Вам также может понравиться
- Certificate of IncorporationДокумент2 страницыCertificate of Incorporationbhathiyaeng100% (1)
- Theory of Machines - E-NoteДокумент130 страницTheory of Machines - E-Notesubhesh_999100% (1)
- Unit 2Документ19 страницUnit 2AnasОценок пока нет
- C.Cuong - 0928-FinalДокумент10 страницC.Cuong - 0928-FinalThao PhuongОценок пока нет
- Mathematical Modeling of AUV: 3.1 StaticsДокумент32 страницыMathematical Modeling of AUV: 3.1 Staticsmohammed qmeОценок пока нет
- Module 5Документ4 страницыModule 5Joshua JunioОценок пока нет
- 25.04.2022-501&502 Plane Kinematics of Rigid BodiesДокумент23 страницы25.04.2022-501&502 Plane Kinematics of Rigid BodiesCheccu PjanicОценок пока нет
- Velocity and Position Control of A Wheel 2 PDFДокумент9 страницVelocity and Position Control of A Wheel 2 PDFdannyabeОценок пока нет
- MechanicsДокумент105 страницMechanicsBeesam Ramesh KumarОценок пока нет
- Rov Suspension KinematicsДокумент6 страницRov Suspension KinematicsNithil PasunuriОценок пока нет
- Simulation and Dynamic Analysis of Remotely Operated Vehicle (ROV) Using PID Controller For Pitch MovementДокумент9 страницSimulation and Dynamic Analysis of Remotely Operated Vehicle (ROV) Using PID Controller For Pitch Movementahsikhan007Оценок пока нет
- Modeling of A Hexapod Robot Kinematic Equivalence To A UnicycleДокумент8 страницModeling of A Hexapod Robot Kinematic Equivalence To A UnicycleChinh Hoang QuangОценок пока нет
- Lecture 3Документ31 страницаLecture 3Wolf DragonneОценок пока нет
- EEN-408 Hidrodinâmica Aplicada II: 3. Prediction of Ship ManoeuvrabilityДокумент30 страницEEN-408 Hidrodinâmica Aplicada II: 3. Prediction of Ship ManoeuvrabilityBarbara OliveiraОценок пока нет
- Robotics MotionДокумент29 страницRobotics MotionfenixnomahotmailcomОценок пока нет
- Fundamentals of Vehicle Dynamics: Lecture 1-2Документ26 страницFundamentals of Vehicle Dynamics: Lecture 1-2obeidОценок пока нет
- Planar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabДокумент23 страницыPlanar Kinematics of A Rigid Body: Ir. Dr. Mohd Noor Arib Bin MD RejabYipОценок пока нет
- Forward and Inverse Kinematics of Orientation: Unit - 3Документ13 страницForward and Inverse Kinematics of Orientation: Unit - 3basharat hussainОценок пока нет
- Omnidirectional Static Walking of A Quadruped Robot On A SlopeДокумент2 страницыOmnidirectional Static Walking of A Quadruped Robot On A SlopealienkanibalОценок пока нет
- Welcome: Machanical Engineering Department, PuoДокумент32 страницыWelcome: Machanical Engineering Department, PuoFirdaus MaselanОценок пока нет
- Simulation and Dynamic Analysis of Remotely Operated Vehicle (ROV) Using PID Controller For Pitch MovementДокумент10 страницSimulation and Dynamic Analysis of Remotely Operated Vehicle (ROV) Using PID Controller For Pitch MovementHo Van RoiОценок пока нет
- Lec-6 Introduction To Graphical Kinematic AnalysisДокумент12 страницLec-6 Introduction To Graphical Kinematic Analysispragathi mudavathОценок пока нет
- FD Lab5Документ13 страницFD Lab5Carlos RodríguezОценок пока нет
