Вам также может понравиться
- CoDeSys Manual V2p3Документ388 страницCoDeSys Manual V2p3Akula VeerrajuОценок пока нет
- CoDeSys Manual V2p3Документ388 страницCoDeSys Manual V2p3Akula VeerrajuОценок пока нет
- Devices PreparationДокумент70 страницDevices Preparationaditya naik100% (1)
- Interview Questions for IBM Mainframe DevelopersОт EverandInterview Questions for IBM Mainframe DevelopersРейтинг: 1 из 5 звезд1/5 (1)
- Canna DispensariesДокумент35 страницCanna DispensariesWaf Etano100% (1)
- RA For Installation & Dismantling of Loading Platform A69Документ15 страницRA For Installation & Dismantling of Loading Platform A69Sajid ShahОценок пока нет
- Canbus Example: Product DescriptionДокумент10 страницCanbus Example: Product DescriptionNda SmuОценок пока нет
- Interrupts/Polling and Input/Output With The DSK Codec: Pre-LabДокумент4 страницыInterrupts/Polling and Input/Output With The DSK Codec: Pre-LabrkОценок пока нет
- BuflabДокумент11 страницBuflabtlrsbillyОценок пока нет
- BER Coding SchemesДокумент3 страницыBER Coding SchemesAnonymous Th1S33Оценок пока нет
- Simulate ECU Network with CANoe & CANalyzerДокумент3 страницыSimulate ECU Network with CANoe & CANalyzerrizwan54549Оценок пока нет
- GBC 002 E0 0 GSM Radio Technology-33Документ33 страницыGBC 002 E0 0 GSM Radio Technology-33Muad YassinОценок пока нет
- InteliMainsNT 3.0.3 Release NotesДокумент11 страницInteliMainsNT 3.0.3 Release NotesJesus ChaileОценок пока нет
- Turbo CodeДокумент12 страницTurbo CodeVikas PsОценок пока нет
- MODBUS Map For GRP 5 and PWR MGR 381339 - 221IДокумент22 страницыMODBUS Map For GRP 5 and PWR MGR 381339 - 221ISameeullahОценок пока нет
- Visual Basic Concepts Visual Studio 6.0 Using The Communications ControlДокумент5 страницVisual Basic Concepts Visual Studio 6.0 Using The Communications ControlInsan Rizal Bakti KomaraОценок пока нет
- CANOpen and CoDeSys PBF Part 1 - Basic FunctionsДокумент15 страницCANOpen and CoDeSys PBF Part 1 - Basic FunctionsgiusssyОценок пока нет
- 221C Conectividad G5 Control PanelДокумент21 страница221C Conectividad G5 Control PanelJose PirulliОценок пока нет
- Canking - Can Simulation Software: EX. NO.1.B 02-07-2019Документ6 страницCanking - Can Simulation Software: EX. NO.1.B 02-07-2019ERTS 2k19-21Оценок пока нет
- CR Channel Notching v13 3Документ3 страницыCR Channel Notching v13 3kanagaraj2331993Оценок пока нет
- MOTORTECH Manual DetCon CAN Bus Communication 01.30.010 en 2016 08 WEBДокумент12 страницMOTORTECH Manual DetCon CAN Bus Communication 01.30.010 en 2016 08 WEBReza NadianОценок пока нет
- MB - Master - User Guide PDFДокумент21 страницаMB - Master - User Guide PDFjulio cesar ramirez gonzalezОценок пока нет
- Buflab cs3214 Fall12Документ12 страницBuflab cs3214 Fall12Lakshman SwaroopОценок пока нет
- Lecture 2Документ20 страницLecture 2Esraa SamirОценок пока нет
- University Automoma of Queretaro Engineering Faculty: Digital System 2Документ15 страницUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- AN2004-RF67 Communication ExampleДокумент11 страницAN2004-RF67 Communication ExamplerenampОценок пока нет
- Au Infiniband PDFДокумент8 страницAu Infiniband PDFshino910jОценок пока нет
