Вам также может понравиться
- Mecanismos TopologiaДокумент10 страницMecanismos TopologiaCésar LaraОценок пока нет
- Análisis y Síntesis de MecanismosДокумент114 страницAnálisis y Síntesis de MecanismosOstrogradski Sacks Alembert92% (12)
- Grados de LibertadДокумент6 страницGrados de LibertadOscar MoralesОценок пока нет
- Definiciones Básicas de Diseño de MaquinariaДокумент24 страницыDefiniciones Básicas de Diseño de MaquinariaMonica Quezada ElizaldeОценок пока нет
- Introduccion ALos MecanismosДокумент20 страницIntroduccion ALos MecanismosjonferctОценок пока нет
- Descripción y Ejemplos de Mecanismos PDFДокумент13 страницDescripción y Ejemplos de Mecanismos PDFJulioCarlosSantos100% (1)
- Análisis Estructural y de Movilidad de Mecanismos PlanosДокумент34 страницыAnálisis Estructural y de Movilidad de Mecanismos PlanosFrancisco Miguel López Castillo100% (1)
- Tema 1-Geometria Del MovimientoДокумент20 страницTema 1-Geometria Del MovimientoDarío RiosaОценок пока нет
- Trabajo U1 y U2 MecanismosДокумент16 страницTrabajo U1 y U2 MecanismosMARCOS CASTILLOОценок пока нет
- Teoria de Maquinas y MecanismosДокумент12 страницTeoria de Maquinas y MecanismosEdgar ReyesОценок пока нет
- Mecanismos Analisis & SintesisДокумент34 страницыMecanismos Analisis & SintesisMarlonFabricioCayoОценок пока нет
- Análisis de mecanismo plano MC-417Документ38 страницAnálisis de mecanismo plano MC-417Olivert Honorio ApazaОценок пока нет
- Monografia de MecanismosДокумент42 страницыMonografia de MecanismosjoeluczaОценок пока нет
- Mecanismos. Grado de LibertadДокумент13 страницMecanismos. Grado de Libertadflores floresОценок пока нет
- Conceptos Basicos de MecanismosДокумент34 страницыConceptos Basicos de MecanismosAmairani SerranoОценок пока нет
- Concepto de Cadena Cinematica PDFДокумент13 страницConcepto de Cadena Cinematica PDFRosalino Leonides Martinez MarquezОценок пока нет
- Informe de Diagramas CinematicosДокумент5 страницInforme de Diagramas Cinematicosdianis cruzОценок пока нет
- Cap02 01Документ14 страницCap02 01Alejandro KraemerОценок пока нет
- Análisis mecanismos 4 barrasДокумент27 страницAnálisis mecanismos 4 barrasMathewos DefaОценок пока нет
- Diseño de mecanismos: Conceptos básicosДокумент45 страницDiseño de mecanismos: Conceptos básicosEdgardo Atoche SánchezОценок пока нет
- ZSjVRU Cap1y2Документ32 страницыZSjVRU Cap1y2Erik Ivan Peñuelas CruzОценок пока нет
- Dennis Rojano1210mecanismos PDFДокумент9 страницDennis Rojano1210mecanismos PDFCristian Rosero100% (1)
- Tema 1 Introducción A La Teoría de Mecanismos y MáquinasДокумент17 страницTema 1 Introducción A La Teoría de Mecanismos y Máquinasalbertocc1978Оценок пока нет
- Clase 1Документ34 страницыClase 1David Estrada GrisalesОценок пока нет
- Mecanismos - Biela - Manivela - Corredera PDFДокумент69 страницMecanismos - Biela - Manivela - Corredera PDFMiguelAngelJauregui100% (1)
- Introduccion A Los MecanismosДокумент131 страницаIntroduccion A Los MecanismosCarlos100% (1)
- Mecanismos 1Документ94 страницыMecanismos 1Benhamin Vaz Zu83% (6)
- Maquinas y MecanismosДокумент8 страницMaquinas y Mecanismosjiovany moralesОценок пока нет
- Introduccion A Los MecanismosДокумент123 страницыIntroduccion A Los MecanismosIsaac GutierrezОценок пока нет
- 1 Introduccion Al Estudio de MECANISMOSДокумент22 страницы1 Introduccion Al Estudio de MECANISMOSRaul GonzalezОценок пока нет