- Lecture Notes - DynamicsДокумент29 страницLecture Notes - DynamicsFELIX KEUYAОценок пока нет
- Differential Drive RobotДокумент5 страницDifferential Drive RobotYaveesh Yav OОценок пока нет
- Direction Cosine Matrix IMU: TheoryДокумент30 страницDirection Cosine Matrix IMU: TheoryNeelam ShuklaОценок пока нет
- Part 4Документ32 страницыPart 4jk.fajardo4Оценок пока нет
- Plane: KinematicsДокумент87 страницPlane: KinematicsAhmed Sobhi l أحمد صبحيОценок пока нет
- Module 5 Planar Kinematics of A Rigid BodyДокумент104 страницыModule 5 Planar Kinematics of A Rigid BodyHuy VũОценок пока нет
- Motion Review NoteДокумент2 страницыMotion Review NoteJoseph GagnonОценок пока нет
- Ch02 2Документ35 страницCh02 2이재봉Оценок пока нет
- Mobile Robot PaperДокумент9 страницMobile Robot PaperAryan Singh BoraОценок пока нет
- LP 31 Dynamics of Rigid Bodies 2Документ30 страницLP 31 Dynamics of Rigid Bodies 2Kent JazminesОценок пока нет
- Kinematics: Describe The Dynamics:study The Statitcs: Objects inДокумент6 страницKinematics: Describe The Dynamics:study The Statitcs: Objects innoОценок пока нет
- Chapter 3 Kinematics of Rigid Bodies 2DДокумент55 страницChapter 3 Kinematics of Rigid Bodies 2D2021839932Оценок пока нет
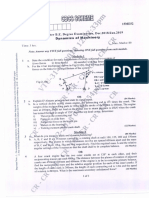
- 15ME52 DOM Dec-2018Документ40 страниц15ME52 DOM Dec-2018prashanthattiОценок пока нет
- 62 22 1 PBДокумент8 страниц62 22 1 PBmaria graça dias portas automáticas ldaОценок пока нет
- Tutorial 1 c8Документ11 страницTutorial 1 c8Priyaa JayasankarОценок пока нет
- Chapter 12, Mobile RobotДокумент17 страницChapter 12, Mobile RobotAkram AlsadeqОценок пока нет
- Dynamics of Rigid BodyДокумент15 страницDynamics of Rigid BodyZareef ZaОценок пока нет
- 2022 Kybernetika UROVДокумент17 страниц2022 Kybernetika UROVRalph Gerard SangalangОценок пока нет
- 5rotational Motion of Rigid BodiesДокумент17 страниц5rotational Motion of Rigid BodiesImmadОценок пока нет
- Rotational MotionДокумент4 страницыRotational MotionWraith KingОценок пока нет
- CON231-Global Sliding Mode Control For A Fully Actuated Non-Planar Hexarotor Aerial VehicleДокумент14 страницCON231-Global Sliding Mode Control For A Fully Actuated Non-Planar Hexarotor Aerial Vehicledayvox10Оценок пока нет
- 04 Handout 12 PDFДокумент6 страниц04 Handout 12 PDFNial HoerunОценок пока нет
- Three-Dimensional Kinematics of Rigid Bodies: Hiroki OkuboДокумент2 страницыThree-Dimensional Kinematics of Rigid Bodies: Hiroki OkuboViraj GaonkarОценок пока нет
- GyroscopeДокумент23 страницыGyroscopeHarikesh maliОценок пока нет
- 2ndLE Lecture 23 and Recit Review - R9 Rotational KinematicsДокумент22 страницы2ndLE Lecture 23 and Recit Review - R9 Rotational KinematicsLeanna DaneОценок пока нет
- Modeling of ROVДокумент19 страницModeling of ROVJust SmileОценок пока нет
- I PUC Physics Remedial Notes - 123619Документ17 страницI PUC Physics Remedial Notes - 123619nithinganesh174Оценок пока нет
- Topic 3. Gyroscopic CoupledocxДокумент11 страницTopic 3. Gyroscopic CoupledocxOrbital TechОценок пока нет