- CAN TutorialДокумент22 страницыCAN TutorialApoorva BhattОценок пока нет
- CAN TutorialДокумент22 страницыCAN TutorialNaveen BasavarajacharОценок пока нет
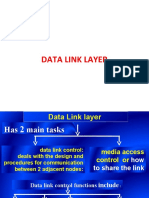
- 2.1 Data Link Layer 2.2 Error Detection 2.3 Error Correction 2.4 Flow ControlДокумент51 страница2.1 Data Link Layer 2.2 Error Detection 2.3 Error Correction 2.4 Flow ControlSebhat MengistОценок пока нет
- COIN-OR Branch-and-Cut: Short Guide To The Command Line InterfaceДокумент13 страницCOIN-OR Branch-and-Cut: Short Guide To The Command Line InterfaceJuan Pablo CantillanaОценок пока нет
- Assign 3Документ5 страницAssign 3api-252659046Оценок пока нет
- CAB202 Tutorial 7 - v2 PDFДокумент7 страницCAB202 Tutorial 7 - v2 PDFAki Su'aОценок пока нет
- Naudio: Low Latency Audio Recording, Such As That Found in Digital Audio Workstation Software Used inДокумент13 страницNaudio: Low Latency Audio Recording, Such As That Found in Digital Audio Workstation Software Used indharshbtechОценок пока нет
- ADPCM ImplementationДокумент13 страницADPCM ImplementationDumitru GheorgheОценок пока нет
- CoffeДокумент13 страницCoffeCharan C GОценок пока нет
- 6.111 Final Project Proposal: Venkat Chandar and Ben Gelb November 4, 2005Документ7 страниц6.111 Final Project Proposal: Venkat Chandar and Ben Gelb November 4, 2005einu_1Оценок пока нет
- Kumar S. Golla 4/10/2010Документ51 страницаKumar S. Golla 4/10/2010rampravesh kumarОценок пока нет
- How to Override Virtual Fibre Channel Client WWPNДокумент3 страницыHow to Override Virtual Fibre Channel Client WWPNsatОценок пока нет
- Mod 5 Book 2 Computers Fiber Optics, Esds Flight InstrumentsДокумент99 страницMod 5 Book 2 Computers Fiber Optics, Esds Flight Instrumentsranjit prasadОценок пока нет
- Automotive BasicsДокумент62 страницыAutomotive BasicsSheshanth AmbekarОценок пока нет
- 11 Comm Sys Des 0809 PDFДокумент15 страниц11 Comm Sys Des 0809 PDFSu KoshОценок пока нет
- Mavlink For Dummiespart1 v.1.1Документ8 страницMavlink For Dummiespart1 v.1.1ajith shettyОценок пока нет
- AN197Документ14 страницAN197Mayowa AdelekunОценок пока нет
- Coping With Bit Errors Using Error Correction Codes: HapterДокумент19 страницCoping With Bit Errors Using Error Correction Codes: Hapterrafael ribasОценок пока нет
- HM 10 As Ibeacon PDFДокумент9 страницHM 10 As Ibeacon PDFRanković NebojšaОценок пока нет
- Whole Genome ReportДокумент16 страницWhole Genome ReportnhbachОценок пока нет
- Computer Solutions LTD: CAN - A Brief TutorialДокумент7 страницComputer Solutions LTD: CAN - A Brief Tutorialhitech_emi3591Оценок пока нет
- Serial Driver Wago ControllersДокумент16 страницSerial Driver Wago ControllersFredyMirreОценок пока нет
- Open ComalДокумент40 страницOpen ComalBenjamin CulkinОценок пока нет
- GB_BT1002_E01_0 GSM Radio Interface Technology 33Документ30 страницGB_BT1002_E01_0 GSM Radio Interface Technology 33noumizredhaОценок пока нет
- Voice Verification Literature Survey ReportДокумент12 страницVoice Verification Literature Survey ReportRana Mohammad BilalОценок пока нет
- CANToolДокумент10 страницCANToolandrec030698Оценок пока нет
