Вам также может понравиться
- T.P 02 (V2) CorrigésДокумент4 страницыT.P 02 (V2) CorrigésMrnadhir Mecanique100% (1)
- Act 1-3Документ6 страницAct 1-3becem50% (2)
- 02-Poupee Mobile CorrigeДокумент5 страниц02-Poupee Mobile CorrigeElmouden Mustapha75% (8)
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineДокумент8 страницDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- Corrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MДокумент5 страницCorrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MArfaoui Aymen100% (1)
- TD Sur Les Embrayage - FreinДокумент5 страницTD Sur Les Embrayage - Freingerard correa86% (7)
- Exercice Limiteur de CoupleДокумент4 страницыExercice Limiteur de CoupleMortadha Rabah100% (1)
- Guidage en Translation PDFДокумент141 страницаGuidage en Translation PDFkharrat samir100% (1)
- Devoir de Controle N°2Документ8 страницDevoir de Controle N°2yves100% (2)
- TD6 Schéma Ciné Touret À MeulerДокумент2 страницыTD6 Schéma Ciné Touret À MeulerHamza Elallam100% (7)
- Fraiseuse AutomatiqueДокумент6 страницFraiseuse AutomatiqueJawher Salem100% (1)
- Evaluation - Ajustements - Vrin Bosch - LvesДокумент6 страницEvaluation - Ajustements - Vrin Bosch - Lveskililibenali100% (1)
- Embrayages Frein 10 11 12Документ7 страницEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Unité de Bouchonnage de FlaconsДокумент4 страницыUnité de Bouchonnage de FlaconsAbderrazak MiassarОценок пока нет
- TD Palan Électrique À Chaine1Документ2 страницыTD Palan Électrique À Chaine1Ncib_Mohsen_468383% (6)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Документ6 страницDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- Révision Engrenage 2020Документ15 страницRévision Engrenage 2020Yosr Ben SaidОценок пока нет
- Schéma Cinématique - 2020Документ4 страницыSchéma Cinématique - 2020Mohsen LaabidiОценок пока нет
- 3 Exercice EngrenageДокумент9 страниц3 Exercice EngrenageDhibMohamed0% (2)
- TD Limiteur de CoupleДокумент2 страницыTD Limiteur de CoupleHamami Aymen100% (2)
- TP Etau À Ventouse ProfДокумент5 страницTP Etau À Ventouse Profmidoun100% (2)
- Capteur PneumatiqueДокумент6 страницCapteur Pneumatiquemom bakkouch100% (1)
- CorrectionДокумент5 страницCorrectionAdil Hassani Idrissi100% (3)
- Stat Graph Porte Autobus1Документ4 страницыStat Graph Porte Autobus1Antoine BrndОценок пока нет
- Guidage en TranslationДокумент11 страницGuidage en TranslationMohamed Slim KHACHROUMI50% (2)
- Exercice - Dispositif de Levage Et Basculement - CorrigДокумент6 страницExercice - Dispositif de Levage Et Basculement - CorrigKarina Kapour80% (5)
- Cours Systemes de Transmission de MouvementДокумент5 страницCours Systemes de Transmission de MouvementdjalikadjouОценок пока нет
- 0 - Activité 3Документ6 страниц0 - Activité 3Kamel TayahiОценок пока нет
- 26 Liaison ComplèteДокумент20 страниц26 Liaison ComplèteFarouk Keniou100% (1)
- 07-TD Modelisation Des Liaisons-EДокумент5 страниц07-TD Modelisation Des Liaisons-EMed Aymen BensalemОценок пока нет
- Epreuve 2e Seq Mecanique Appliquee TF3Документ2 страницыEpreuve 2e Seq Mecanique Appliquee TF3kaka kaladzeОценок пока нет
- TP3 Borne Réglable sujet+MEP PDFДокумент8 страницTP3 Borne Réglable sujet+MEP PDFdiopОценок пока нет
- TD ConstructionДокумент6 страницTD ConstructionYoussef TrimechОценок пока нет
- Série Guidage en Rotation PDFДокумент7 страницSérie Guidage en Rotation PDFTaieb BentaherОценок пока нет
- Correction (Chariot Longitudinal) (Act 2-3)Документ1 страницаCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
- Fonction AssemblageДокумент32 страницыFonction AssemblageyahyaouiОценок пока нет
- Meule À MainДокумент2 страницыMeule À MainHamza 01100% (1)
- Roulement BCДокумент6 страницRoulement BCOtman OtoОценок пока нет