- Using A Rotating Column of Liquid On A Recycled Record Player To Measure The Acceleration of GravityДокумент6 страницUsing A Rotating Column of Liquid On A Recycled Record Player To Measure The Acceleration of GravitykostanОценок пока нет
- Dynamics of Rotational MotionДокумент45 страницDynamics of Rotational MotionAudrry Dela CruzОценок пока нет
- 1.9 Forces Acting On A Rail Vehicle System: 1. Constraint Forces Between W/RДокумент35 страниц1.9 Forces Acting On A Rail Vehicle System: 1. Constraint Forces Between W/RAbel TeclayОценок пока нет
- Curvilinear MotionДокумент5 страницCurvilinear MotionRichardsssdОценок пока нет
- Cinemática Del Cuerpo RígidoДокумент49 страницCinemática Del Cuerpo RígidoAna VelezОценок пока нет
- DORB001 - FINAL PROJECT Group 1Документ15 страницDORB001 - FINAL PROJECT Group 1Trina ArmeaОценок пока нет
- 2012-1811. Robot Arm Kinematics DH IntroДокумент75 страниц2012-1811. Robot Arm Kinematics DH IntroG30nyОценок пока нет
- Robot Manipulators: Modeling, Performance Analysis and ControlОт EverandRobot Manipulators: Modeling, Performance Analysis and ControlОценок пока нет
- Dynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldОт EverandDynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldОценок пока нет
- USA Political Parties - 2Документ11 страницUSA Political Parties - 2bhathiyaengОценок пока нет
- MGMT 6250 Financial Modeling and Optimization: Aparna GuptaДокумент6 страницMGMT 6250 Financial Modeling and Optimization: Aparna GuptabhathiyaengОценок пока нет
- Robust Principal Component AnalysisДокумент39 страницRobust Principal Component AnalysisbhathiyaengОценок пока нет
- Workshop FlyerДокумент2 страницыWorkshop FlyerbhathiyaengОценок пока нет
- Acknowledgement: I Wish To Extend My Sincere Gratitude To MR.S.M.N Samarasekare, The Operations ManagerДокумент1 страницаAcknowledgement: I Wish To Extend My Sincere Gratitude To MR.S.M.N Samarasekare, The Operations ManagerbhathiyaengОценок пока нет
- GSM Air InterfaceДокумент10 страницGSM Air InterfacebhathiyaengОценок пока нет
- EE 324 - Communication Systems EE 384 - Engineering Systems: Dr. Himal A. SuraweeraДокумент11 страницEE 324 - Communication Systems EE 384 - Engineering Systems: Dr. Himal A. SuraweerabhathiyaengОценок пока нет
- Introduction To 2G & 3GДокумент23 страницыIntroduction To 2G & 3GbhathiyaengОценок пока нет
- Guidance and Control of Ocean VehiclesДокумент4 страницыGuidance and Control of Ocean VehiclesbhathiyaengОценок пока нет
- Question BankДокумент6 страницQuestion BankbhathiyaengОценок пока нет
- R.M.B.E.B Rathnayake: Mobile: +94 776321022Документ3 страницыR.M.B.E.B Rathnayake: Mobile: +94 776321022bhathiyaengОценок пока нет
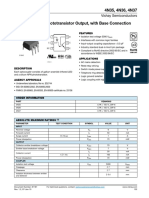
- Vishay Semiconductors: FeaturesДокумент7 страницVishay Semiconductors: FeaturesbhathiyaengОценок пока нет
- YeetДокумент8 страницYeetBeLoopersОценок пока нет
- Lec # 26 NustДокумент18 страницLec # 26 NustFor CheggОценок пока нет
- B.ST Case Study Class 12Документ214 страницB.ST Case Study Class 12Anishka Rathor100% (1)
- ArpitResumeISM PDFДокумент1 страницаArpitResumeISM PDFchethan rОценок пока нет