- Study Materials - Denoising AutoencodersДокумент7 страницStudy Materials - Denoising AutoencodersDhaarani PushpamОценок пока нет
- Abis UtilizationДокумент4 страницыAbis UtilizationMudassir HussainОценок пока нет
- SSS ModBus Lib Description EДокумент9 страницSSS ModBus Lib Description Edavid reyesОценок пока нет
- Serial Port CommunicationДокумент4 страницыSerial Port CommunicationAshPan123100% (1)
- Serial WinДокумент4 страницыSerial WinFrancisco Ochoa Bueno100% (1)
- Matlab 6713Документ15 страницMatlab 6713ameiyappan5697Оценок пока нет
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkОт EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkОценок пока нет
- Reading Comprehension and Vocabulary PracticeДокумент6 страницReading Comprehension and Vocabulary PracticeIsaias MartinezОценок пока нет
- SBSI Baustein Demo DescriptionДокумент6 страницSBSI Baustein Demo DescriptionIsaias MartinezОценок пока нет
- TST 20pa 2001 20cmsx 20workshopДокумент17 страницTST 20pa 2001 20cmsx 20workshopIsaias MartinezОценок пока нет
- Air Preparation and MS-SV-ASi-Safety at Work - Ipt2010 - 26.07.2010Документ88 страницAir Preparation and MS-SV-ASi-Safety at Work - Ipt2010 - 26.07.2010Isaias MartinezОценок пока нет
- Swagwelok Doc BValves English PDFДокумент12 страницSwagwelok Doc BValves English PDFIsaias MartinezОценок пока нет
- CoDeSys SoftMotion V23 EДокумент148 страницCoDeSys SoftMotion V23 EIsaias MartinezОценок пока нет
- Festo SMTP Library DocumentationДокумент9 страницFesto SMTP Library DocumentationIsaias MartinezОценок пока нет
- Discontinued Parts ListДокумент678 страницDiscontinued Parts ListIsaias MartinezОценок пока нет
- An Overview of Data Communication Options in LabVIEWДокумент65 страницAn Overview of Data Communication Options in LabVIEWIsaias MartinezОценок пока нет
- Making Labview Look Like An Ioc: Kay-Uwe Kasemir, Lanl May 2002Документ13 страницMaking Labview Look Like An Ioc: Kay-Uwe Kasemir, Lanl May 2002Isaias MartinezОценок пока нет
- Discontinued Parts ListДокумент678 страницDiscontinued Parts ListIsaias MartinezОценок пока нет
- DENSO Manual CastellanoДокумент692 страницыDENSO Manual CastellanoJulianna LizcanoОценок пока нет
- Symbol Configuration With Codesys3.5.7Документ6 страницSymbol Configuration With Codesys3.5.7Isaias MartinezОценок пока нет
- Generate Symbolfile with CoDeSys 3.5.0Документ5 страницGenerate Symbolfile with CoDeSys 3.5.0Isaias MartinezОценок пока нет
- Procedure For Configuring GD CommunicationsДокумент9 страницProcedure For Configuring GD Communicationsacpi87Оценок пока нет
- Documentation Host Connection Profinet Anybus ConverterДокумент17 страницDocumentation Host Connection Profinet Anybus ConverterIsaias MartinezОценок пока нет
- STL FestoДокумент117 страницSTL FestoRenzo Delgado100% (2)
- Calculo VectorialДокумент1 страницаCalculo VectorialIsaias MartinezОценок пока нет
- Microchip 18F877 DatasheetДокумент218 страницMicrochip 18F877 DatasheetberetyОценок пока нет
- GuideДокумент2 страницыGuideMaissyОценок пока нет
- Ceeshsworkingstudents Abm Group2Документ18 страницCeeshsworkingstudents Abm Group2kzz9c5hqrwОценок пока нет