- Resumen Capitulo 2Документ16 страницResumen Capitulo 2Elton GuadarramaОценок пока нет
- Teoría de Mecanismos - Cap 1Документ14 страницTeoría de Mecanismos - Cap 1Andrés PulupaОценок пока нет
- MOVILIDADДокумент13 страницMOVILIDADlmaldonado_349011Оценок пока нет
- Analisis Topologico de MecanismosДокумент8 страницAnalisis Topologico de MecanismosAna GPОценок пока нет
- Mecanismos. Examen Parcial IДокумент16 страницMecanismos. Examen Parcial IDiego JordánОценок пока нет
- Introduccion A Los MecanismosДокумент338 страницIntroduccion A Los MecanismosAquino MiguelОценок пока нет
- SintesisДокумент5 страницSintesis5deBlstekОценок пока нет
- MovilidadДокумент21 страницаMovilidadOscar Zavala SalasОценок пока нет
- EMA01 - Ficha Teórica Clase 1. Mecanismos ArticuladosДокумент18 страницEMA01 - Ficha Teórica Clase 1. Mecanismos ArticuladosNaty FumagalliОценок пока нет
- Tarea U1 - InvestigaciónДокумент13 страницTarea U1 - InvestigaciónPepe SanchezОценок пока нет
- Reactivos CardozoДокумент41 страницаReactivos CardozoMiguel Angel CasiqueОценок пока нет
- Diseño Mecánico 1Документ122 страницыDiseño Mecánico 1Alexander SolanoОценок пока нет
- Asignación Individual 1Документ4 страницыAsignación Individual 1Selena BalsasОценок пока нет
- Introducción a los mecanismos: conceptos, clasificación y teorema de GrüblerДокумент5 страницIntroducción a los mecanismos: conceptos, clasificación y teorema de Grübler5deBlstekОценок пока нет
- MECANISMOSДокумент37 страницMECANISMOSErick BrayanОценок пока нет
- Clasificación de Los Pares CinemáticosДокумент11 страницClasificación de Los Pares CinemáticosErick Santiago Mata HerreraОценок пока нет
- MecanismoДокумент29 страницMecanismoYda Fernandez EspinОценок пока нет
- TEMA 1 - Topologia de MecanismosДокумент34 страницыTEMA 1 - Topologia de MecanismosChemaRosaCanovasОценок пока нет
- Análisis cinemática mecanismosДокумент12 страницAnálisis cinemática mecanismosracso4242Оценок пока нет
- Generalidades de Los MecanismosДокумент5 страницGeneralidades de Los MecanismosRaymundo Gracia Reyna67% (3)
- 2-3-Analisis y sintesis de mecanismosДокумент27 страниц2-3-Analisis y sintesis de mecanismosnarvaez.davidОценок пока нет
- Presentación de PowerPointДокумент25 страницPresentación de PowerPointBRYAN ISMAEL RAMIREZ MEDINAОценок пока нет
- Conceptos Generales de MecanismosДокумент14 страницConceptos Generales de MecanismosMauricio LoachaminОценок пока нет
- Verificación de estructuras deformadas. TMVL0309От EverandVerificación de estructuras deformadas. TMVL0309Рейтинг: 5 из 5 звезд5/5 (1)
- Guía para el análisis y solución de problemas de resistencia de materialesОт EverandGuía para el análisis y solución de problemas de resistencia de materialesОценок пока нет
- Indice General de ContenidoДокумент7 страницIndice General de Contenidoeays_69Оценок пока нет
- Mejoras Autocad 2000Документ2 страницыMejoras Autocad 2000eays_69Оценок пока нет
- Mantenimientodeembarcacionesdeacero 160706220526Документ33 страницыMantenimientodeembarcacionesdeacero 160706220526eays_69Оценок пока нет
- Curso Autocad 2007 Nivel 1-4 Sistema X-Y PuntosДокумент295 страницCurso Autocad 2007 Nivel 1-4 Sistema X-Y PuntosThomas VercettiОценок пока нет
- VR 06 ResueltoДокумент14 страницVR 06 Resueltoeays_69Оценок пока нет