- Fonction Guidage en Rotation Par RoulementДокумент4 страницыFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Calcul Durée de Vie Des Roulements V2Документ6 страницCalcul Durée de Vie Des Roulements V2PLAKOST & CIEОценок пока нет
- Perceuse Sensitive Oyaka Nyemb Nyobe EbolembabgДокумент14 страницPerceuse Sensitive Oyaka Nyemb Nyobe Ebolembabgngouo75% (4)
- Bride Serrage RapideДокумент3 страницыBride Serrage RapideRedaAbdraouf0% (2)
- DS1 Scie Sauteuse 2010Документ4 страницыDS1 Scie Sauteuse 2010mecaniquesti100% (1)
- TD2 - Accouplement - Correction Inverseur de MarcheДокумент6 страницTD2 - Accouplement - Correction Inverseur de MarcheAbdelkhalek SaidiОценок пока нет
- Chapitre 4 Les Contraintes DanterioriteДокумент13 страницChapitre 4 Les Contraintes DanterioriteTouhemi Ben Sadok100% (1)
- Exercice Limiteur de Couple Transmissible ÉèveДокумент2 страницыExercice Limiteur de Couple Transmissible Éèvemohamed1101Оценок пока нет
- TD Vérin Rotatif Amorti ÉlèveДокумент5 страницTD Vérin Rotatif Amorti ÉlèveZAEKHK ZEIGZA100% (2)
- AF2 ActivitésДокумент24 страницыAF2 ActivitésArmand EssОценок пока нет
- T.P 02 (V2) D RДокумент5 страницT.P 02 (V2) D RMrnadhir MecaniqueОценок пока нет
- System de Déplacement de Table de Machine À RainurerДокумент63 страницыSystem de Déplacement de Table de Machine À RainurerSalma BouijiОценок пока нет
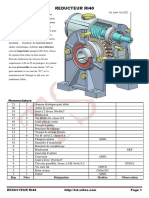
- Reducteur RI40Документ6 страницReducteur RI40watsop75% (4)
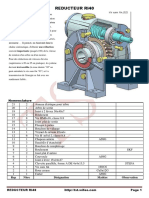
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieДокумент6 страницREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- TP1-Correction TPДокумент3 страницыTP1-Correction TPMzoughi HaythemОценок пока нет
- Technique CДокумент9 страницTechnique Caziz hajriОценок пока нет
- Analyse + Ensemble 2023Документ7 страницAnalyse + Ensemble 2023hamrouniОценок пока нет
- Technique CДокумент8 страницTechnique CKarim FathiОценок пока нет
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeДокумент6 страницEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriОценок пока нет
- TP4-2 GM WinchДокумент5 страницTP4-2 GM WinchDABAKH LDEEBOYОценок пока нет
- DC3 4ScT (15-16) (1) Corr Cremaillère XДокумент8 страницDC3 4ScT (15-16) (1) Corr Cremaillère XWagih MrassiОценок пока нет
- Exercice Sur La Programmation Iso G90-CorrigeДокумент1 страницаExercice Sur La Programmation Iso G90-CorrigekhocineОценок пока нет
- QQДокумент1 страницаQQkhocineОценок пока нет
- FLEXIONДокумент6 страницFLEXIONkhocineОценок пока нет
- 06-Résumé-Engrenage Droit À Denture Droite PDFДокумент1 страница06-Résumé-Engrenage Droit À Denture Droite PDFkhocineОценок пока нет
- Dessin EnsembleДокумент1 страницаDessin EnsemblekhocineОценок пока нет
- Le Cycle Carre Avec Sequenc - Schéma 1Документ1 страницаLe Cycle Carre Avec Sequenc - Schéma 1khocineОценок пока нет
- Encastrement PDFДокумент8 страницEncastrement PDFHechmi ChermitiОценок пока нет
- Mise en Position PDFДокумент2 страницыMise en Position PDFkhocine100% (2)
- SocleДокумент1 страницаSoclekhocineОценок пока нет
- TDG (Cours)Документ5 страницTDG (Cours)khocineОценок пока нет
- Torsion Simple Et ApplicationДокумент8 страницTorsion Simple Et ApplicationribabbouОценок пока нет
- 34 Reducteur PDFДокумент2 страницы34 Reducteur PDFkhocine67% (6)
- Exercice 1Документ1 страницаExercice 1khocineОценок пока нет
- Cotation de FabДокумент2 страницыCotation de FabkhocineОценок пока нет
- Dessin de DéfinitionДокумент3 страницыDessin de DéfinitionkhocineОценок пока нет
- Afrique 16Документ1 страницаAfrique 16khocineОценок пока нет
- Conception D Un Montage de RoulementДокумент3 страницыConception D Un Montage de RoulementkhocineОценок пока нет
- Systeme Entrainement de TapisДокумент1 страницаSysteme Entrainement de TapiskhocineОценок пока нет
- Conception D Un Montage de RoulementДокумент1 страницаConception D Un Montage de Roulementabder2222Оценок пока нет
