8)
- Generatrices A Courant ContinuДокумент12 страницGeneratrices A Courant ContinuHajri Mohamed100% (2)
- Le Moteur SynchroneДокумент3 страницыLe Moteur SynchroneAhcene Bouzida100% (1)
- PFE (Etude D'une Machine À Réluctance Variable Supraconductrice) PDFДокумент78 страницPFE (Etude D'une Machine À Réluctance Variable Supraconductrice) PDFRom-2 BotchackОценок пока нет
- Onduleur CourantДокумент20 страницOnduleur CourantFATINE BOUKEBBOUОценок пока нет
- Decharge de CouronneДокумент7 страницDecharge de CouronneOussama Mohammad Messadi100% (1)
- Commande MLI de L'onduleur MonophaséДокумент12 страницCommande MLI de L'onduleur Monophaséhaidass100% (3)
- 1.modélisation de La MASДокумент11 страниц1.modélisation de La MASAbdel Illah LbkОценок пока нет
- Moteur AsynchroneДокумент14 страницMoteur AsynchroneAsma usmaОценок пока нет
- Machine A Courant Continu Et AlternatifДокумент22 страницыMachine A Courant Continu Et Alternatifwatsop100% (2)
- Chapitre 4 MAS G15Документ29 страницChapitre 4 MAS G15Coumba Laobė NdiayeОценок пока нет
- TP Electotech Moteur Asynchrone Etoile Et TriangleДокумент7 страницTP Electotech Moteur Asynchrone Etoile Et TriangleIkram Ikram100% (3)
- TP N°2 Amc PDFДокумент5 страницTP N°2 Amc PDFSidali SlimaniОценок пока нет
- Sérié2 HacheursДокумент5 страницSérié2 Hacheursmhys3710Оценок пока нет
- TD3 Machine Asynchrone BISДокумент2 страницыTD3 Machine Asynchrone BISnawzat100% (1)
- Modelisation Des Machines Electriques PDFДокумент20 страницModelisation Des Machines Electriques PDFislambenhamida86% (7)
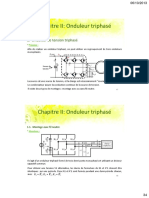
- Onduleurs Triphasés PDFДокумент6 страницOnduleurs Triphasés PDFOmar 95100% (1)
- Chapitre 3Документ18 страницChapitre 3Eya CherbibОценок пока нет
- HacheurДокумент13 страницHacheurLTIMKОценок пока нет
- TP 1 Commande MachinesДокумент6 страницTP 1 Commande MachinesislambenhamidaОценок пока нет
- Cours Commande Scalaire 5 Eme AnnéeДокумент8 страницCours Commande Scalaire 5 Eme Annéenachit01100% (1)
- MCC HacheurДокумент3 страницыMCC Hacheurimen88100% (1)
- Moteur À Courant ContinuДокумент3 страницыMoteur À Courant ContinuFaouzi TlemcenОценок пока нет
- ATTOU Amine Cde Scalaire MASДокумент64 страницыATTOU Amine Cde Scalaire MASAttouAmine100% (1)
- RedresseurДокумент23 страницыRedresseurAnas Kerty50% (4)
- Electronique de PuissanceДокумент30 страницElectronique de PuissanceLina Mira67% (3)
- Cours Onduleur AutonomeДокумент5 страницCours Onduleur Autonomebaboum25Оценок пока нет
- Cours Convertisseur StatiqueДокумент34 страницыCours Convertisseur Statiquerachida zounaibiОценок пока нет
- Cours OnduleurДокумент4 страницыCours OnduleurAymen Chaaira50% (2)
- Chapitre3 Technique de La Commande ÉlectriqueДокумент11 страницChapitre3 Technique de La Commande Électriqueاشر اقОценок пока нет
- Moteurs À Courant ContinuДокумент36 страницMoteurs À Courant ContinuJaouad Diouri100% (1)
- Dimensionnement D Un Systeme D EntrainementДокумент11 страницDimensionnement D Un Systeme D EntrainementbacimovitchОценок пока нет
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueОт EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueОценок пока нет
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesОт EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesОценок пока нет
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueОт EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueОценок пока нет