- Mecanismos articulados: características de cuatro barrasДокумент39 страницMecanismos articulados: características de cuatro barraseays_6950% (2)
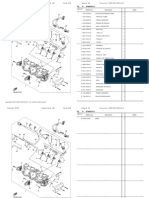
- Yzf-R6 Admision 2Документ2 страницыYzf-R6 Admision 2JOSEP MARIA VILELLA RAMONEDAОценок пока нет
- Acomples MecanicosДокумент10 страницAcomples MecanicosRodrigo Israel Vega VillarroelОценок пока нет
- Ensayo Pymes ColombiaДокумент4 страницыEnsayo Pymes ColombiaFernando VallesterosОценок пока нет
- Taller 7 PtunДокумент6 страницTaller 7 Ptunleonel Ariste ZúñigaОценок пока нет
- Parte1 PDFДокумент59 страницParte1 PDFviavik56% (16)
- Minihidroelectricas PDFДокумент15 страницMinihidroelectricas PDFacademicopersonalОценок пока нет
- Pizzeria CompletoДокумент10 страницPizzeria CompletoodarinaОценок пока нет
- Windows 98 - InformeДокумент5 страницWindows 98 - InformesouljuanОценок пока нет
- Falcon PDFДокумент29 страницFalcon PDFZulenisОценок пока нет
- Método de ZeevaertДокумент2 страницыMétodo de ZeevaertEsmir CatarpОценок пока нет
- Tradimecc AbigailДокумент3 страницыTradimecc AbigailEenz Edu100% (1)
- Marco TeoricoДокумент21 страницаMarco TeoricoJhosteing MoralesОценок пока нет
- CuestionarioДокумент2 страницыCuestionarioMoises Alonso Gomez RamirezОценок пока нет
- La Energia FotovoltaicaДокумент4 страницыLa Energia FotovoltaicaMaria Beltran HerreraОценок пока нет
- Problema 1Документ3 страницыProblema 1Misael Estrada MartinezОценок пока нет
- Guia Didactica Unidad3 Calc IIДокумент7 страницGuia Didactica Unidad3 Calc IIDiomer A. MejiasОценок пока нет
- El Suelo Como Recurso Natural y Su Capacidad para AlmacenarДокумент8 страницEl Suelo Como Recurso Natural y Su Capacidad para AlmacenarNelsonFrancescoОценок пока нет
- 167-087C CMAX SpanishДокумент37 страниц167-087C CMAX SpanishandreborlandoОценок пока нет
- Alex - Labraña Tarea 6Документ5 страницAlex - Labraña Tarea 6Alex Labraña RojoОценок пока нет
- El Hombre Como Ser PrácticoДокумент6 страницEl Hombre Como Ser PrácticoGama50% (2)
- Modelo de Hoja de RutaДокумент3 страницыModelo de Hoja de RutaSol DuicelaОценок пока нет
- Bombas de aviación: clasificación y componentesДокумент50 страницBombas de aviación: clasificación y componentesLuis DucheОценок пока нет
- Lookahead Frente 1 AbrilДокумент8 страницLookahead Frente 1 AbrilAlex Armando Rojas GonzaloОценок пока нет
- Ejercicios de Soplo para La Intervención en RotacismoДокумент26 страницEjercicios de Soplo para La Intervención en RotacismoAlmudena VergaraОценок пока нет
- Instructivo Cargo Auxiliar de BodegaДокумент1 страницаInstructivo Cargo Auxiliar de BodegaRafael NuñezОценок пока нет
- Planilla Metrados A.confinada-ModeloДокумент36 страницPlanilla Metrados A.confinada-ModeloGraceUcañanFernandezОценок пока нет
- Informe de Gestion de RiesgosДокумент5 страницInforme de Gestion de RiesgosErick Russell MalpicaОценок пока нет
- Implementación del código de barras para mejorar el control de inventarios en COLVISEGДокумент29 страницImplementación del código de barras para mejorar el control de inventarios en COLVISEGyanethmarthaОценок пока нет
- Historia y servicios Caja CuscoДокумент22 страницыHistoria y servicios Caja CuscoSofi Irene Ayte Gomez0% (1)
- Sesión S17 Tutoría Viernes 16.07.21Документ4 страницыSesión S17 Tutoría Viernes 16.07.21Anabelle UsquianoОценок пока нет