- A Religious LeadershipДокумент232 страницыA Religious LeadershipBonganiОценок пока нет
- Oxygen BarrierДокумент20 страницOxygen BarrierKarina ArdizziОценок пока нет
- Dr. Najeebuddin Ahmed: 969 Canterbury Road, Lakemba, Sydney, NSW, Australia, 2195Документ2 страницыDr. Najeebuddin Ahmed: 969 Canterbury Road, Lakemba, Sydney, NSW, Australia, 2195Najeebuddin AhmedОценок пока нет
- Algorithm - WikipediaДокумент34 страницыAlgorithm - WikipediaGilbertОценок пока нет
- Science News Explores-June July 2023Документ36 страницScience News Explores-June July 2023Tobei AchimОценок пока нет
- Projects: Term ProjectДокумент2 страницыProjects: Term ProjectCoursePinОценок пока нет
- Danube Coin LaundryДокумент29 страницDanube Coin LaundrymjgosslerОценок пока нет
- Go Ask Alice EssayДокумент6 страницGo Ask Alice Essayafhbexrci100% (2)
- Paul Milgran - A Taxonomy of Mixed Reality Visual DisplaysДокумент11 страницPaul Milgran - A Taxonomy of Mixed Reality Visual DisplaysPresencaVirtual100% (1)
- 1grade 9 Daily Lesson Log For Demo 1 4Документ5 страниц1grade 9 Daily Lesson Log For Demo 1 4cristy olivaОценок пока нет
- Floor Paln ModelДокумент15 страницFloor Paln ModelSaurav RanjanОценок пока нет
- Aman 5Документ1 страницаAman 5HamidОценок пока нет
- Soneri Bank Compensation PolicyДокумент20 страницSoneri Bank Compensation PolicySapii MandhanОценок пока нет
- Introduction To AirtelДокумент6 страницIntroduction To AirtelPriya Gupta100% (1)
- White Button Mushroom Cultivation ManualДокумент8 страницWhite Button Mushroom Cultivation ManualKhurram Ismail100% (4)
- Mobile Based IVR SystemДокумент17 страницMobile Based IVR SystemIndraysh Vijay [EC - 76]Оценок пока нет
- Application of ARIMAX ModelДокумент5 страницApplication of ARIMAX ModelAgus Setiansyah Idris ShalehОценок пока нет
- Legal Ethics HW 5Документ7 страницLegal Ethics HW 5Julius Robert JuicoОценок пока нет
- Circuitos Digitales III: #IncludeДокумент2 страницыCircuitos Digitales III: #IncludeCristiamОценок пока нет
- Data Sheet: Elcometer 108 Hydraulic Adhesion TestersДокумент3 страницыData Sheet: Elcometer 108 Hydraulic Adhesion TesterstilanfernandoОценок пока нет
- Braga - 2016 - On Standing's A Precariat Charter - Confronting The Precaritisation of Labour in Brazil and PortugalДокумент12 страницBraga - 2016 - On Standing's A Precariat Charter - Confronting The Precaritisation of Labour in Brazil and PortugalLiam MurciaОценок пока нет
- Certification and LettersДокумент6 страницCertification and LettersReimar FerrarenОценок пока нет
- SPC Abc Security Agrmnt PDFДокумент6 страницSPC Abc Security Agrmnt PDFChristian Comunity100% (3)
- Business Testimony 3Документ14 страницBusiness Testimony 3Sapan BanerjeeОценок пока нет
- Proposal For Chemical Shed at Keraniganj - 15.04.21Документ14 страницProposal For Chemical Shed at Keraniganj - 15.04.21HabibОценок пока нет
- Life Cycle Cost Analysis of Hvac System in Office ProjectsДокумент3 страницыLife Cycle Cost Analysis of Hvac System in Office ProjectsVashuka GhritlahreОценок пока нет