- L'électricité - Découvreurs et Inventeurs: Tome IIОт EverandL'électricité - Découvreurs et Inventeurs: Tome IIРейтинг: 5 из 5 звезд5/5 (1)
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesОт EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesОценок пока нет
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesОт EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesРейтинг: 2 из 5 звезд2/5 (1)
- Manuel de Decoupage Sous EauДокумент70 страницManuel de Decoupage Sous EauHippolyte NkolonaОценок пока нет
- Comment Realiser Un Filetage Sur Tour - CopieДокумент4 страницыComment Realiser Un Filetage Sur Tour - CopieMakrem Cherif100% (1)
- 2018 171002194618Документ133 страницы2018 171002194618Seif HabbachiОценок пока нет
- Eufy Robovac11 HB FR EsДокумент24 страницыEufy Robovac11 HB FR EsJoseph HdezОценок пока нет
- Tableau Des Coefficients de DémarrageДокумент9 страницTableau Des Coefficients de DémarrageWoody BilОценок пока нет
- Compte Rendu Table RondeДокумент2 страницыCompte Rendu Table RonderoeschОценок пока нет
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFДокумент5 страницDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- La Revolution Industrielle Et Ses ConstructionsДокумент12 страницLa Revolution Industrielle Et Ses ConstructionsMarieОценок пока нет
- OneWay - Contrepointe.Remplacement de Roulements en FrançaisДокумент15 страницOneWay - Contrepointe.Remplacement de Roulements en FrançaisBobyОценок пока нет
- 03 - Kit D'installation Répéteur Indoor 3 AntennesДокумент7 страниц03 - Kit D'installation Répéteur Indoor 3 AntennesMiradoniainaRakotoarimananaОценок пока нет
- Tassement Du SolДокумент5 страницTassement Du SolSaid EssahriОценок пока нет
- Cours - Carburants 2018 PDFДокумент66 страницCours - Carburants 2018 PDFJawher Salem100% (1)
- Catalogue GSL Avec Liens 103Документ1 страницаCatalogue GSL Avec Liens 103Tantely RazafimahatratraОценок пока нет
- Guidage en Translation StratégieДокумент4 страницыGuidage en Translation StratégieakouОценок пока нет
- Rapport de Stage Du Urbine A GazДокумент29 страницRapport de Stage Du Urbine A GazMag DzОценок пока нет
- ThèseДокумент185 страницThèsertyОценок пока нет
- 13 RegulationДокумент12 страниц13 RegulationAnonymous LfeGI2hMОценок пока нет
- HSE-FR-03-00 Analyse Environnemental V00Документ15 страницHSE-FR-03-00 Analyse Environnemental V00Saddem Hadfi0% (1)
- Le MortierДокумент34 страницыLe MortierCécé Charles KoliéОценок пока нет
- Bosch SHX33A05UC 14 PDFДокумент63 страницыBosch SHX33A05UC 14 PDFDawei LanОценок пока нет
- 2016 - Lecture Wind Energy Turbines Conversion PDFДокумент15 страниц2016 - Lecture Wind Energy Turbines Conversion PDFIMAОценок пока нет
- Liste Des Materiels ExtensionДокумент28 страницListe Des Materiels ExtensiontambaОценок пока нет
- Catalogue Formation SCALIAN SIMULIA 2018Документ77 страницCatalogue Formation SCALIAN SIMULIA 2018Samagassi SouleymaneОценок пока нет
- Chapitre - Les Bétons Et MortiersДокумент29 страницChapitre - Les Bétons Et MortiersGaitan Neungoue100% (1)
- Rapport Déformation Elements PorteursДокумент2 страницыRapport Déformation Elements PorteursAbdelaziz LouraouiОценок пока нет
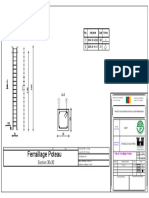
- Ferraillage Poteau PDFДокумент1 страницаFerraillage Poteau PDFGael Noé Tjomb100% (1)
- Rapport de Stage Sur Les Analyses Des Carburants (NAFTAL)Документ35 страницRapport de Stage Sur Les Analyses Des Carburants (NAFTAL)kader83% (46)