- Tendernotice 2Документ20 страницTendernotice 2VIVEK SAINIОценок пока нет
- How To Calibrate OscilloscopeДокумент2 страницыHow To Calibrate OscilloscopeninoОценок пока нет
- EDIBLE VACCINES: A COST-EFFECTIVE SOLUTIONДокумент21 страницаEDIBLE VACCINES: A COST-EFFECTIVE SOLUTIONPritish SareenОценок пока нет
- Moment Influence Line LabsheetДокумент12 страницMoment Influence Line LabsheetZAXОценок пока нет
- MF-QA-001 PDIR ReportДокумент2 страницыMF-QA-001 PDIR ReportBHUSHAN BAGULОценок пока нет
- Tutorial Backpropagation Neural NetworkДокумент10 страницTutorial Backpropagation Neural NetworkHeru PraОценок пока нет
- Rhetorical Analysis ArticleДокумент6 страницRhetorical Analysis Articleapi-242472728Оценок пока нет
- Trishasti Shalaka Purusa Caritra 4 PDFДокумент448 страницTrishasti Shalaka Purusa Caritra 4 PDFPratik ChhedaОценок пока нет
- Recent Developments in Ultrasonic NDT Modelling in CIVAДокумент7 страницRecent Developments in Ultrasonic NDT Modelling in CIVAcal2_uniОценок пока нет
- Lazo v. Judge TiongДокумент9 страницLazo v. Judge TiongKing BadongОценок пока нет
- Monthly Business ReviewДокумент36 страницMonthly Business Reviewmdipu5_948971128Оценок пока нет
- IntuitionДокумент10 страницIntuitionmailsonОценок пока нет
- Writing A Formal Letter To The PresidentДокумент1 страницаWriting A Formal Letter To The PresidentPiaAnaisОценок пока нет
- Kanavos Pharmaceutical Distribution Chain 2007 PDFДокумент121 страницаKanavos Pharmaceutical Distribution Chain 2007 PDFJoao N Da SilvaОценок пока нет
- S 212 Pre Course WorkДокумент5 страницS 212 Pre Course Workafiwierot100% (2)
- 740 (Q50, V40, Awa 4Документ10 страниц740 (Q50, V40, Awa 4rawat2583Оценок пока нет
- Filler SlabДокумент4 страницыFiller Slabthusiyanthanp100% (1)
- Biotox Gold 2.0-2021 Relaunch ReviewДокумент6 страницBiotox Gold 2.0-2021 Relaunch ReviewChinthaka AbeygunawardanaОценок пока нет
- 02 - Order Quantities When Demand Is Approximately LevelДокумент2 страницы02 - Order Quantities When Demand Is Approximately Levelrahma.samyОценок пока нет
- Writing Simple Sentences to Describe ScenariosДокумент5 страницWriting Simple Sentences to Describe Scenariosepol67% (3)
- FED - Summer Term 2021Документ18 страницFED - Summer Term 2021nani chowdaryОценок пока нет
- Historical Source Author Date of The Event Objective of The Event Persons Involved Main ArgumentДокумент5 страницHistorical Source Author Date of The Event Objective of The Event Persons Involved Main ArgumentMark Saldie RoncesvallesОценок пока нет
- Practical Finite Element Simulations With SOLIDWORKS 2022Документ465 страницPractical Finite Element Simulations With SOLIDWORKS 2022knbgamageОценок пока нет
- OsmanabadДокумент5 страницOsmanabadKirankumar MutnaliОценок пока нет
- Direction: Read The Questions Carefully. Write The Letters of The Correct AnswerДокумент3 страницыDirection: Read The Questions Carefully. Write The Letters of The Correct AnswerRomyross JavierОценок пока нет
- How To Install Windows XP From Pen Drive Step by Step GuideДокумент3 страницыHow To Install Windows XP From Pen Drive Step by Step GuideJithendra Kumar MОценок пока нет