Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Datasheet: 3+1 Voltage Regulator For Imvp-7/Vr12 CpusДокумент2 страницыDatasheet: 3+1 Voltage Regulator For Imvp-7/Vr12 CpusChristian NatanaelОценок пока нет
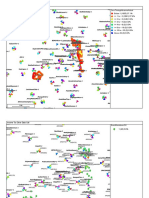
- 2G Drive Test Plot - Sites Serving IT DeptДокумент4 страницы2G Drive Test Plot - Sites Serving IT DeptRavi ShuklaОценок пока нет
- Kerala electrical contractors license classes A, B, C requirementsДокумент2 страницыKerala electrical contractors license classes A, B, C requirementsJayaprakash GОценок пока нет
- Introducing Samsung DVD Recorder (DVD-R128 - R129)Документ74 страницыIntroducing Samsung DVD Recorder (DVD-R128 - R129)tomverstratenОценок пока нет
- Setting Crossovers in An AVR - Pre-Pro With Dirac Live 2 Room CorrectionДокумент5 страницSetting Crossovers in An AVR - Pre-Pro With Dirac Live 2 Room CorrectionstudskirbyОценок пока нет
- Emf Equation of AlternatorДокумент2 страницыEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreОценок пока нет
- BEL - Organisational Chart PDFДокумент2 страницыBEL - Organisational Chart PDFnitinnang50% (2)
- Quantum PhysicsДокумент65 страницQuantum PhysicsAnonymous CUfCep0VОценок пока нет
- KL3045Документ9 страницKL3045Bruna RamosОценок пока нет
- Solve yarn breaks and maximize profits with Muratec's Pac21 winding systemДокумент22 страницыSolve yarn breaks and maximize profits with Muratec's Pac21 winding systemShahjad Mansuri85% (26)
- Lab 7Документ8 страницLab 7Tomas Rodriguez RamirezОценок пока нет
- Owner's Manual: Bridgeable Power AmplifierДокумент64 страницыOwner's Manual: Bridgeable Power AmplifiervanderleySCLОценок пока нет
- Registrador TR3000Документ4 страницыRegistrador TR3000ParramanuelОценок пока нет
- Atys C25 Instruction Manual - Instruction Manual - 2020 01 - 549780 - en IДокумент40 страницAtys C25 Instruction Manual - Instruction Manual - 2020 01 - 549780 - en IDwi WinarkoОценок пока нет
- Jump and CarryДокумент8 страницJump and CarryeekeekeekeekОценок пока нет
- UVCE BE 1 Yr CBCS SyllabusДокумент42 страницыUVCE BE 1 Yr CBCS SyllabusMohammed DanishОценок пока нет
- Uniwill U40ii1 - MB RC 1207 (37gu41000-10) U40ii1 MB RC 0104Документ33 страницыUniwill U40ii1 - MB RC 1207 (37gu41000-10) U40ii1 MB RC 0104sousalrОценок пока нет
- SN54390, SN54LS390, SN54393, SN54LS393 SN74390, SN74LS390, SN74393, SN74LS393 Dual 4-Bit Decade and Binary CountersДокумент30 страницSN54390, SN54LS390, SN54393, SN54LS393 SN74390, SN74LS390, SN74393, SN74LS393 Dual 4-Bit Decade and Binary CountersAllan J. HernandezОценок пока нет
- Leoni Whitepaper 11.2016Документ4 страницыLeoni Whitepaper 11.2016Rita MizarniОценок пока нет
- Definition of operating modes and transmission fault codesДокумент22 страницыDefinition of operating modes and transmission fault codesAhmetОценок пока нет
- E - Catalogue - 24-9-2014Документ19 страницE - Catalogue - 24-9-2014Juan MontufarОценок пока нет
- Area Ratio and Stencil Thickness CalculatorДокумент6 страницArea Ratio and Stencil Thickness Calculatorsmtdrkd100% (1)
- Philips 32PFL3403D-27 - Manual y Circuito Chasis TPM1.2UДокумент62 страницыPhilips 32PFL3403D-27 - Manual y Circuito Chasis TPM1.2URoberto GeselinoОценок пока нет
- Hwuaei Es1201 ManualДокумент30 страницHwuaei Es1201 ManualAnonymous fnFwazyIОценок пока нет
- Sps0650en Poka YokeДокумент8 страницSps0650en Poka Yokepatima_sv4875Оценок пока нет
- BeoLab 8000 Setup GuideДокумент8 страницBeoLab 8000 Setup GuidewatchabcОценок пока нет
- Microprocessors Unit IIДокумент47 страницMicroprocessors Unit IISheikh Noor MohammadОценок пока нет
- Combustion Analyzer Instruction ManualДокумент108 страницCombustion Analyzer Instruction ManualalperbogaОценок пока нет
- Copeland CRN5 0500 PFV 970 Submittal SheetДокумент1 страницаCopeland CRN5 0500 PFV 970 Submittal SheetAronis serranoОценок пока нет
- Editor Hfe Series: X-Ray Generators For Diagnostic RadiographyДокумент4 страницыEditor Hfe Series: X-Ray Generators For Diagnostic RadiographyMonooBbuinoОценок пока нет