- Ot101 FR LeseprobeДокумент13 страницOt101 FR LeseprobeDvid7887Оценок пока нет
- Dessin ReducteurДокумент1 страницаDessin ReducteurkhocineОценок пока нет
- Dessin ReducteurДокумент1 страницаDessin ReducteurkhocineОценок пока нет
- Coupes Par Et SeДокумент1 страницаCoupes Par Et SekhocineОценок пока нет
- 01 L'Énergie PneumatiqueДокумент2 страницы01 L'Énergie Pneumatiqueجمال ضيفي100% (1)
- Devoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFДокумент8 страницDevoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFkhocineОценок пока нет
- Les Eléments Standards PDFДокумент2 страницыLes Eléments Standards PDFkhocineОценок пока нет
- 02 TerminologieДокумент16 страниц02 TerminologiekhocineОценок пока нет
- _Документ1 страница_khocineОценок пока нет
- TerminologieДокумент10 страницTerminologiekhocineОценок пока нет
- 01 Généralité PDFДокумент4 страницы01 Généralité PDFkhocineОценок пока нет
- Cours Exercices TCT 1ère ST... Et 2 Ème SM-BДокумент20 страницCours Exercices TCT 1ère ST... Et 2 Ème SM-BMrnadhir MecaniqueОценок пока нет
- 257ELEДокумент10 страниц257ELEMoez MizouОценок пока нет
- TransistorsДокумент42 страницыTransistorsabdou_scribd100% (1)
- Manuale 2Документ438 страницManuale 2coulibalyoumar100% (1)
- TD5 TelesiégeДокумент4 страницыTD5 TelesiégeFerchichi HatemОценок пока нет
- Configuration Matériel D'un Ordinateur (Le Cours)Документ25 страницConfiguration Matériel D'un Ordinateur (Le Cours)أحمد رميدة88% (16)
- RMT gt380 550 FTPДокумент98 страницRMT gt380 550 FTPYoupОценок пока нет
- InjectieДокумент326 страницInjectieFlorin Mihut100% (2)
- SM Ecosysm2640idw Series Rev3Документ517 страницSM Ecosysm2640idw Series Rev3Farapon Paul100% (1)
- Schemas ElrecДокумент24 страницыSchemas ElrecSohaib SFAIRIОценок пока нет
- Temp or I SationsДокумент40 страницTemp or I SationsPaul DayОценок пока нет
- Exercice Hydraulique 2Документ7 страницExercice Hydraulique 2samisamata7Оценок пока нет
- Polycopié de TD: Transformateurs TRANSFORMATEURS MonophasésДокумент32 страницыPolycopié de TD: Transformateurs TRANSFORMATEURS Monophasésbarkoukfadma21Оценок пока нет
- TecnAlarme PDFДокумент44 страницыTecnAlarme PDFSemou DioufОценок пока нет
- PSOCДокумент27 страницPSOCSofia CathyОценок пока нет
- Linz Manual Phase9 20207Документ36 страницLinz Manual Phase9 20207Jairo GarciaОценок пока нет
- Kal Sys20 FR 2V2 Rec 102-020401276Документ8 страницKal Sys20 FR 2V2 Rec 102-020401276richard cessiecqОценок пока нет
- Le Moteur Pas A PasДокумент11 страницLe Moteur Pas A Paswail sifourОценок пока нет
- Reseaux CablageДокумент5 страницReseaux CablageCHAIRMANОценок пока нет
- La Boîte DSG À Double Embrayage À 7 Rapports 0BT Du T5 2010Документ72 страницыLa Boîte DSG À Double Embrayage À 7 Rapports 0BT Du T5 2010Hocine Fahem100% (1)
- KANBANДокумент15 страницKANBANYoussef AmhineОценок пока нет
- Contrôler Le Moteur Pas À Pas 28BYJДокумент18 страницContrôler Le Moteur Pas À Pas 28BYJEmmanuel MaïОценок пока нет
- 536-1 S-CEMS Tombereaux Articulés Série 2Документ40 страниц536-1 S-CEMS Tombereaux Articulés Série 2cherifОценок пока нет
- CCTP-Lot 6Документ78 страницCCTP-Lot 6Feki MahdiОценок пока нет
- IT Chapitre 3Документ31 страницаIT Chapitre 3venanceharoldОценок пока нет
- Partie2 Topologies ProduitsДокумент42 страницыPartie2 Topologies ProduitsMerryОценок пока нет
- 06 Pike Reba RVL Dual Air SVC Guide French 95.4015.003.000 - AДокумент11 страниц06 Pike Reba RVL Dual Air SVC Guide French 95.4015.003.000 - AtitileschmittОценок пока нет
- DM02NSF0213M00 Notice Maintenance CLCU19-CLCU30Документ131 страницаDM02NSF0213M00 Notice Maintenance CLCU19-CLCU30Yassine SargaliОценок пока нет
- 1A Devoir de Synthèse N°2 - TM 2014Документ6 страниц1A Devoir de Synthèse N°2 - TM 2014Kamel TayahiОценок пока нет